日志分析案例研究:周转率调整¶
分析飞行日志可以帮助您诊断任务中出现的问题。本案例中,我们的常驻专家安德鲁-特里吉尔(Andrew Tridgell)通过分析日志数据,建议调整转弯率和增大最大滚转角,以纠正飞机因转弯过慢而无法到达航点的问题。您可以在论坛上找到原始帖子 **这里***.
DIY Drones 会员 Vishnu 发布了他的 X8 飞机使用 APM 代码 2.73 的日志。他描述了自动起飞时的一个问题,尽管油门设置为 75%,但仍能保持 100%。
5/26/2013 tlog 文件 (803 KB) - 从原始博文下载 **这里***.- X8 节流阀回转速率 100 参数文件
通过使用 Mavgraph特里奇提出了以下见解。
2013年5月29日,DIYDrones;发布到Plane 2.x软件论坛:**
"我看了一下你们的日志,最大的问题是 RLL2SRV_P 不够大,而且你们没有给 Plane 足够的转弯率权限。
你的航班就是这个样子:
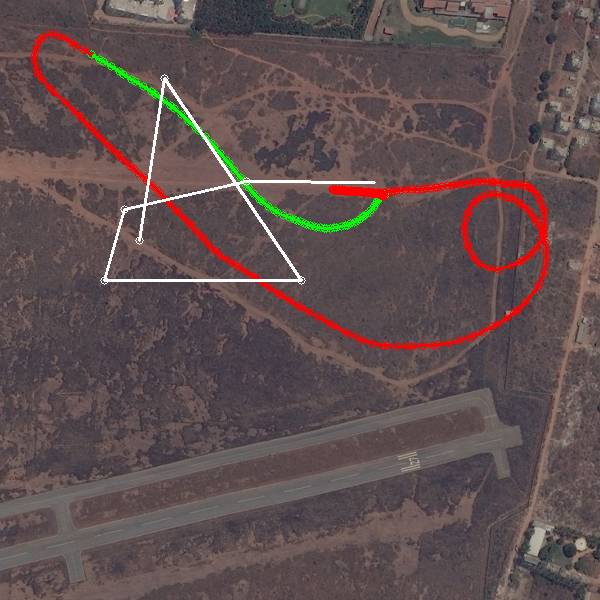
可以看到,它确实到达了第一个航点,但在到达第二个航点时转向太慢。
让我们来看看导航滚转(飞机希望实现的滚转)和实际滚转的曲线图。红线代表任务序列号。
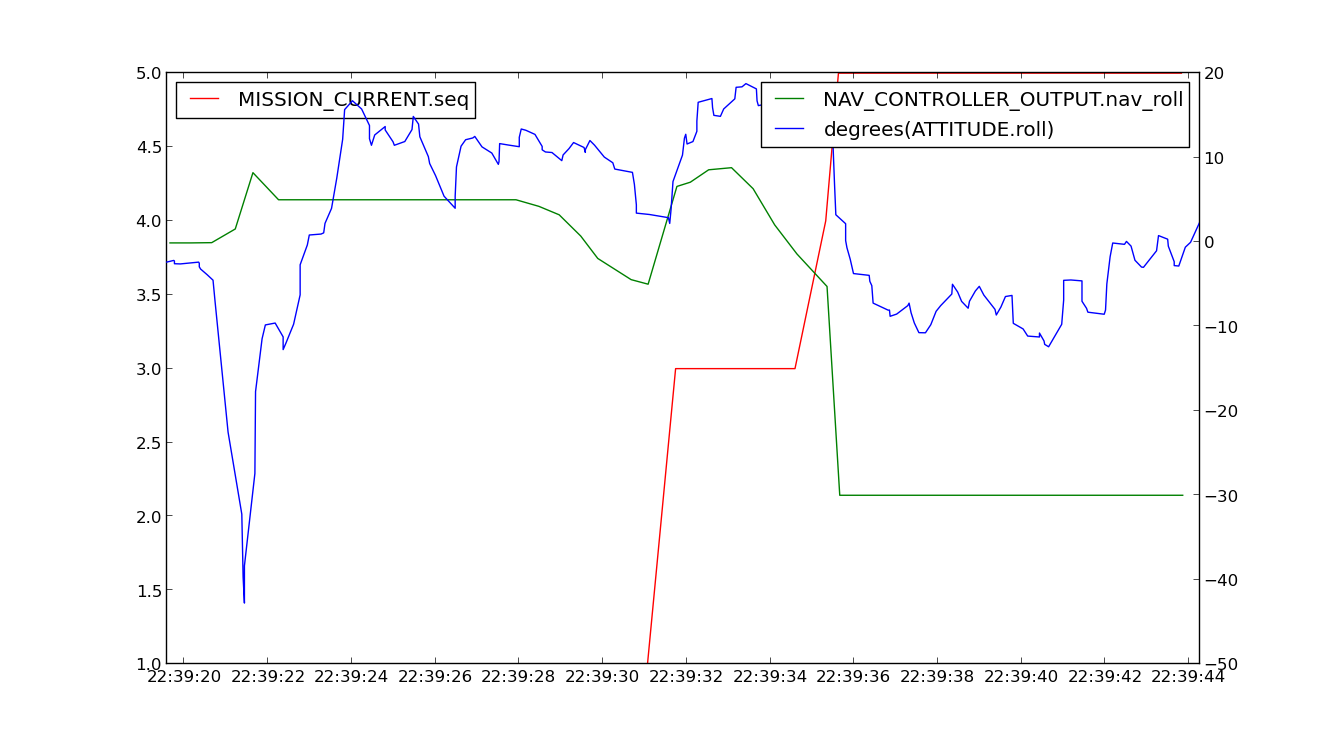
起飞时 nav_roll 较小,因为它是直线飞行。它随后会翻滚到 -30 度,因为这是您指定的 ROLL_LIMIT_DEG。问题是实际的滚转角度仅为-10 度左右。因此,飞机并没有达到 APM 要求的滚转角度。
原因在于您选择的 RLL2SRV_* 参数:
RLL2SRV_D 0.000000
RLL2SRV_I 0.000000
