振动阻尼¶
(飞行)控制器具有对振动敏感的加速度计。这些加速度计值与气压计和 GPS 数据相结合,用于估算飞行器的位置。如果振动过大,估算值就会发生偏差,从而导致依赖精确定位的模式(例如在 Copter 模式下)性能极差:AltHold、Loiter、RTL、Guided、Position 和 Auto 飞行模式)。
请参阅 测量振动 有关如何测量载具振动级别并确认其在可接受范围内的详细信息,请参阅第
减振的目的是减少高频和中频振动,同时仍允许低频实际板运动与机身协调进行。
双面泡沫胶带或尼龙搭扣历来用于将(飞行)控制器固定在机架上。在许多情况下,泡沫胶带或尼龙搭扣无法提供足够的隔振效果,因为(飞行)控制器的质量非常小。
备注
本文中的示例和图片指的是 Copter,但这些信息在很大程度上也适用于 Plane 和 Rover。
3M、Du-Bro 或 HobbyKing 泡沫塑料¶
应将以下三种泡沫中的一种切割成 1 厘米至 2 厘米的小方块,并按照(飞行)控制器上的说明分别粘贴在(飞行)控制器的四个角上。 安装(飞行)控制器维基页面:
- 3M 泡沫塑料双面均有粘性,并已预切,因此可轻松将单个方块粘贴到(飞行)控制器上
HobbyKing 橙色泡沫 (停产)
后两种方案需要使用 "地毯固定胶带 "将泡沫固定在(飞行)控制器和载具框架上。

凝胶垫¶
将推荐的凝胶剪成 1 厘米至 2 厘米的正方形,贴在(飞行)控制器的每个角上。可使用的凝胶包括
Kyosho Zeal 胶带 性能最佳,可从亚马逊、E-Bay 和 A-Main Hobbies 购买。
月球凝胶垫 (也可在音乐商店购买)。注意事项:月光凝胶在华氏 100 度以上的高温下会失效,因此应谨慎使用。
用 1 厘米宽的魔术贴固定带或橡皮筋将(飞行)控制器固定在机架上。注意固定带不要将控制器固定得太牢,以免影响减震垫的阻尼效果。可以考虑在固定带和(飞行)控制器之间加一层软泡沫。
安装在中间平台上的 FlameWheel F330 和 PX4FMU¶
博客 在 ArduCopter 上测试 GoPro 的简单防震解决方案 有一段视频演示了在 Go-Pro 摄像机上使用 Moon Gel 进行振动隔离。
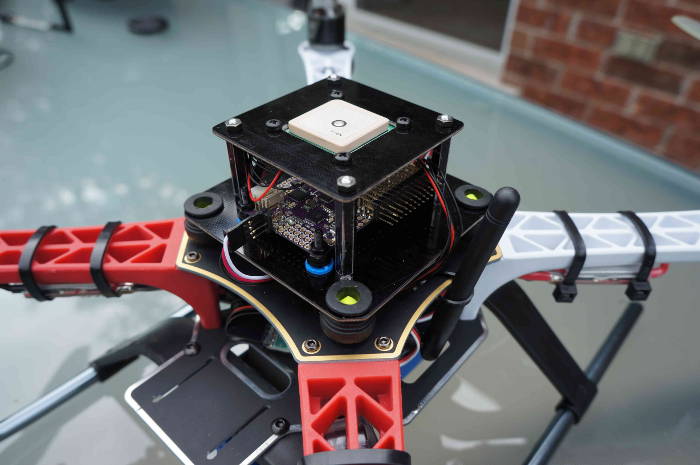
三维打印防震平台¶
GuyMcCaldin 的 3D 打印振动支架在 Thingiverse 使用 这样的阻尼器.
