高质量 Bixler 1.1 版本(APM2.x)¶
这篇文章描述了一次精心策划的 Bixler 建造(作者:戴夫-史密斯)。

概述¶
我在互联网上看到过一些非常可怕的图片,图片中的 Bixlers 所有东西都是用胶带粘在外面的。通过在网上搜索,我找到了制造飞机所需的答案,但学习曲线非常陡峭。
希望我能帮助别人,记录下我的整个建造过程,让他们少走很多弯路。
设备清单¶
Bixler 1.1 ARF (HobbyKing)
电机 (HobbyKing)或其他 2216 型 800-1000KV 马达
ESC (HobbyKing)或其他 18-20A 电调
SBEC (HobbyKing) -(可选)5A BEC
电机支架 (HobbyKing) -(用于旋转更大的道具)
APM 2.6,带独立 GPS/指南针。(见下文说明)
无线电:Spektrum DX8 和 RX 或任何其他 5 通道或更高系统。
螺旋桨APC 8x4E 。可使用推杆或拉杆,因为只需交换电线即可轻松改变马达方向。
Y 型伺服电缆将两个副翼伺服器连接到一个(飞行)控制器输出端。
备注
该(飞行)控制器已不再支持。查看当前的(飞行)控制器 清单.OmnibusF4 Pro V3 是一种廉价的替代品。任何 UBLOX MN-8 级 GPS(如 BN-220)都能很好地工作。在飞机上使用 ArduPilot 不需要指南针(有 GPS/ 指南针组合部件)。
入门¶
关于使用外部 SBEC:我之所以选择这样做,是因为我是一名遥控旋翼飞行器驾驶员,经常使用电流大得惊人的舵机。
如果您将舵机与电调内置的 BEC 分开供电,那么任何一个舵机因电流过大而关闭的可能性都会降低。
但同时也增加了一个可能发生故障的电子设备。
当马达处于最大油门,舵机完全偏转时,例如在大风天,独立的 BEC 可为您提供一些余量。
市场上有一些体积更小、价格更低廉的 BEC,占用的空间比我图中的要小。
这完全是可选项。在此应用中,电调的 BEC 可以可靠地正常工作。
为电调编程¶
使用电调的设置说明,将电调的低电压切断设置为最低,以便(飞行)控制器的电池电量故障安全功能发挥作用。(请务必启用该功能)
不用担心电机方向;如果电机反向旋转,只需调换两根电机导线即可。
按照 电调设置指南 校准电调
电调和 BEC 的接线¶
我选择使用 EC3 连接器,因为我所有的电池都有这种连接器。XT-60 也不错。
如果不使用外部 SBEC,请跳至最后一步。
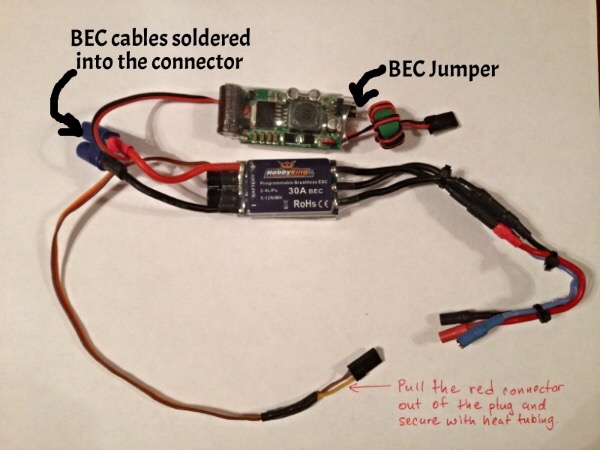
从电调 BEC 的连接器处切断中央伺服电源线。
将 SBEC 电源线和 ESC 电源线一起焊接到连接器上(这可能有点麻烦)。#.将连接器中的焊锡烧热,然后插入一根电调导线。#.保持连接处的热度,然后将 BEC 电源线滑入旁边的连接处。
我选择从 SBEC 以 5V 电压运行伺服系统。#.它的末端有一个跳线,可让您选择 5 或 6 V。#.在重新安装电子元件之前,用一团热胶或鞋胶固定 SBEC 上的跳线。
从电调接收器连接器上拔出中心(红色)针脚和导线。#.这将断开内置 BEC 与电调的连接。因为我们使用的是单独(专用)的 BEC,所以不需要它。#.将电调的 BEC 线用热缩管塞住。#.如果需要对电调重新编程,您将需要使用它。
添加 100 毫米 14 号电机引线延长线,带 3.5 毫米香蕉插头,以便日后为 Bixler 电机接线。
准备就绪:
设置(飞行)控制器、传感器和可选设备¶
本文的目的是详细介绍飞机的制造,而不是 APM。维基上有许多关于 APM、传感器和调试的文档。 飞机漫步 .
