远距离 FPV 飞机¶


概述¶
在业余爱好者中,X-UAV MiniTalon 已成为最受欢迎的 FPV 飞机平台之一,因为它具有出色的飞行特性和高效率飞行。飞行时间可轻松超过 1 小时,如果使用容易获得的组件,飞行时间可超过 1 小时的 2 倍。
它具有相对较高的载重能力,可以在完全稳定的云台上携带高清摄像机进行长时间飞行。作为一款基本的 FPV 飞机,它还具有很强的操控性和运动性。
本指南介绍了一些一般的制作技巧,以及 FPV 飞机的基本 ArduPlane 配置。
许多照片和描述都借用了马克-Q-维尔的 网站其中展示了 MiniTalon 的许多其他配置、技巧和 3D 打印部件,包括许多万向节。一个 RCG 线程 也有大量关于变化的信息。
MiniTalon 还能很好地实现以下功能 垂直起降应用.

一般规格¶
翼展 |
1300 毫米 |
长度 |
830 毫米 |
重量 |
1450 - 1900gm |
电池 |
4s 5000mah- 10000mah |
持续时间 |
60-120 分钟 |
效率 |
80毫安/公里 |
部件清单¶
机身X-UAV MiniTalon 遥控飞机套件
电机Cobra 2221-16 940KV 或 SunnySky 2216 1450KV
电调40-60A,无需 BEC
螺旋桨APC-E 或 Aeronaut 折叠式 9X7 用于眼镜蛇,8X6 用于 Sunnysky 发动机
舵机:4 个 9 克至 12 克微型舵机。例如 EMAX ES08MA。
(飞行)控制器MatekF405-Wing