安装支架时可使用双面胶带或 M3 螺丝。
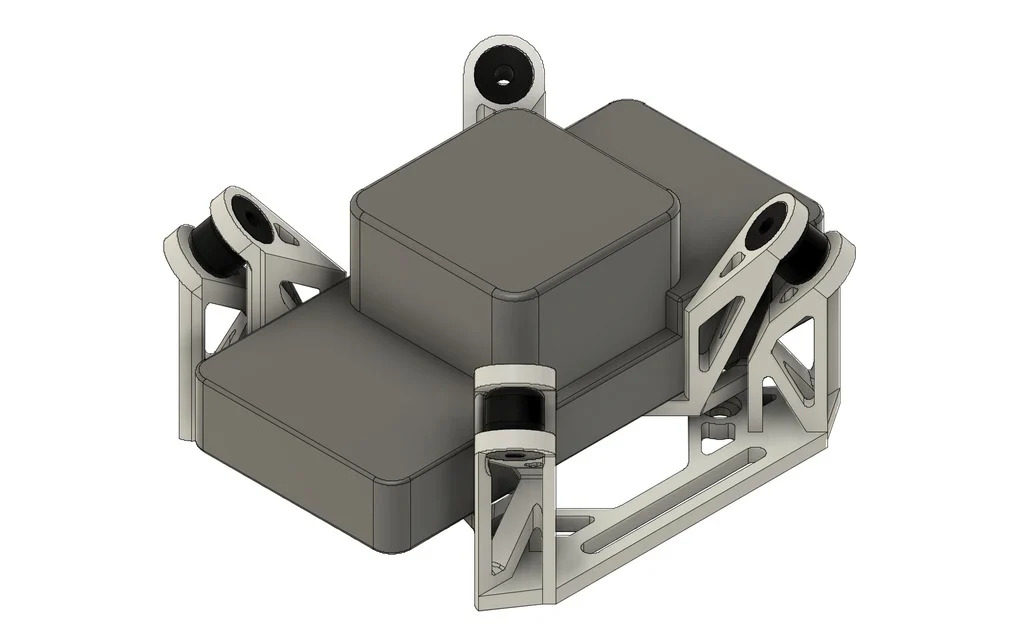
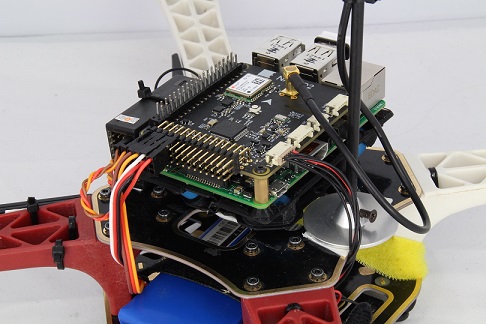
用于 NAVIO2 的 3D 打印防震平台¶
用于 NAVIO2 的防振装置可以轻松地 3D 打印出来。它大大简化了安装过程并消除了振动。您可以找到 STL 文件 这里.
通过安装在框架上的 Navio2 抗震:
O 形环悬挂架¶
创建一个平台,在四个角上打孔或拧螺丝,将(飞行)控制器安装在上面。用双面泡沫胶带将(飞行)控制器安装在这块板上。
在机架顶部安装 4 个支座,间距比安装控制板的平台宽度大 1/10 英寸至 1/8 英寸。
将 1/16 英寸尼龙 O 形环插入(飞行)控制器的每个角和支座,这样(飞行)控制器就不会与机架硬连接。链接 (这里!)
