典型(飞行)控制器接线连接¶
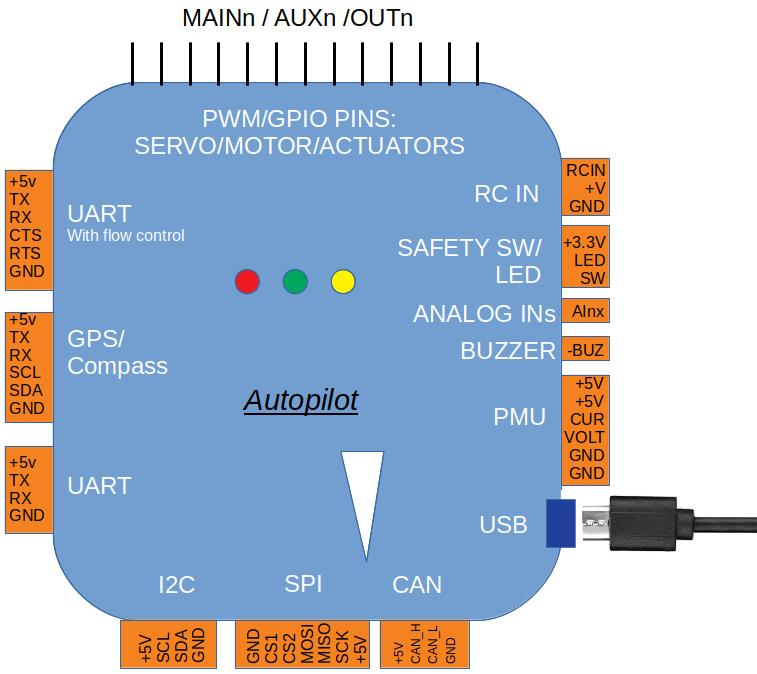
本主题涵盖(飞行)控制器基本/必备外围设备的布线/连接。有关每个(飞行)控制器端口/连接器的详细说明,请参阅 (飞行)控制器输入和输出
全球定位系统/指南针¶
GPS 通常是所有载具的必备功能,除非有其他定位功能。 使用的传感器或系统.Copter 和 Rover 以及 QuadPlane 平面类型通常也需要指南针(见 无罗盘操作 指南针替代品),但不适用常规飞机,不过建议使用。
备注
某些 Copter 和 Rover 模式可以在没有 GPS 和指南针的情况下运行(有关飞行模式,请参阅载具文档)。
系统中可使用多个 GPS 和/或指南针,请参见 GPS 混合(又称双 GPS), 高级指南针设置和 EKF3 耦合力和车道切换 更多信息
备注
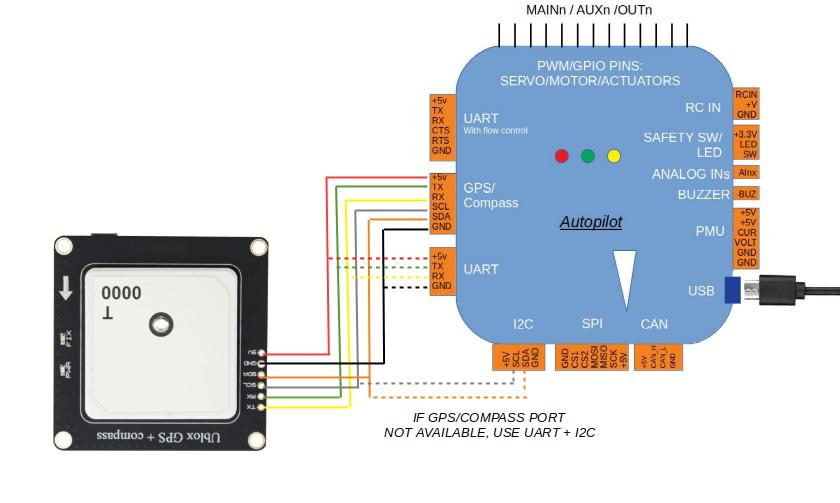
TX 和 RX 从(飞行)控制器切换到 GPS 模块。
备注
通常,GPS 默认连接到 ArduPilot 的逻辑串行端口 3。不过,(飞行)控制器上的 ArduPilot 串行端口 3 分配给哪个物理 UART,在(飞行)控制器的 文献资料
备注
重要的是,GPS 必须连接到第一个 SERIALx 端口,该端口有 SERIALx_PROTOCOL 参数设置为 "5"(GPS),因为如果在为 GPS 协议配置的第一个端口上未找到 GPS,它将在启动过程中停止搜索 GPS。