安装(飞行)控制器并接线¶
用 5 毫米胶合板(或塑料板或玻璃纤维板)为(飞行)控制器制作一个 45 x 100 毫米的安装板。
在(飞行)控制器的每个角下使用 1 英寸见方的 Kyosho Zeal Gel 或 Dubro 泡沫,以提供振动抑制。
Zeal 有高强度双面胶,但如果你的焊盘没有,可以考虑使用亚马逊或 Lowes 上的 "焊工胶"。
关于焊工胶:这是一种接触胶。轻轻涂抹在要粘合的每个表面上,让其干燥约五分钟。
然后小心地将两个表面对齐,并立即粘合在一起。
我还将使用焊工胶水来组装泡沫塑料空气框架,并在机身上建造一个检修门。
安装在板上的 APM (飞行)控制器:(图中是连接 GPS 的电缆。实际上,我使用了更长的 30 厘米电缆)

准备机身¶
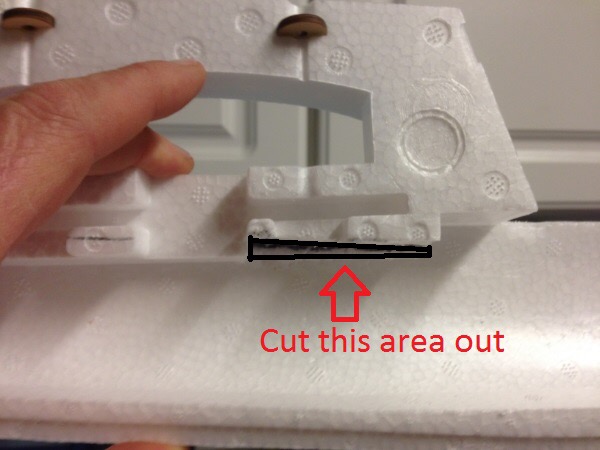
在这次建造中,APM 是倒置安装的,我们希望让它与机身持平(与飞行线持平)。
可以看到,当 APM 保持水平时,机翼的攻角为正。
