Pix32 v5¶

系统功能¶
HolyBro Pix32 v5 是基于 FMUv5 方案开发的新型(飞行)控制器,可视为 "Pixhawk4 "的变体版本。
Pix32 v5 由独立的(飞行)控制器和载板组成,两者通过 100pin 连接器连接。它专为那些需要高功率、灵活且可定制的飞行控制系统的飞行员而设计。
Holybro 提供两种不同的载板,包括超紧凑的 "迷你 "版。
制造商可以根据自己的具体需求设计载板。
规格¶
- 处理器
32 位 Arm Cortex-M7 ®; 216MHz、2MB 内存、512KB RAM
32 位 Arm Cortex-M3 ®; IO 协处理器,24MHz,8KB SRAM
- 传感器
Accel/Gyro: ICM-20689
Accel/Gyro: BMI055
Mag:IST8310
气压计MS5611
- 接口
8-16 路 PWM 伺服输出(8 路来自 IO 协处理器,8 路来自主 CPU)
3 个专用 PWM/捕获输入
用于 CPPM 的专用 R/C 输入
用于 Spektrum/DSM 和 S.Bus 的专用 R/C 输入
模拟/PWM RSSI 输入
专用 S.Bus 伺服输出
- 5 个通用串行端口
两个 USART,具有完全流量控制功能
载板上的 UART1 端口 5V 电源,电流限制为 1.5A
3 个 I2C 端口
- 4 条 SPI 总线
1 个内部高速 SPI 传感器总线,带 4 个芯片选择和 6 个 DRDY
1 条气压计专用内部低噪音 SPI 总线,带 2 个芯片选择,无 DRDY
1 条专用于 FRAM 的内部 SPI 总线
支持传感器模块上的专用 SPI 校准 EEPROM