全球定位系统:任何 UBLOX MN-8 级 GPS,带或不带指南针(指南针为可选项)。以 BN-220 为例。
接收器:任何 6 通道 TX/RX 系统。长距离适用 433 或 900 Mhz 系统(Dragonlink、TBS 等),短距离适用 2.4GHz 系统(FRSky、Futaba、Spektrum 等)。
遥测(可选):3DR 或无线电系统,或通过接收器(如 Dragonlink(双向)或 FRSky(仅下行链路))进行遥测(如果接收器具备该功能)。
电池:4s 5200mah 10C Lipo 电池可提供 45-60 分钟的续航时间,并符合便于放置 CG(重心)的总体布局。
FPV 设备:需要微型摄像机和视频发射器(如果需要 FPV 功能,飞机可仅使用视线飞行,并根据需要仅使用 GCS(地面控制站)执行自主飞行任务)。有关建议,请参阅下面的 FPV 设备部分。
组装技巧¶
建造 MiniTalon 的说明非常简单,不过,下面的一些提示会有所帮助。
触发保护机制准备 & 胶水¶
粘合 EPO 泡沫时,可使用 Beacon Foam-Tac 或 E6000,效果非常好,而且凝固速度相当快。准备时,一定要用热水和少量洗洁精清洗所有部件的表面,以去除脱模剂。然后用变性酒精擦拭,最后用 100 号砂纸轻轻打磨胶水表面。
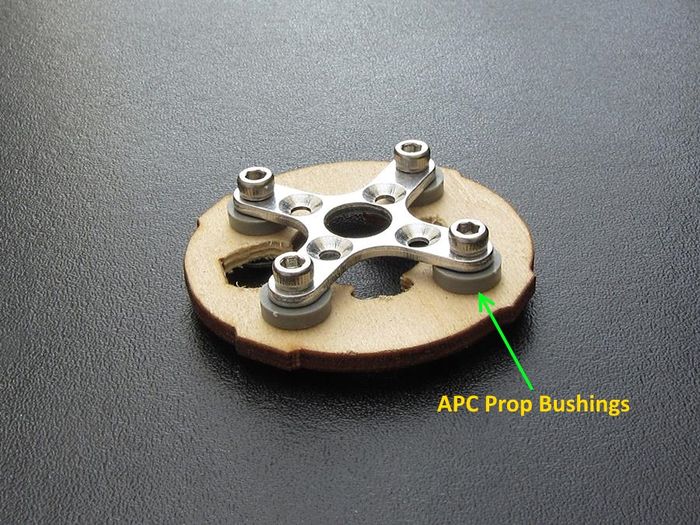
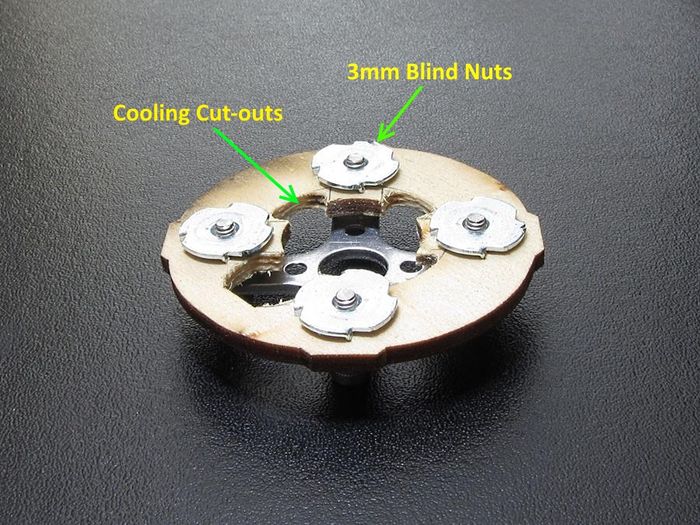
在粘合机身两半之前,用 APC 螺旋桨衬套和 3 毫米盲螺母安装马达固定板,使马达离开木头,以便更好地冷却。