如果只是将 APM 固定在机身底部或顶部,它将无法保持水平,但如果将 "LEVEL"(水平)位置设置为机翼有几度攻角,则可以得到补偿。 加速度计校准.
我去掉了机身顶部内侧下方的一些泡沫,以便使 APM 水平:
组件安置¶
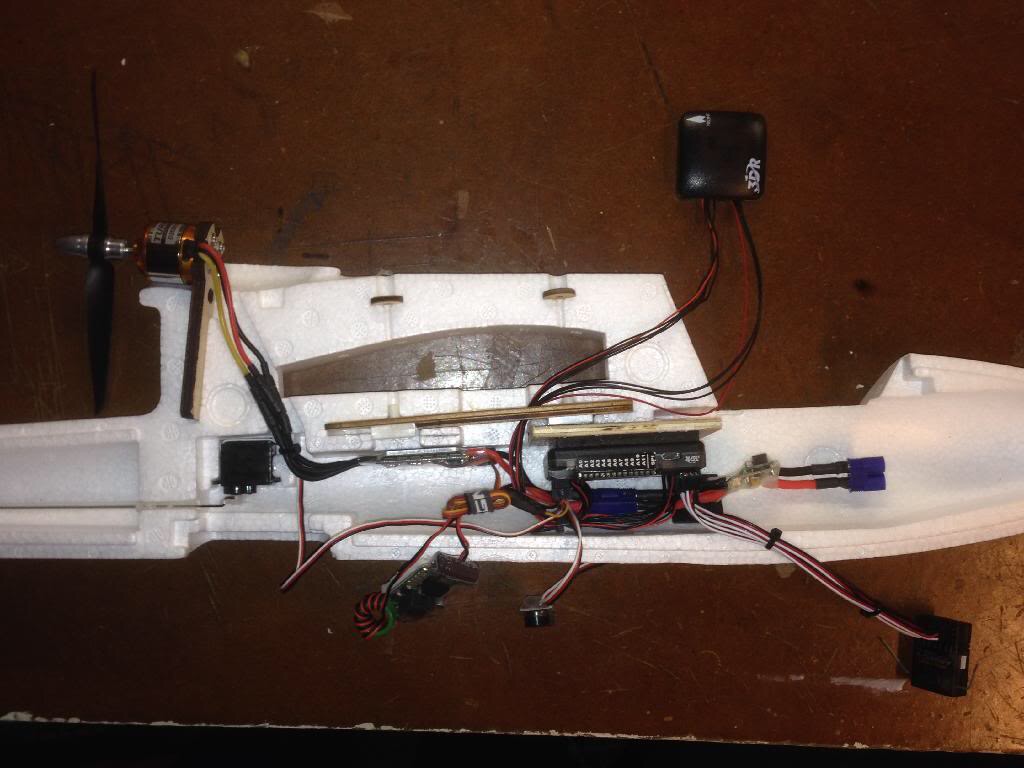
下面是已安装到位的 APM 和部分组件。
此时,您应在检修面板的位置做上标记。
修整机身¶
我原来剪得太多了,机身真的很薄弱。
没问题,用热胶就能轻松解决任何问题。
在下图中,你要剪掉下半部分,留下我标注为 "不要剪 "的区域。
您将有足够的空间访问 APM 输入和输出以及 USB 端口和其他引脚。
直接切开泡沫,这样面板就能轻松打开。

现在将两半对齐,标记出右侧的切口。
从机身的另一半(右侧)切割出一个较大的检修面板,以便您可以检修 APM 上的 USB 端口。
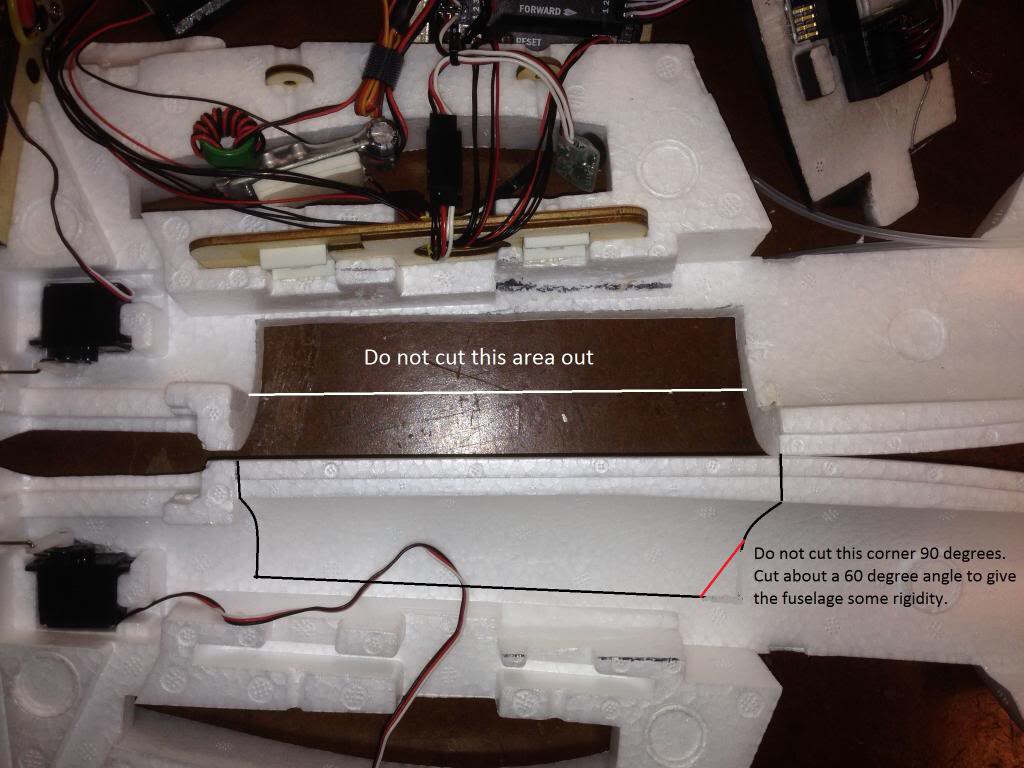
沿着我们已经切割出的大面板的长轴切一个斜面。
我认为我下面的图片不正确;在面板上的这个切口是从 机身右半部.