选择的 O 形圈总直径应能牢牢地固定电路板,同时又能使电路板在初始阶段有轻微到中等程度的移动,但移动速度很快(一般为外径 1/2 英寸到 3/4 英寸),如果能买到硅树脂 O 形圈,其阻尼效果一般会比丁腈橡胶 O 形圈(尺寸 15 - 21)好。
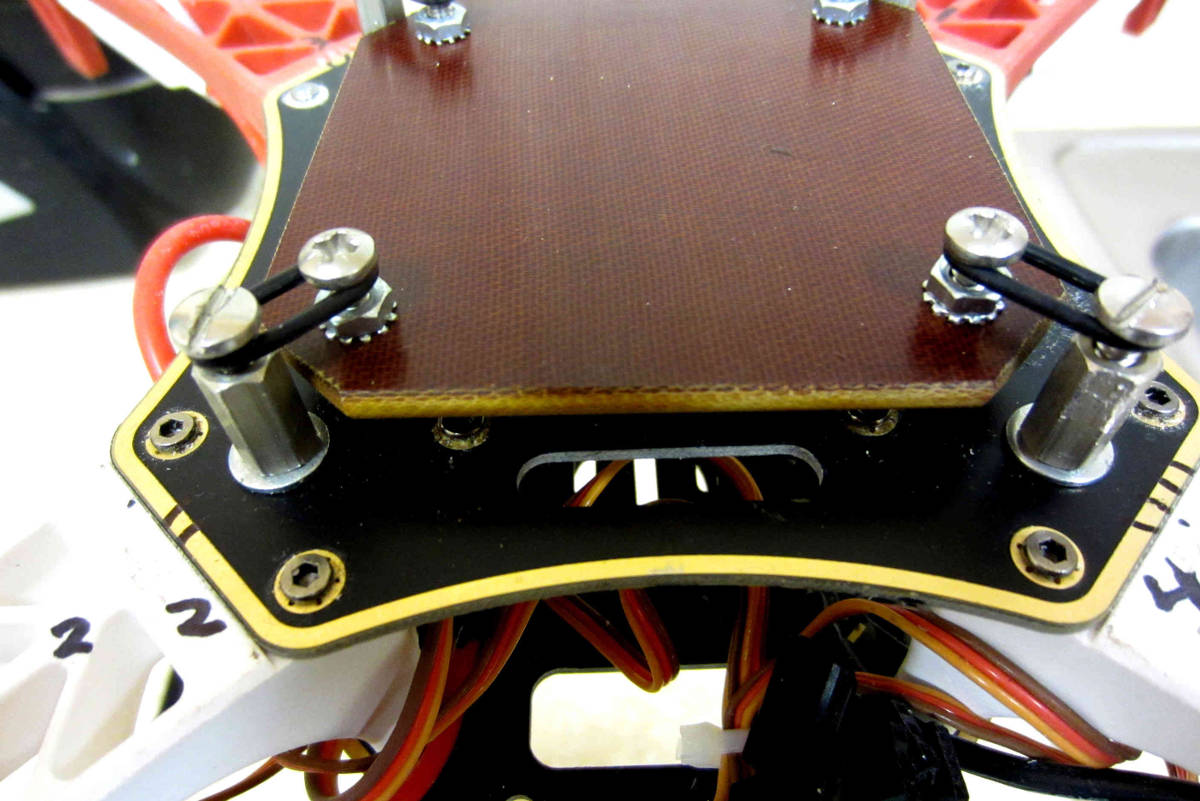
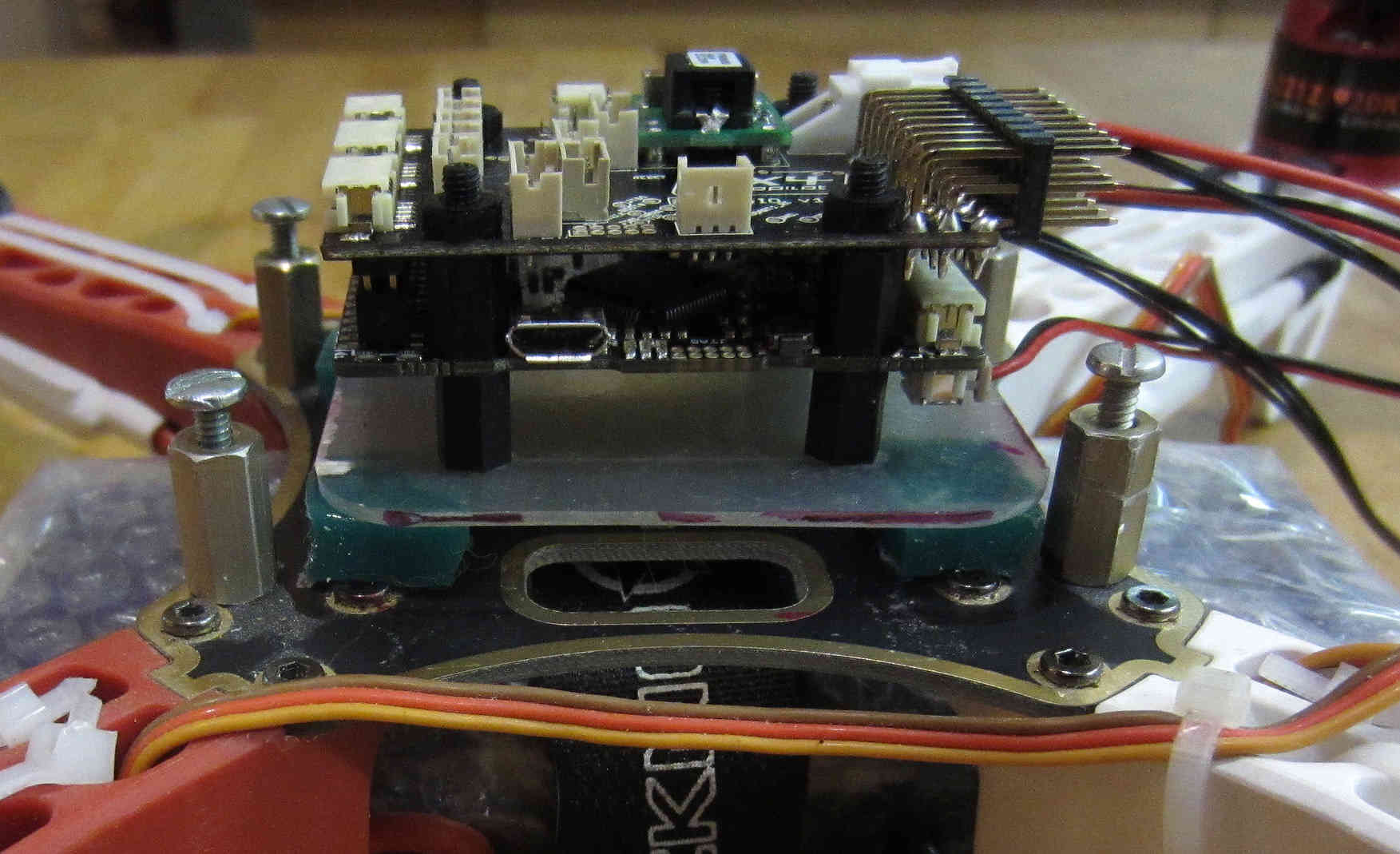
FlameWheel F450 O 型环悬挂平台固定装置¶
振动是短耦合的,因此留出多余的转角间隙只会要求更高的初始 O 形环张力,从而降低减震响应性,并使电路板的物理倾斜度更大(这是不可取的,因为这会使传感器与机身的关系发生偏差)。
与凝胶垫相比,O 型环悬挂系统的缺点是机械结构更为复杂,而且需要调整 O 型环的直径和横截面。
通过使用中间板,您可以将 O 形环和凝胶垫设计结合起来,享受双重阻尼效果。
耳塞座¶
购买反应缓慢的硅胶、聚氨酯泡沫或聚氯乙烯泡沫耳塞,如 这些来自 3M.