以接线为例 3DR UBlox GPS + 指南针模块 演示了如何连接 Pixhawk (飞行)控制器,还包括其他配置和安装信息。
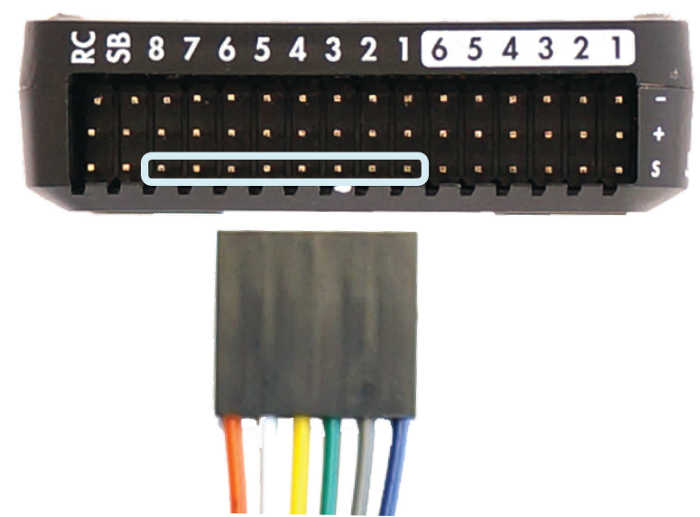
RC 输入¶
无线电控制接收器通常用于飞行员控制。虽然可以使用遥测技术通过地面站对飞行器进行独家控制,但不建议这样做。(不过,可以通过地面站软件使用操纵杆控制飞行器。参见 操纵杆.
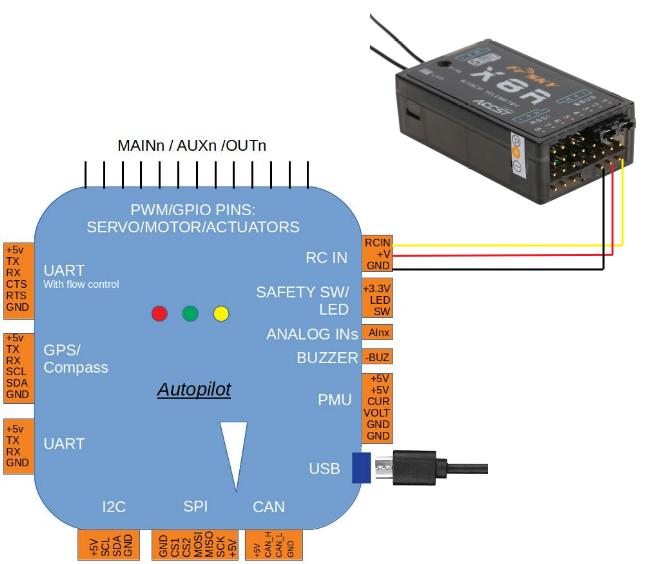
ArduPilot 可自动检测以下串行遥控接收器协议:
PPM 遥控 (R/C) 接收器
SBus 接收器
FPort 接收器(见 FPort 接收器 )
交叉火力(CRSF)和 ELRS 接收器(见 穿越火线和 ELRS 遥控系统需要完整的 UART 连接)。
Spektrum DSM 和 DSM2 接收机
Spektrum DSM-X 卫星接收机
IBUS 接收器
MULTIPLEX SRXL 版本 1 和版本 2 接收器。
对于传统的单线每通道 (PWM) 接收器,可使用 PPM 编码器将接收器输出转换为 PPM。
提示
从 ArduPilot 4.0 版固件开始,任何(飞行)控制器 UART 都可用作遥控接收器的输入,而不是指定的 RCin 或 SBUS 输入引脚,方法是设置该端口的 SERIALx_PROTOCOL 但是,某些串行协议需要反相(SBUS、FPort),UART 必须能够使用反相(SBUS、FPort)。 