RLL2SRV_IMAX 500.000000
RLL2SRV_P 0.400000
对于像 X8 这样的飞机,您指定的 I 项为零,P 项相当小。让我们看看 APM 在这些设置下最终使用的伺服值:
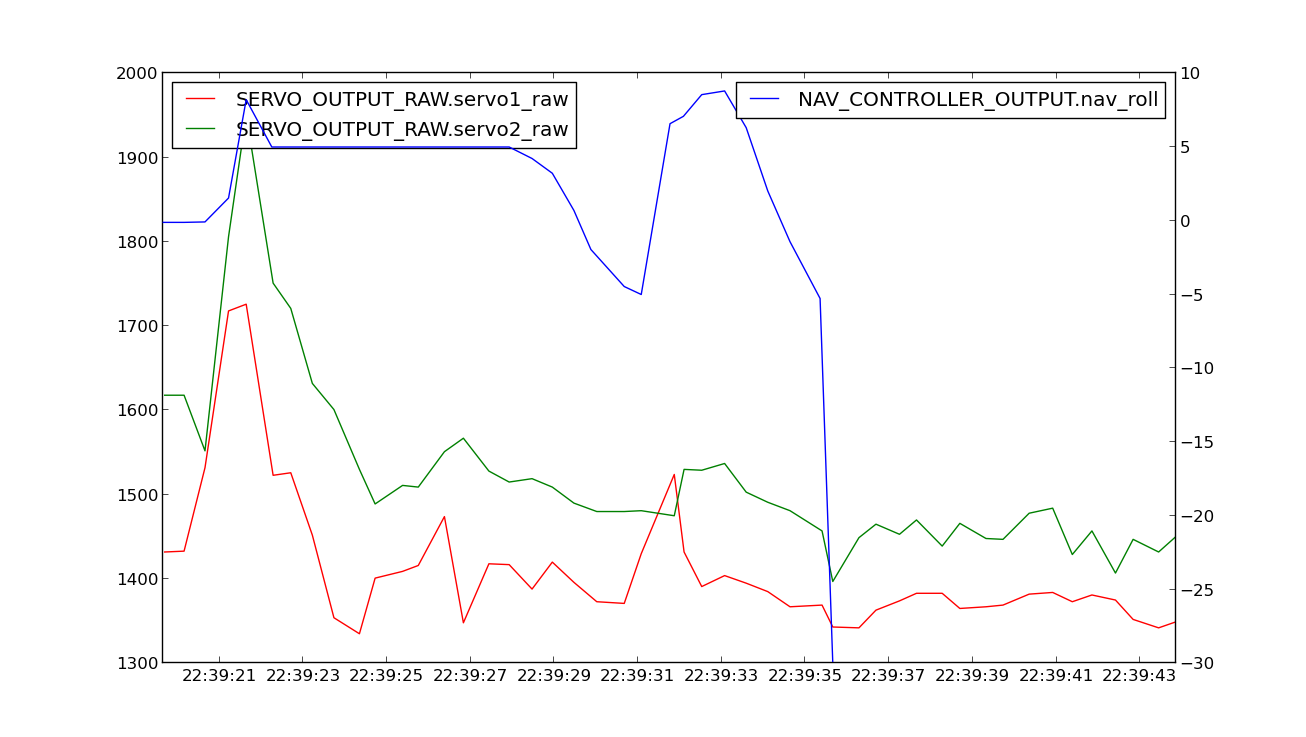
您可以看到 APM 只移动了第一个升降舵一小部分,而第二个升降舵移动了大约 150。现在,让我们将其与您切换到手动飞行时的情况进行比较:
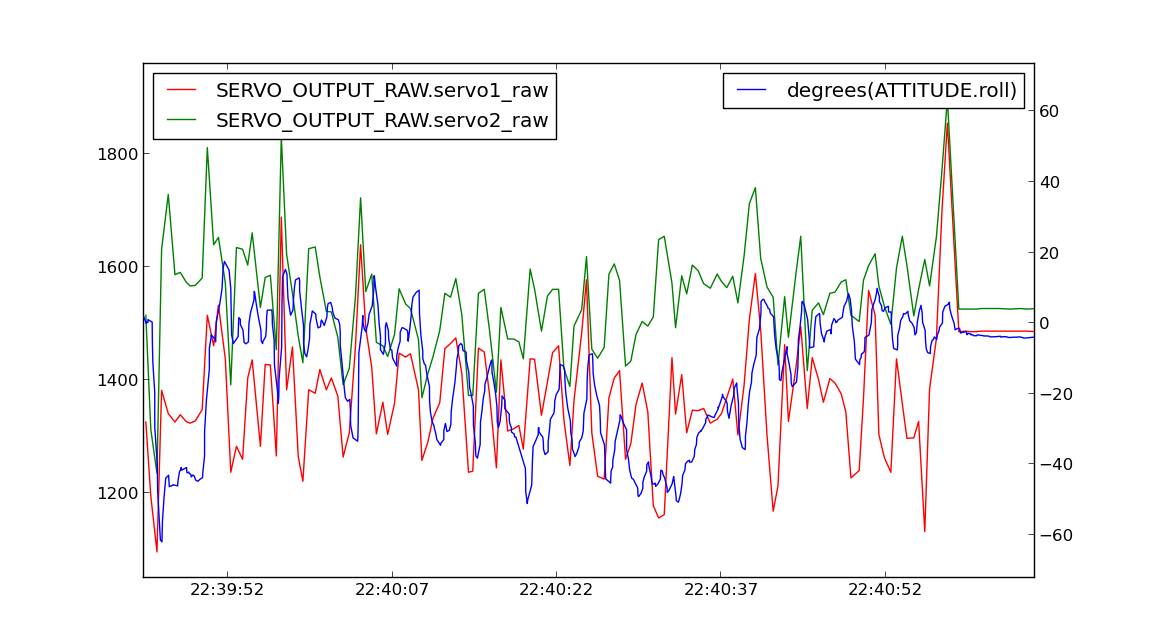
当您手动控制时,飞机向左翻滚了 65 度。而您允许 APM 使用的最大滚转角度为 30 度。
您使用的副翼动作也比 APM 允许使用的多得多。为了使飞机翻滚,您几乎使用了全部左副翼,而 RLL2SRV_P 增益为 0.4,翻滚误差为 20 度,APM 只允许副翼移动 0.4*(20/45)*500,即 89。因此,您移动副翼的幅度是 APM 的 3 倍多。
