ArduPilot 是开放源代码 软件 可在多种 硬件.
要成功使用 ArduPilot,必须阅读并遵守飞行器文档中的 "首次设置 "和 "首次飞行/驾驶和调试 "部分!
ArduPilot 能够创建和使用可信、自主的无人驾驶载具系统,为所有人带来和平利益。ArduPilot 提供了一套全面的工具,几乎适用于任何载具和应用。作为一个开放源码项目,ArduPilot 根据庞大用户社区的快速反馈不断发展。开发团队与社区和商业合作伙伴合作,为 ArduPilot 增加功能,使每个人都能从中受益。虽然 ArduPilot 不制造任何硬件,但 ArduPilot 固件可在各种不同的硬件上运行,控制各种类型的无人驾驶飞行器。与地面控制软件配合使用,运行 ArduPilot 的无人驾驶飞行器可以具备高级功能,包括与操作员进行实时通信。ArduPilot 拥有一个庞大的在线社区,致力于帮助用户解决各种疑问、问题和解决方案。

硬件 是外围传感器、控制器和输出设备,它们就像载具的眼睛、耳朵、大脑和手臂。 几乎任何移动设备都可以变成自动驾驶载具,只需在其中集成一个小型硬件包即可。硬件包首先是一个控制器。 利用传感器的输入,控制器能够向电调、舵机、云台和其他外围设备发送输出。 
|
固件 是控制器上运行的代码。您可以选择与载具和任务相匹配的固件: 旋翼飞行器, 固定翼飞行器, 无人车UGV子系统,或 天线跟踪器. 任君选择--一种(飞行)控制器适用于任何任务。 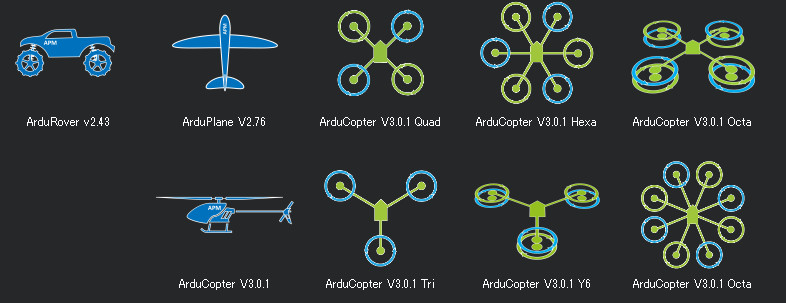
|
地面控制站 (GCS) 是您与控制器的接口。各种版本的 GCS 软件可用于 Windows、Linux 和 Android 平台。 GCS 允许用户对飞行器进行设置、配置、测试和调整。高级软件包可实现自主任务规划、操作和任务后分析。 Mission Planner地面站 是 ArduPilot 支持的全功能 GCS。它提供与硬件的点选式交互、自定义脚本和模拟功能。 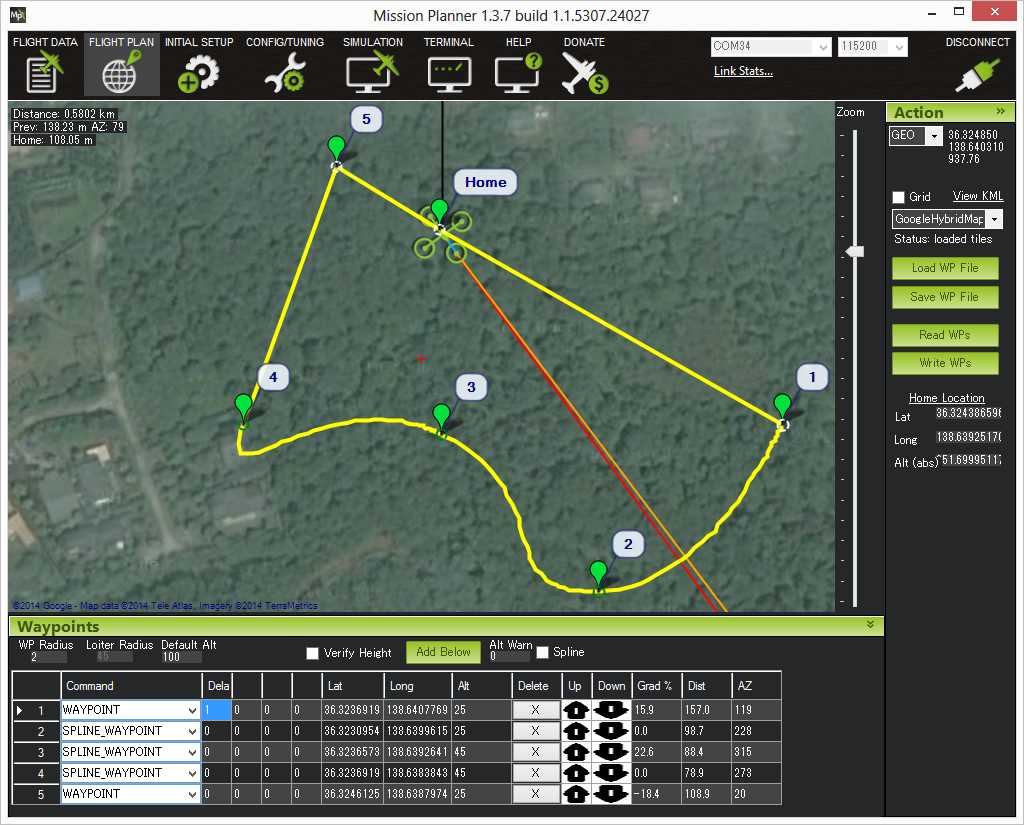