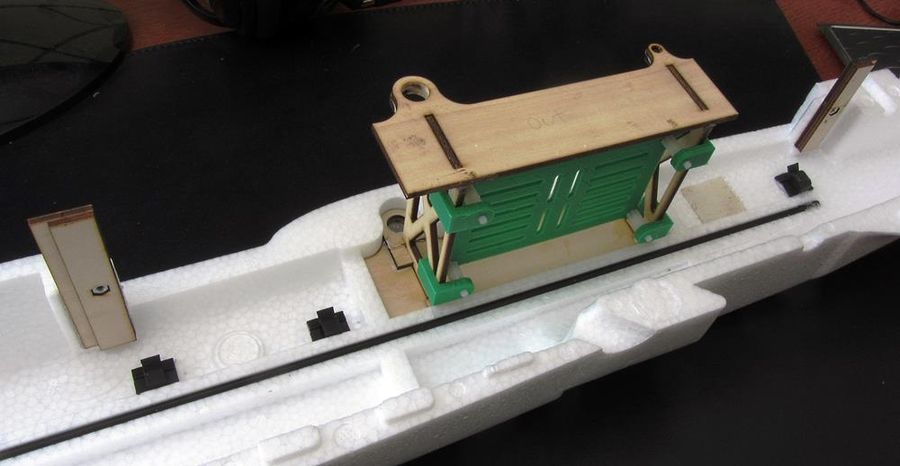
粘合电机支架后,粘合中心结构。可选择在两侧各添加一些缆线导轨和一些尼龙搭扣来固定接收器。套件中的中心结构没有安装(飞行)控制器的底板。您可以在底部添加一块胶合板,或者使用 Mark Qvale 提供的安装板进行 3D 打印。 网站.
可选前防滑块¶
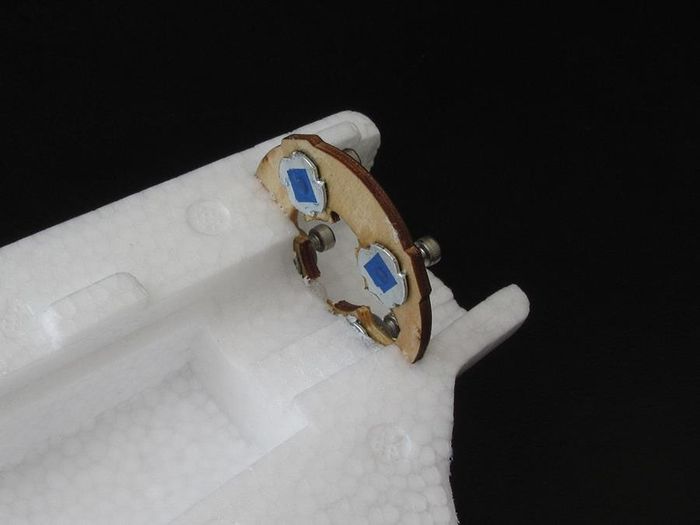
套件附带一个前轮。前轮很快就会损坏,因此建议不要使用。如下图所示,要么用加固的包装胶带粘住该区域,要么用 3D 打印或制作一个夹层滑板。

在尾部滑板上涂上加固胶带也能延长其使用寿命。
Vtail 伺服连接装置¶
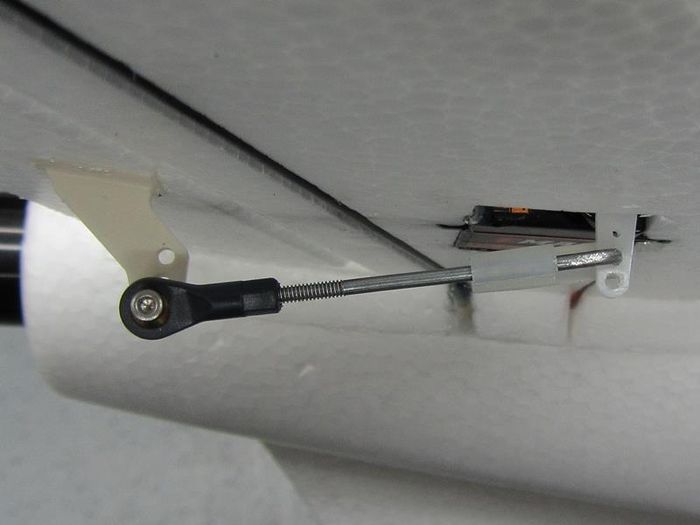
它提供直推杆到 Vtail 表面。但是,由于原车的几何形状导致连杆与控制面成一定角度,因此存在较大的偏差。不过,为了减少应变和任何可能的磨损,您可以使用下图所示的球形连杆。
动力传动系统¶
从(飞行)控制器的电调电源端子到电调的引线必须保持较短(4-5 英寸)。如果无法避免引线过长,则需要在电调输入端添加低 ESR 电容器,以防止可能的损坏。有些电调已经配备了这些电容器。
从电子调速器到电机的长导线是可以接受的。
如果将电调设置为滑行时大力制动,则可提高效率。折叠式螺旋桨也有帮助。
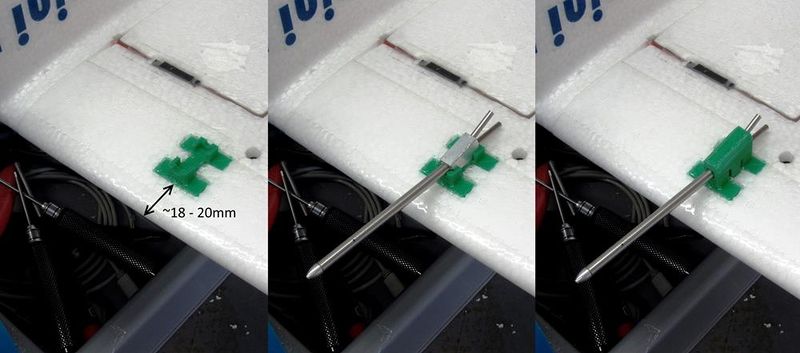
折叠式螺旋桨塞¶
如果使用 Aeronaut 或其他折叠式螺旋桨来提高效率,则需要螺旋桨挡板。3d 打印设计可在 Mark Qvale 的 网站.