SERIALx_OPTIONS 参数来反转 RX 输入,否则将需要外部反相器。这样还可以将第二个遥控接收器连接到(飞行)控制器上,以实现冗余。如果第一个接收器(启动后检测到的第一个有效接收器)出现故障,则将使用第二个接收器。请注意,当第二个接收器激活时,将使用已校准的遥控输入范围和微调。两个接收器都必须设置为在故障安全状态下不发送脉冲,这样才能正常工作。 RC_OPTIONS 第 10 位也必须设置。
提示
有关兼容接收器及其连接方式的信息,请参见 无线电控制系统.另请参见 多个无线电遥控接收器 用于使用多个遥控接收器

FRSky Taranis 发射器¶
电机/伺服器连接¶
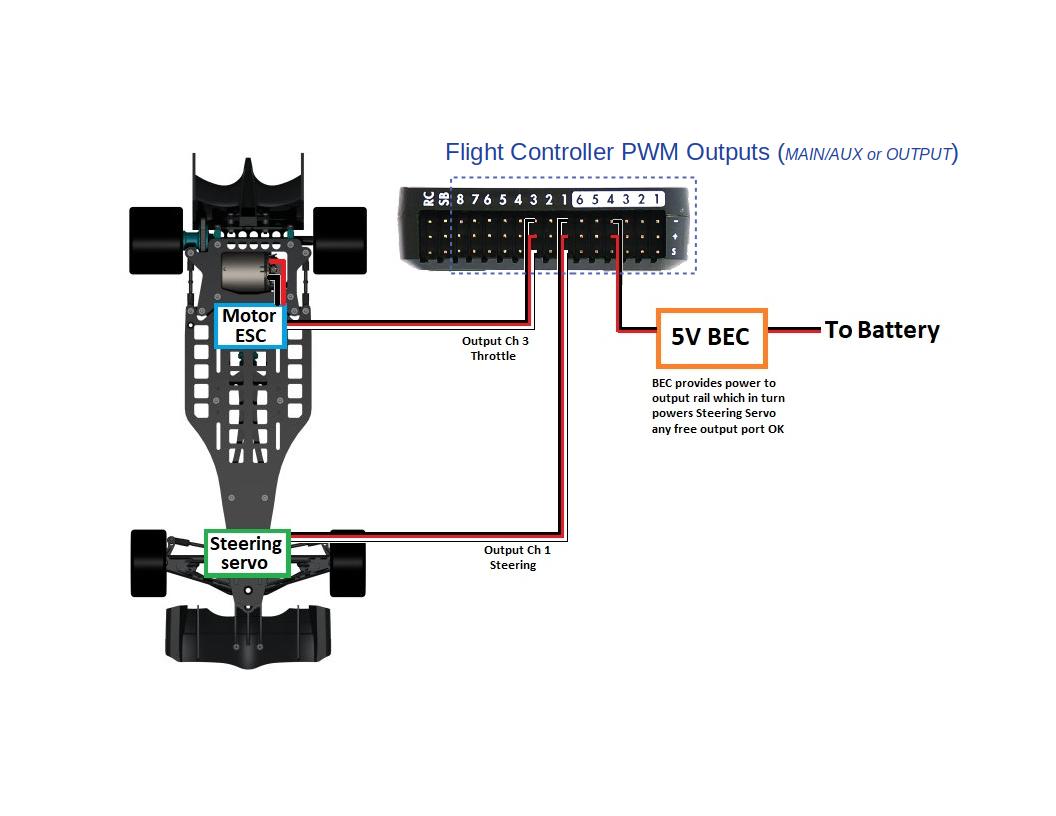
电机电调和(或)PWM 伺服电机连接到(飞行)控制器的 PWM 输出端。
它们被标为 MAIN/AUX 输出或 OUTPUT 输出。这些输出为电机电调或飞行表面伺服控制提供 PWM 或 Dshot 信号。有时,它们也可用作通用 I/O 引脚,用于控制继电器、降落伞、机械爪/机械手臂等。
带有 MAIN/AUX 输出标签的控制器通常表示使用了 IOMCU 协处理器。这些输出可用作电机/伺服输出,并在主(飞行)控制器发生故障时通过遥控提供冗余控制。主输出来自该协处理器,而指定的辅助输出则由(飞行)控制器直接控制。大多数板级(飞行)控制器不使用 IOMCU,其输出仅标有 OUTPUTx 或 Mx。
