遥测转发¶
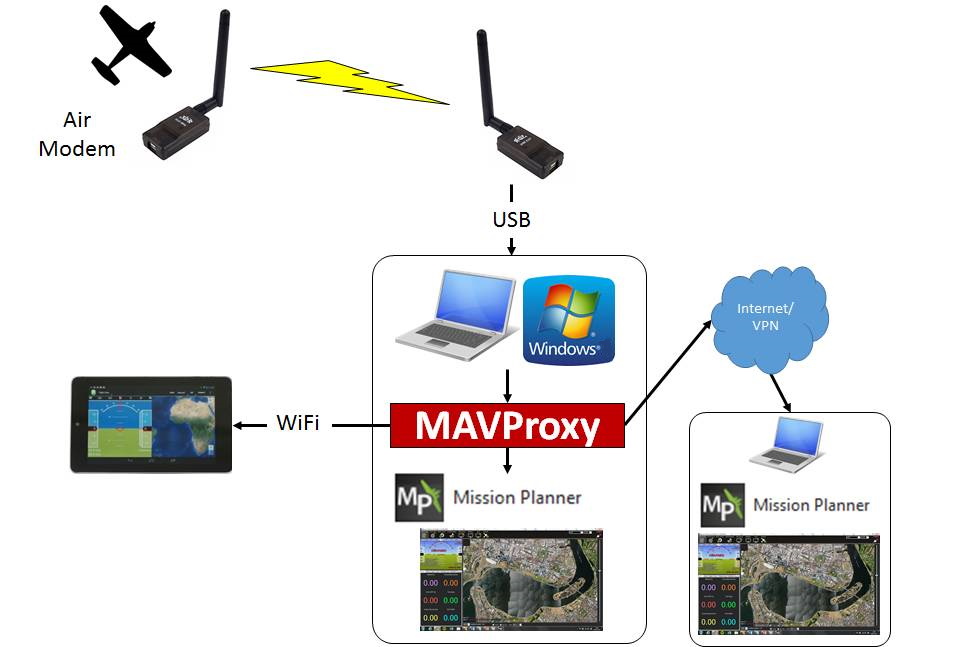
MAVProxy 的一个主要功能是能够通过 UDP 将无人机的信息通过网络转发到其他设备上的多个地面站软件。例如:您可以在天线旁边的笔记本电脑上运行一个地面站,并通过 Wifi 转发到智能手机/平板电脑上,这样您就可以在返回固定天线之前轻松转移到风中发射。您还可以用它向几公里外担任观测员的朋友发送遥测数据(通过 4G vpn),这样他就可以监控整个飞行过程,并确定在哪里可以找到飞行中的飞机。
要将 MAVLink 数据通过网络转发到电脑上的本地程序,只需在通过命令行启动 MAVProxy 时添加一些额外参数即可。
本地转发¶
要连接本地地面站软件(如 Mission Planner 或 QGC),请在 Linux 下使用命令启动 MAVProxy:
mavproxy.py --主人=/dev/ttyACM0 --波特率 115200 --退出 127.0.0.1:14550
缩略版也可以:
mavproxy.py --退出 127.0.0.1:14550
因为 MAVProxy 会自动连接 Linux 电脑上的(飞行)控制器。
对于 Windows 电脑,启动命令提示符并输入
mavproxy --师=COMx --向外 127.0.0.0.1:14550
其中 COMx 是(飞行)控制器连接的 COM 端口。
然后打开地面站软件,选择 14550 端口的 UDP 连接。然后它就会连接到您的无人飞行器。
转发到遥控器¶
备注
虽然 MAVProxy 也能使用 TCP 进行转发,但不建议使用,因为如果使用操纵杆控制,网络延迟会导致长时间滞后。
最后,您可以添加任何计算机的 IP 地址,以便将遥测数据流转发到其他地面站。
在本地网络/无线网络上,您需要确保客户端电脑上没有防火墙阻止向地面站软件输入数据流。
加 - - 出 目标 IP 地址:14550 添加到 MAVProxy 命令的末尾。您可以根据运行的额外地面站数量添加任意多个单独的 - -out 参数。
将每个地面站设置为监听 14550 端口的 UDP 数据包,并再次确保其防火墙未阻止 UDP 14550 端口的传入流量。