组件位置¶
下面的图片说明了典型的组件位置。
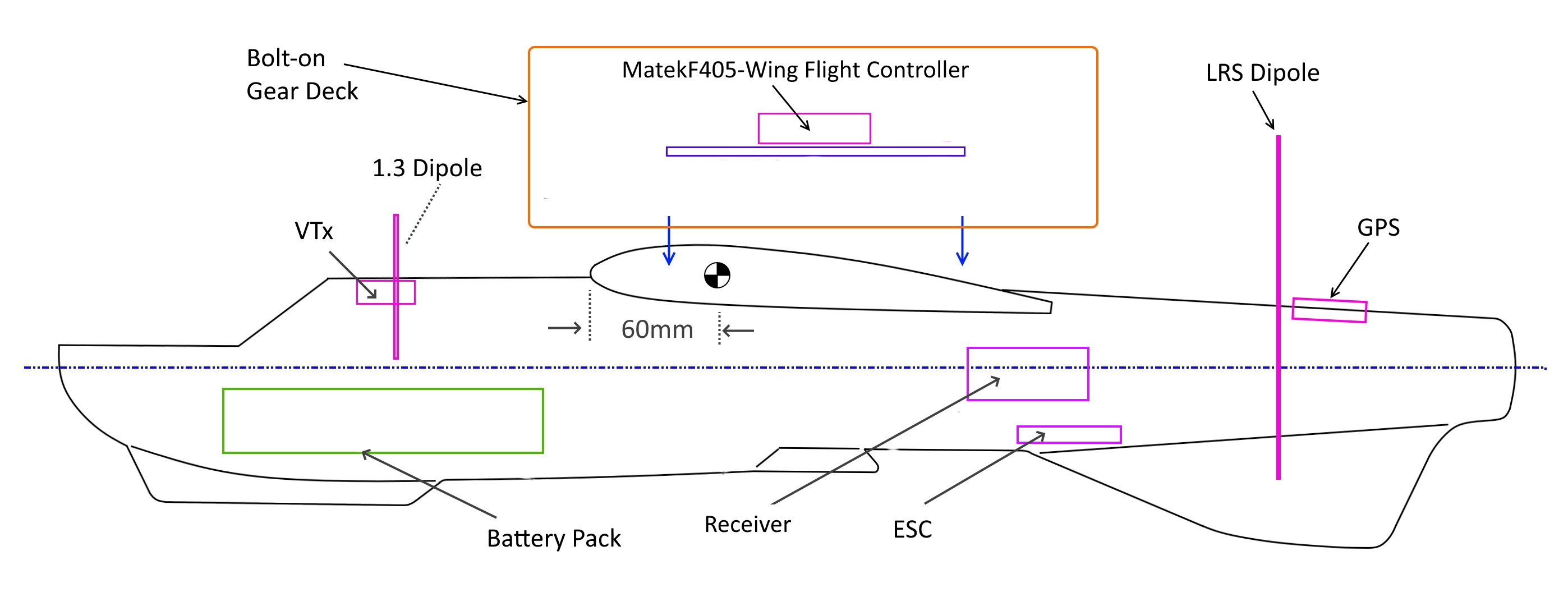
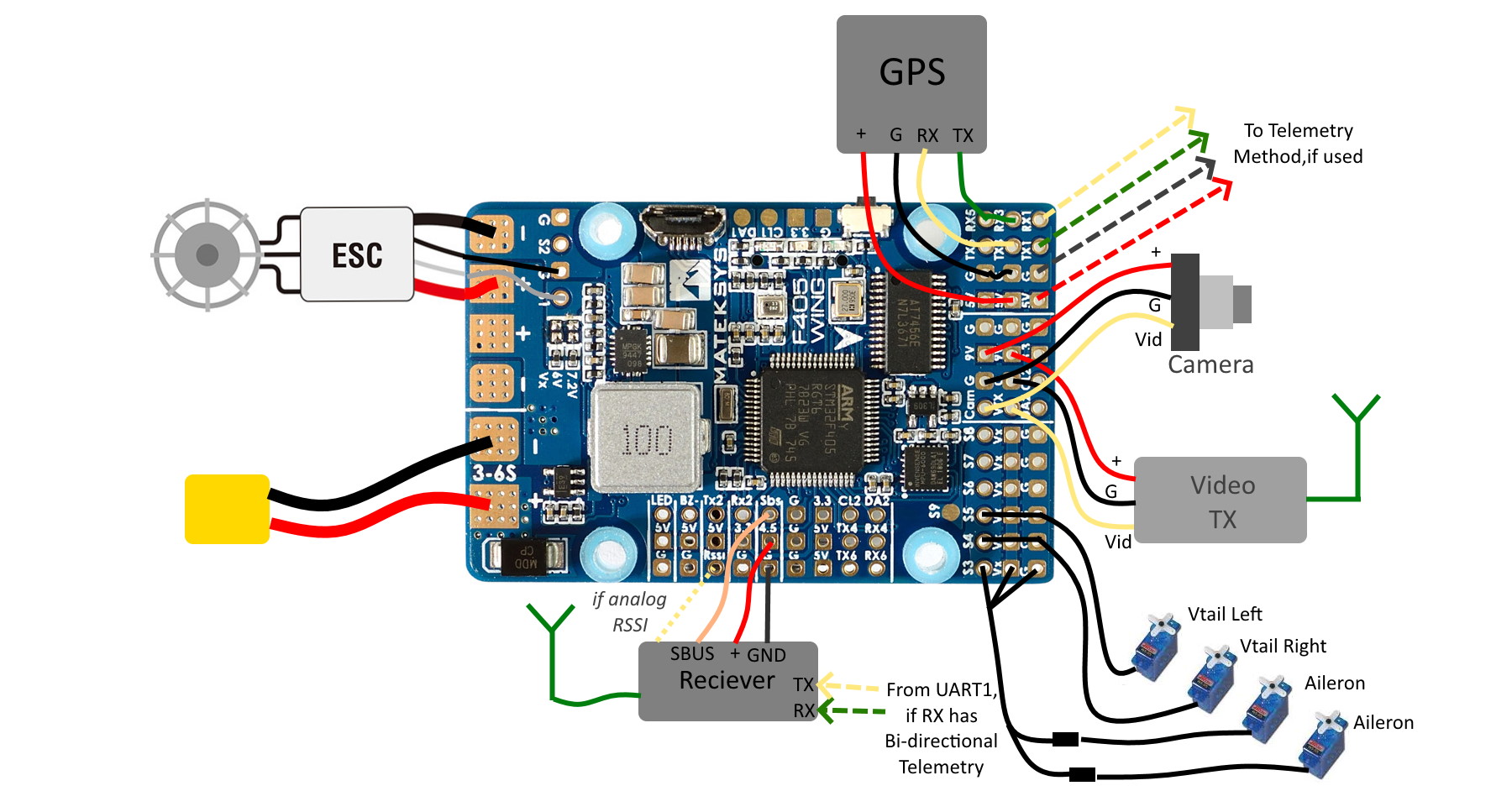
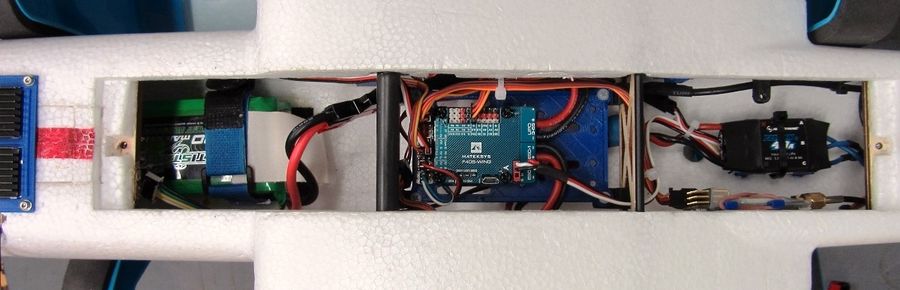
如图所示,GPS 和遥测连接与 Matek (飞行)控制器固件编程时加载的串行端口默认设置兼容。
必须对 SERVOx_FUNCTIONS 进行设置,以便分配如下内容:
servo1_function | 节流阀/电门 |
|
servo3_function | 通过 Y 型伺服电缆连接两个副翼 |
|
servo4_function | VTail 左 |
|
servo5_function | VTail Right |
提示
如果副翼伺服器连接到单独的 PWM 输出端,则 飞翼 功能。不过,由于 MiniTalon 没有使用全长副翼,襟翼效果将受到限制,甚至可能有害,导致对 "翼尖失速 "的敏感性增加。