|
ArduPilot 文档¶
有关 ArduPilot 文档的链接,请参见边栏。
快速入门¶
在左侧选择您的载具类型
为应用选择 "(飞行)控制器硬件 "和 "外围硬件
按照载具的 "首次设置 "安装固件和地面站软件、连接组件和校准步骤
准备 "首次飞行(/驾驶)" 完成首次飞行/驾驶前的设置
高级配置可设置固件和硬件外设的更多高级功能
条例¶
每个国家对遥控和/或自动驾驶载具的操作都有不同的规定。 该数据库 但每个操作员都有责任了解和掌握当地、地区和联邦法规。
社区¶
提示
了解最新的 ArduPilot 相关博客,请访问 ArduPilot.org!
社区是 ArduPilot 与市场上许多其他产品的真正区别所在。以下是一些可以找到 ArduPilot 用户和开发者的地方:
开发者社区¶
开发人员聊天 正在编写代码?在 Discord 上向团队提问。
开发人员指南 开发人员指南》中提供了有关 ArduPilot 开发的所有信息。
我们每周 会议时间.
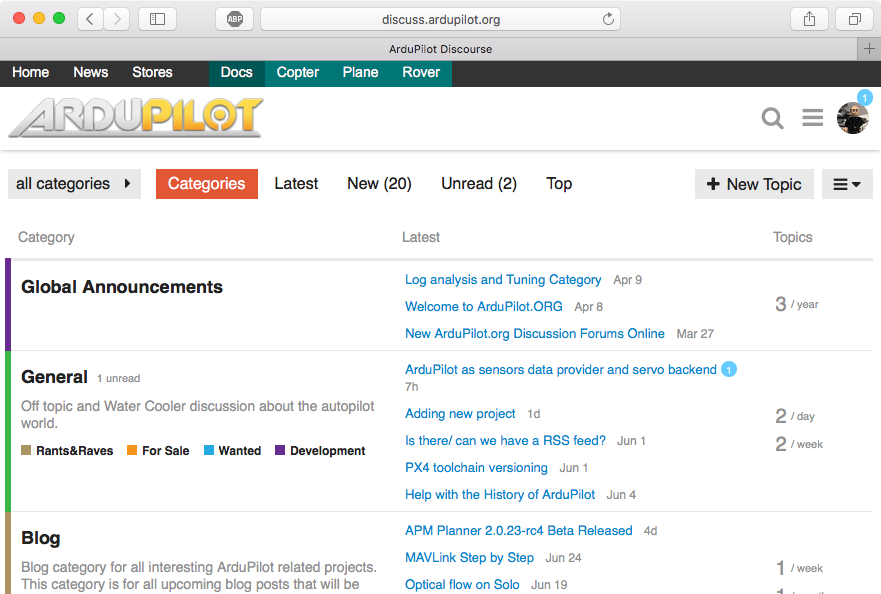
我们还有 论坛
历史¶
DIYDrones 社区为 ArduPilot 提供了最初的家园。从业余爱好者起步,ArduPilot 通过创建 DroneCode 引领了开源无人机社区的专业化进程。自2016年离开DroneCode后,ArduPilot进一步成长为一个独立、开放的全球项目。ArduPilot 功能的全面性和不断增长的列表源于社区的需求--无论是业余爱好者、商业用户、学者还是大型企业。查看 ArduPilot 的历史 了解更多信息。
特点¶
|
|
最后一次构建 2024 年 6 月 05 日