这一区别非常重要,因为 AUX 输出(以及不带 IOMCU 的(飞行)控制器的 OUTPUT)既可用作 GPIO,也可用作 PWM 或 Dshot。而主输出只能用于 PWM。
备注
一些不使用 IOMCU 的(飞行)控制器将其输出标记为 MAIN,因此实际上可以用作 GPIO 和/或 Dshot ESC 控制输出。例如 CUAV V5 Nano 和 Holybro Pixhawk 4 Mini。
这些输出通常由 3 针连接器提供,除了单独的输出信号外,还提供或分配伺服电源和接地。这种电源通常由外部提供,例如由电调或 BEC 提供,但有些(飞行)控制器也通过内部稳压器提供这种电源。
路虎的连接示例
仅使用电机的旋翼飞行器示例。在这种情况下,只连接电调信号线。
在平面上,将控制通道线与主输出信号引脚相连:
输出 1 = 副翼
输出 2 = 电梯
输出 3 = 节流器
输出 4 = 舵
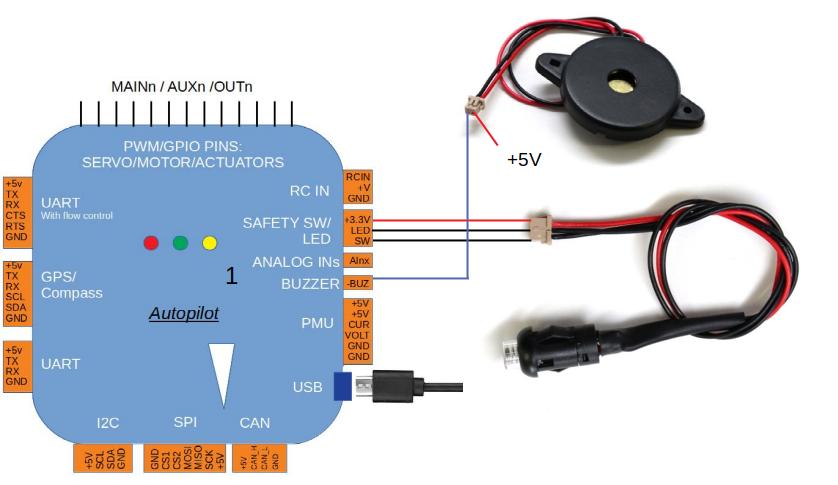
连接蜂鸣器和安全开关¶
蜂鸣器和安全开关按钮为可选项,但对某些配置非常有用。并非所有(飞行)控制器都提供这些连接。如图所示,蜂鸣器和开关可分别连接到各自的端口。
警告
将蜂鸣器安装在距离飞行控制器至少 5 厘米远的地方,否则噪音可能会干扰加速度计。
连接其他外设¶
根据硬件的不同,还可能连接其他外围设备,包括传感器、摄像头、机械手等。这些外围设备可以在主题的子页面中找到 可选硬件.
有关将这些外围设备连接到(飞行)控制器的信息,请参阅相关页面。