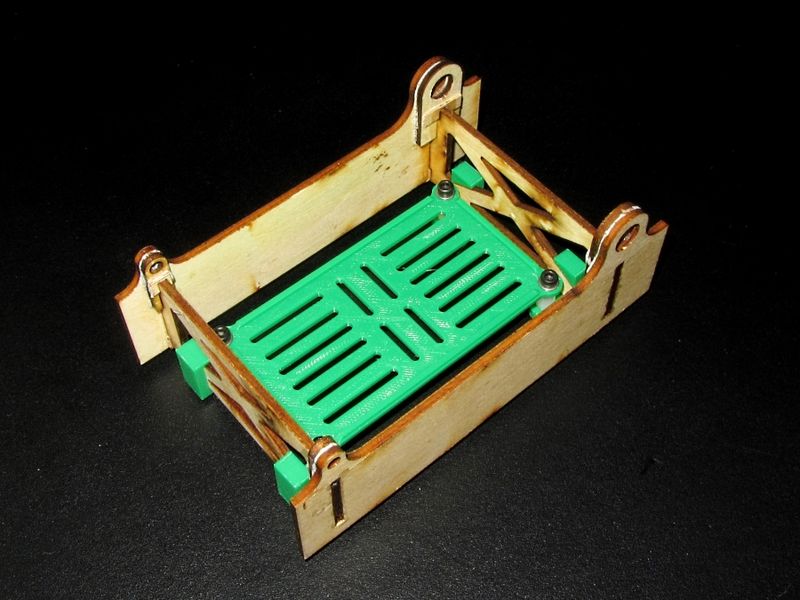
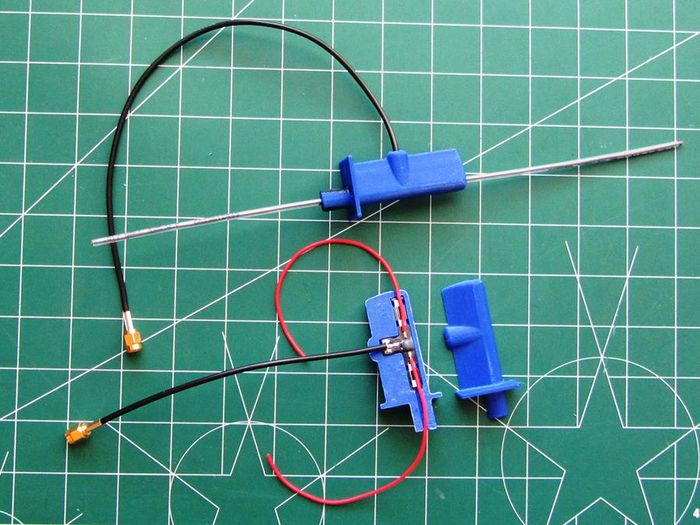
如果使用 LRS(远距离遥控系统),天线的安装对于实现最大距离至关重要。大多数 LRS 系统使用偶极子。下图是一个 3d 打印的支架,可以确保两个元件都是垂直的。任何能确保偶极子垂直安装的方法都能令人满意。

配置/参数设置¶
参见 FPV 飞机 了解软件设置信息。
FPV 设备¶
FPV 摄像机和发射器的选择很多,而且每天都在增加。请确保相机和视频发射器都能在 9V 电压下工作,因为 MatekF405-Wing (飞行)控制器为视频供电。也可通过(飞行)控制器背面的焊接跳线将视频电源从 9V 改为 12V。
对于远距离操作,视频发射器应在 1.2Ghz 或 1.3Ghz 频率下工作。对于 2Km 或以下的距离,通常使用 5.8GHz 传输。
由于 MatekF405-Wing 集成了 OSD(屏幕显示)功能,因此无需外接 OSD。
参见 FPV 信息页面.
选项¶
空速传感器¶