X8 具有很强的自然稳定性,这也意味着它需要大量的升降舵运动才能翻滚。如果只稍微移动一下升降舵,就无法克服其自然稳定性,也无法克服任何风力或轻微的修整误差。
要解决这个问题,您需要进行以下更改:
将 RLL2SRV_P 提高一倍,达到 0.8,根据测试结果可能会更高
将 RLL2SRV_I 改为 0.1
将 RLL2SRV_IMAX 更改为 1500
您的 NAVL1_PERIOD 值对于 X8 来说也过高。将其改为 18。
你的空速看起来也没有校准好:
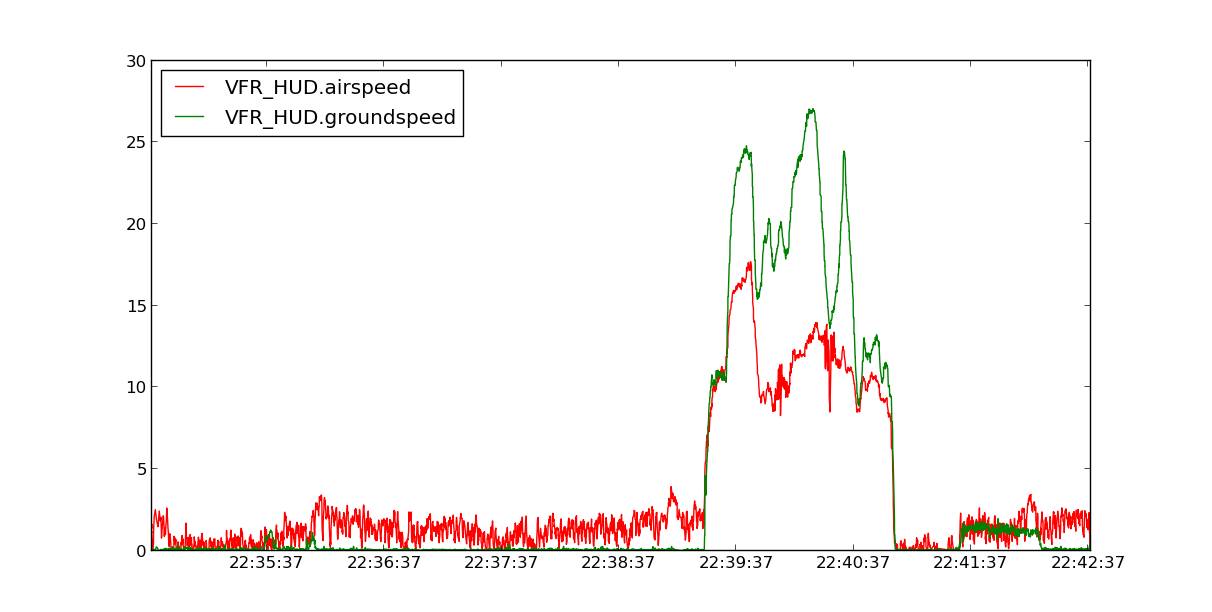
您检查过传感器是否漏气吗?传感器是否正确对准并远离机身?当您位置悬停时,平均空速和地面速度应该一致。您可能需要将 ARSPD_RATIO 调整得大一些。