制作一个安装(飞行)控制器的平台,在四个角上开孔。孔要足够大,以便塞入耳塞,但又不能太松,以免在着陆时板子松动。确保孔洞平滑,以免割伤耳塞。孔还应尽可能靠近电子模块板的四角,以减少不必要的模块移动。
用双面泡沫胶带将(飞行)控制器安装在这块板上。板上增加的质量可改善减震效果。
将耳塞穿过框架上的现有孔(或新开的孔)和安装(飞行)控制器的电路板上的孔。通过改变耳塞中间露出的部分,可以实现 "飞行稳定调整"。
耳塞振动装置¶
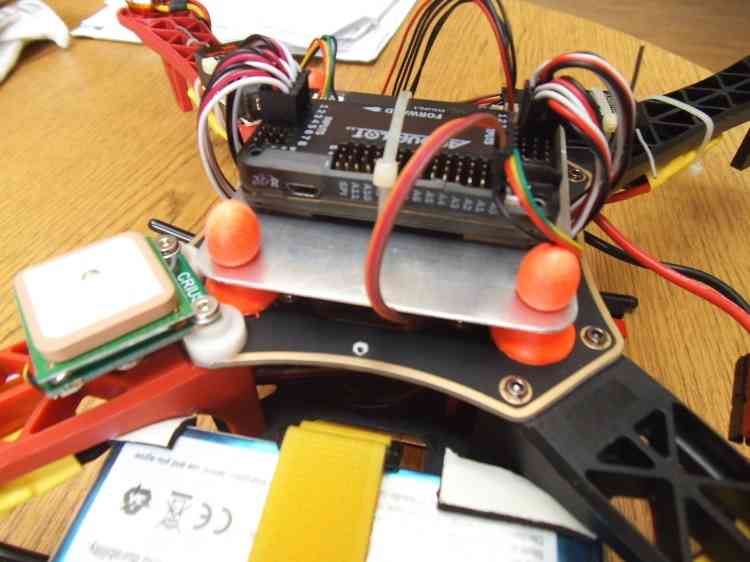
灯泡阻尼器 + 耳塞式振动支架¶
安装板的每个角都有一个 100 克重的软橡胶球型 "万向 "阻尼器,每个阻尼器内都有一个半聚氨酯泡沫耳塞。
万向球型阻尼器本身可以在拉伸或压缩状态下工作。
耳塞提供了一种额外的阻尼介质,其频率阻尼范围与灯泡阻尼器本身不同。
耳塞还能使灯泡支架更加坚固,防止正常飞行动作造成过度的自由运动。
这成功地将带有柔性臂和超大型 12" 螺旋桨的火焰轮克隆机阻尼到 0.05 G 范围内。
(飞行)控制器还安装在防震扣环上,可从以下网站购买 麦克马斯特-卡尔 (建议每套 25 件,部件号 9311K64)。
100G 灯泡型万向节减震器可直接向各种供应商订购: copter-rc.com
减少振动的建议¶
对于旋翼机来说,最大的振动源通常是叶片经过机臂,但也存在其他振动源,遵循本建议可减少振动:
机架弯曲,尤其是机臂弯曲,是造成不同步振动的主要原因。
原装的 DJI Flamewheel 无人机有足够坚硬的注塑臂,而许多克隆机则没有。
铝合金或碳纤维臂的扭曲和弯曲较少,从而减少了振动
像 Iris 这样装有注塑外骨骼或手臂的旋翼飞行器具有足够的刚性
便宜、轻巧的机架往往比高质量、坚固的机架更容易弯曲,而且旋翼飞行器的负载越重,弯曲程度就越大(这可不是什么好事)。
电机与车架臂、车架臂与中央轮毂之间的固定装置必须牢固且不会弯曲(碳管臂有时会出现问题)。
电机需要运行平稳(轴承没有磨损或发出 "刺耳 "的声音)
连接螺旋桨和发动机的螺旋桨适配器必须同心且非常直
螺旋桨应使用良好的手动螺旋桨平衡器进行全面平衡
电动机平衡(或像 T-Motor 这样的真正的工厂平衡电动机)可产生重大影响
如果螺旋桨与机架和重量不匹配,或者在 CCW 和 CW 方向的弯曲度不一样,就会造成很大问题
好的螺旋桨振动更小
碳纤维螺旋桨刚度高,振动小,可减少振动,但非常锋利,有很大的安全隐患。
应减振的振动摘要¶
我们主要需要降低的振动频率和振幅是发动机/螺旋桨装置以飞行速度转动时产生的振动。
也就是说,它的频率相当高,振幅相当低。
这就要求我们提供较短的耦合阻尼和隔离范围。
电路板本身不需要有超过振动幅度的运动范围,也不需要从中受益。
由于滑板不会对机身施加任何力,因此我们唯一需要关注的阻尼/隔离就是滑板本身的重量(质量)加上机身正常飞行操纵时施加给它的力。
由于我们可以获得出色的宽频率范围、高阻尼材料,因此我们最关心的是如何使用适量的材料来优化(飞行)控制器的阻尼(过多和过少一样糟糕)。