通过添加数字空速传感器,可在巡航飞行期间获得精确的空速控制,并可连接到 MatekF405-Wing (飞行)控制器的 CL1/DA1 或 CL2/DA2 引脚上。不过,这是可选项,ArduPlane 在不添加此功能的情况下也能飞行得非常好。请参阅 空速传感器 部分获取更多信息。

指南针¶
同样,还可以通过连接(飞行)控制器的 CL1/DA1 或 CL2/DA2 引脚来添加指南针。这也是可选项,在 "巡航 "和 "自动 "模式下可提供略微更好的导航跟踪效果。
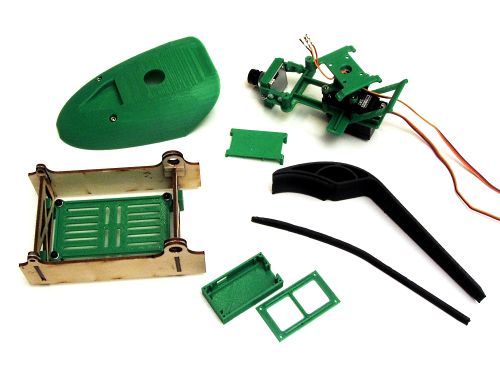
金布尔斯¶
将高清摄像机和/或飞行摄像机安装到可控云台支架上的选择很多。此外,这些云台支架甚至可以在一个或多个轴上进行稳定,以提供影院般的稳定性。Mark Qvale 的 网站 有很多例子和版本。
提示
将飞行相机安装在稳定支架上通常不是一个好主意,因为操作员在飞行时会失去对飞机姿态的反馈。



3D 打印配件¶
许多 3D 打印配件/部件可在 Mark Qvale 的 网站
视频¶
如果以上链接无效,请尝试 视频的直接链接.