这不是两半机身连接处的边缘,而是靠近机翼的切口。
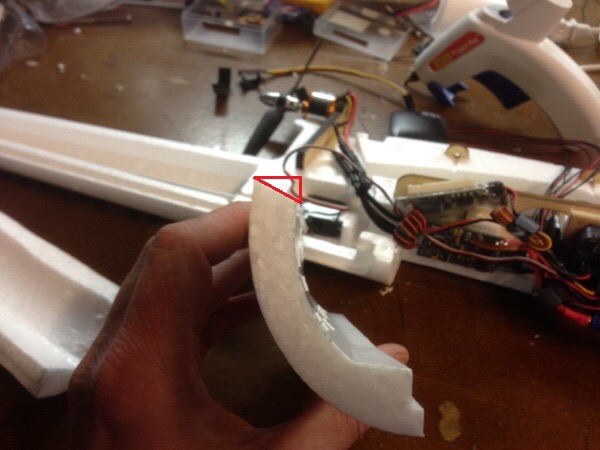
现在,在斜面(我们刚刚切割的斜面)与机身的连接处用焊工胶水做一个铰链。
这样就为面板创建了一个隐形的超酷铰链。
别担心,定制泡沫飞机使用这种铰链进行了数百次飞行。
这里有一个 链接 观看 YouTube 视频,了解如何制作焊工铰链:
焊接铰链完成后,面板应该是这个样子:

组装机身¶
所以,我现在要快进一点。
按照 Bixler 的说明,将两半机身粘在一起。
同样,我使用焊工胶水,在每一半上涂上细细的胶珠,让它们变得粘稠,然后将两半组装起来。
在组装两部分之前,将电机电缆从电调连接到电机。
如果没有,也不用担心,但可以省去用尖嘴钳和止血钳连接电机引线的麻烦。
您还应该检查电机的旋转情况,这样就不必为反向旋转的电机切换电机引线。
组件安装细节¶
下面是粘合在一起的机身和粘合到位的部件。
我喜欢用热胶来处理这个细节。
请注意,我在检修舱门上横粘了一根 3 毫米的碳纤维杆,以增加刚度。
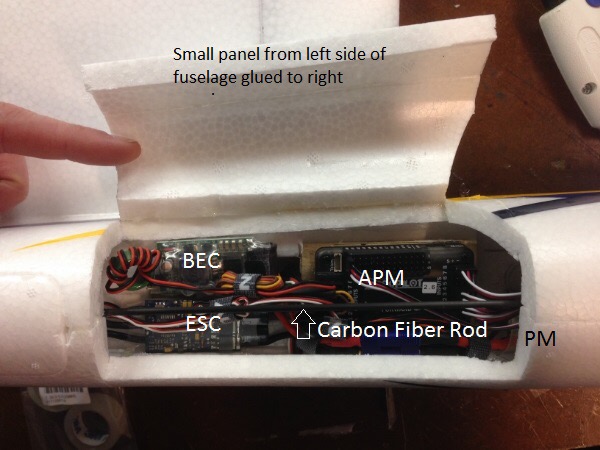
此时,空间已成为一个问题。使用较小的 BEC 将对您有所帮助。
你会注意到,到目前为止,我们还没有在机头上放置任何东西,所有部件都紧紧地缩在机翼下。
我这样做是为了让我们在未来的构建中使用更大的电池。
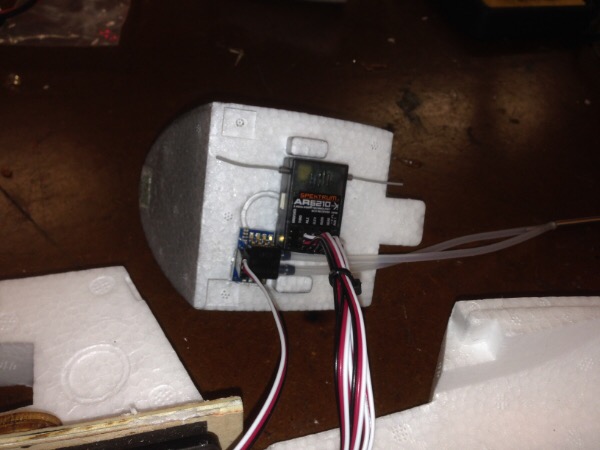
这次我使用的是空速传感器,建议您使用,但如果您是第一次使用,则没有必要。
为了给电池腾出空间,我将空速传感器板和接收器安装到了舱盖舱门的底部:
完成施工¶
为副翼使用 Y 伺服器分路器电缆,尽管使用独立的(飞行)控制器输出可以使用 飞翼.
我对这种设置非常满意,因为使用 Zippy 3s 2200mAh 锂电池可以获得完美的 CG。我最多可以使用 3000 毫安时的电池。
我将 GPS/指南针安装在右翼上,只去掉了一小部分材料。
把它放在机翼的高处并不理想,但我想让它远离机身和所有载流电子设备。最终,我将电缆沿着碳纤维杆铺设到机翼下方,这样就顺畅多了。如果不使用指南针,GPS 可以安装在任何地方,只要其上表面(天线)朝向天空即可。
调试和飞行性能¶
为了获得最佳的发动机和螺旋桨,我使用了 电子计算器 这钱花得值。您还可以使用 驱动器计算器这是免费的。
通过Mission Planner地面站中的向导后,您应该有一个指向正确的指南针和一个正常工作的 GPS。我发现初始设置非常适合飞行,使用自动调整功能也能获得很好的效果。
在 6 米/秒的速度下,飞机会变得不稳定,并开始倾斜失速,因此巡航速度应高于此速度。使用 2216-800 kV 发动机、8-4.7 螺旋桨配置和 3000 mAh 电池,我的飞行速度达到了 80 分钟飞行 气流速度为 12 米/秒!