将(飞行)控制器和接收器合并到一个单独的减震电子模块 "板 "或外壳上,可以增加模块的质量,使其更容易有效减震,同时减少相互连接的线路,使整个系统更加模块化。
减少振动的其他考虑因素¶
硬盘驱动器防震垫圈可提供足够的或补充的减震效果
通过对连接到(飞行)控制器的所有电线采用高柔性电线和应力消除方法(以及使用所需的最少电线数量),还可显著提高隔振效果。
由于机架刚度/挠度和孤立的集中质量,一些机架的振动特性低于正常水平,这在很大程度上会影响电机/螺旋桨振动向中央战斗控制器的传递。
将(飞行)控制器/机箱夹在两侧减震垫之间,压缩约 20%,可以在一定程度上改善隔离和阻尼效果。为了获得最佳阻尼效果,30 硬度的山伯玢实际上被规定压缩 15% 到 20%。
虽然硬度为 30 的 Sorbothane 似乎是一个很好的选择,但经验表明,它会永久压缩,在减震方面不如凝胶解决方案有效。
博客链接介绍了首个实现 0.05 G 阻尼(2013 年 2 月 20 日改进为 0.02 G)的 APM 防震安装系统,这是一种双区隔离系统,结合了 O 形环悬挂装置和硅胶垫。 (这里!)
电机平衡也可以减少振动,尤其是对于价格较低或较大的电机。平衡包括
在电机上紧紧系上一条小拉绳(不带撑杆),微调掉伸出的拉片,然后旋转起来。
尝试多次,每次都将电机外壳上的绑带转动一下,直到振动减少或消失。
如果需要或用于较小的电机,可以用一小块苏格兰胶带代替扎带重新定位。
当您找到振动最小的位置时(您应该能听到振动),用毛毡笔在领带扣正下方的位置做上标记。
在绑带扣的位置涂上一小点热胶枪胶水,然后每次增加一点胶水,直到振动减到最小。
如果胶水涂得太多,可以用 X-acto 刀去除。
摄像机支架也需要有效地隔离和减震,但它们已经有了许多 "软 "安装解决方案。
摄像机舵机也需要隔振,要么安装在隔振的摄像机支架上,要么使用自己的减振解决方案。
相机舵机臂上应使用高质量的球形接头,支架本身应使用足够的轴承或衬套,以防止惯性滑动。
高质量、无游隙的伺服系统也是精确摄像的必备条件。
目前看来,机架的刚度越高越好,因为机架弯曲会在将电机诱导的动作转换到位于中央的(飞行)控制器时产生不良的机械延迟(滞后)。(不要冲击安装电机臂)。
阻尼介质的数量和类型需要与我们试图隔离的物品的重量(质量)以及我们试图阻尼的振动频率和振幅仔细匹配。我们要隔离的(飞行)控制器重量不到 2 盎司,质量非常小。
实际上,所有现成的解决方案(无论是垫式还是螺柱式)都是针对独立质量而设计的,其重量至少是普通(飞行)控制器重量的 5 到 10 倍,这样才能达到最佳效果。这包括所有预制的 Sorbothane、Alpha 凝胶、EAR、记忆泡沫或其他硅胶或聚氨酯凝胶或泡沫支架以及 Lord Micro 支架。
为承受正常飞行压力的(飞行)控制器或电子模块的质量而适当设计的螺纹螺柱或套筒式安装凝胶座,将是更好的长期解决方案。
术语¶
使用的方法通常包括阻尼和隔离:
隔离 是简单的无阻尼(弹簧或橡皮筋支撑),可使孤立物体的运动与包含物体的运动基本分离(例如载具弹簧)。
阻尼 是指通过减震介质(如载具减震器)将振动转化为热能。