1 条外部总线
带串行 EEPROM 的双 CAN CAN 总线最多可达 2 个
每条 CANBus 总线都有独立的静音控制器,用于电调 RX-MUX 控制
两个电池监控器的电压/电流模拟输入端,另有两个模拟输入端
- 额定电压
(飞行)控制器电源模块输入电压:4.9~5.5V
最大输入电压:6 伏
USB 电压输入:4.75~5.25V(为所有载板 5V 输出提供电压,受 USB 电流源能力限制)
伺服轨输入:0~36V;伺服导轨与其他内部组件隔离,需要自己供电)。
- 机械数据
尺寸:45 毫米 x 45 毫米 x 13.5 毫米45 毫米 x 45 毫米 x 13.5 毫米
重量:33.0 克
UART 映射¶
SERIAL0 -> USB
SERIAL1 -> UART2 (Telem1)
SERIAL2 -> UART3 (Telem2)
SERIAL3 -> UART1 (GPS)
SERIAL4 -> UART4(GPS2,标记为 TEL4/GPS2)
SERIAL5 -> UART6 (Telem3)
SERIAL6 -> UART7(备用,调试)
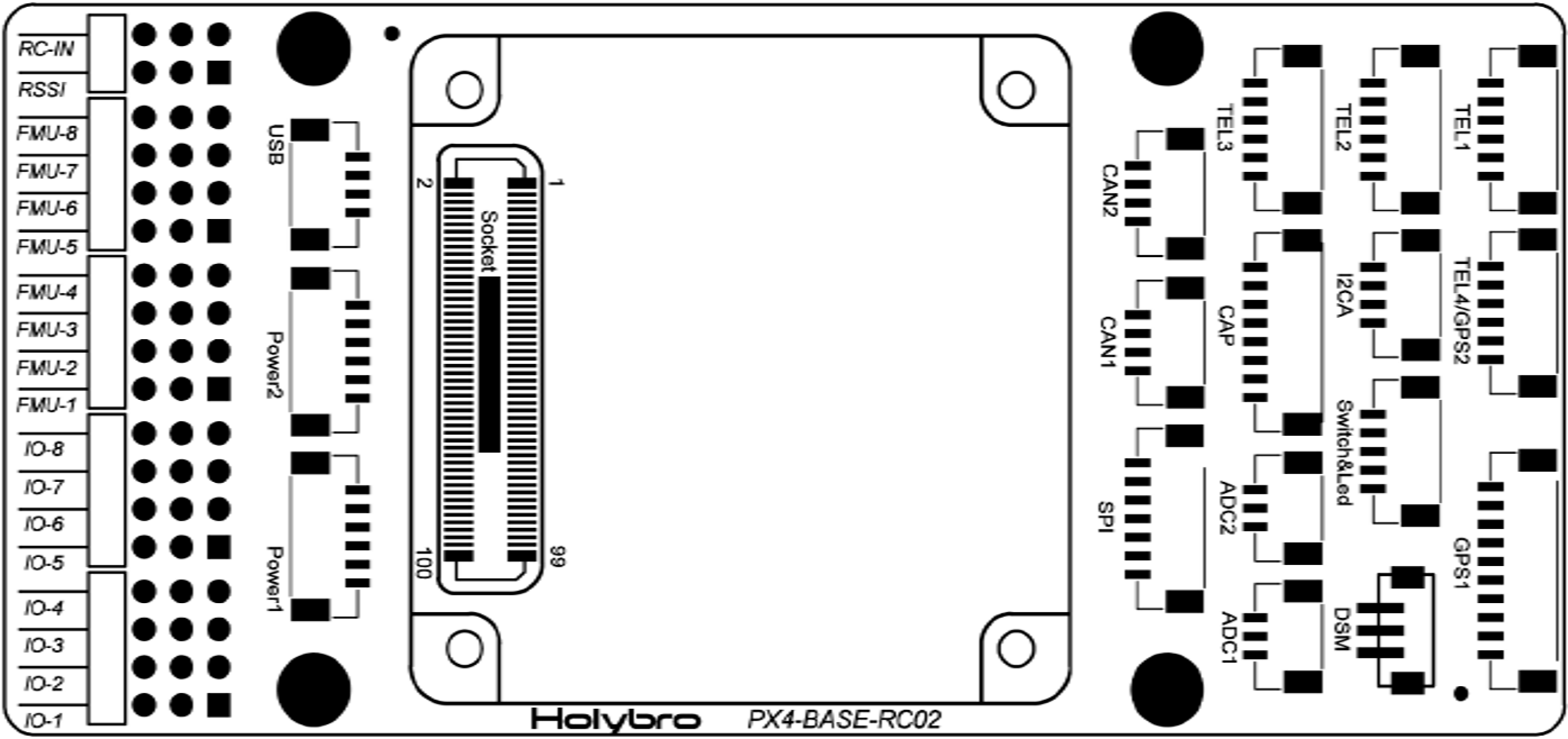
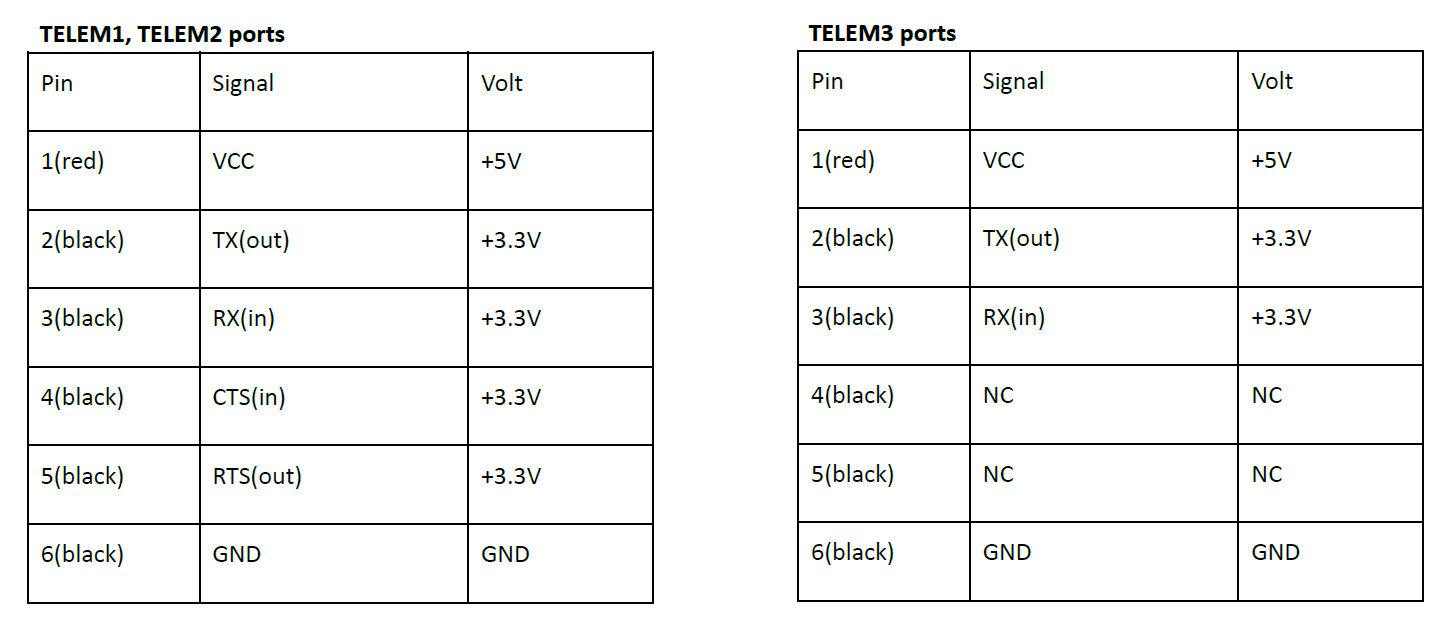
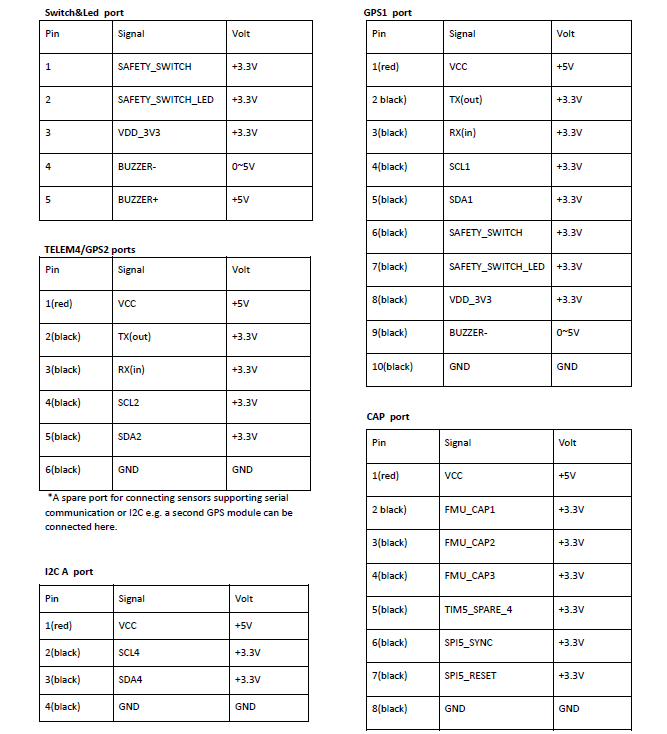
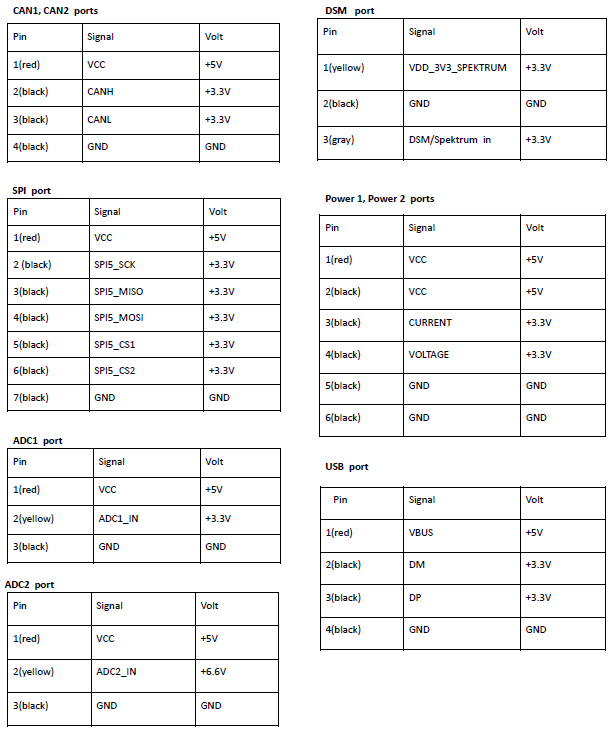
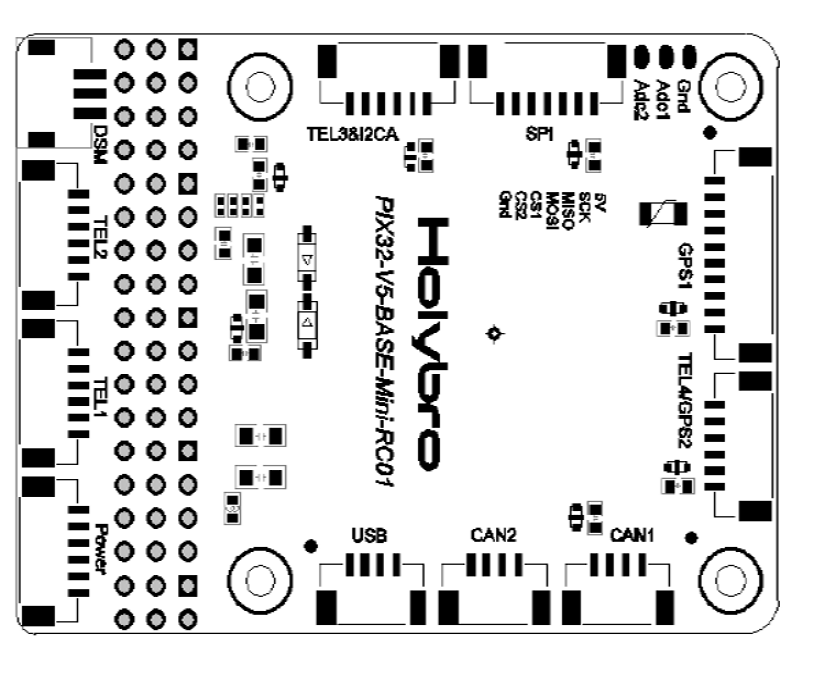
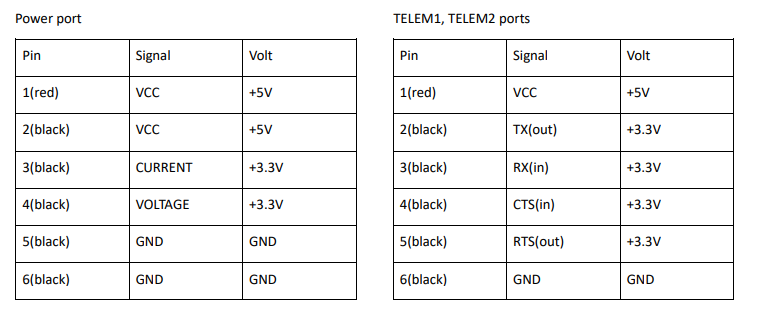
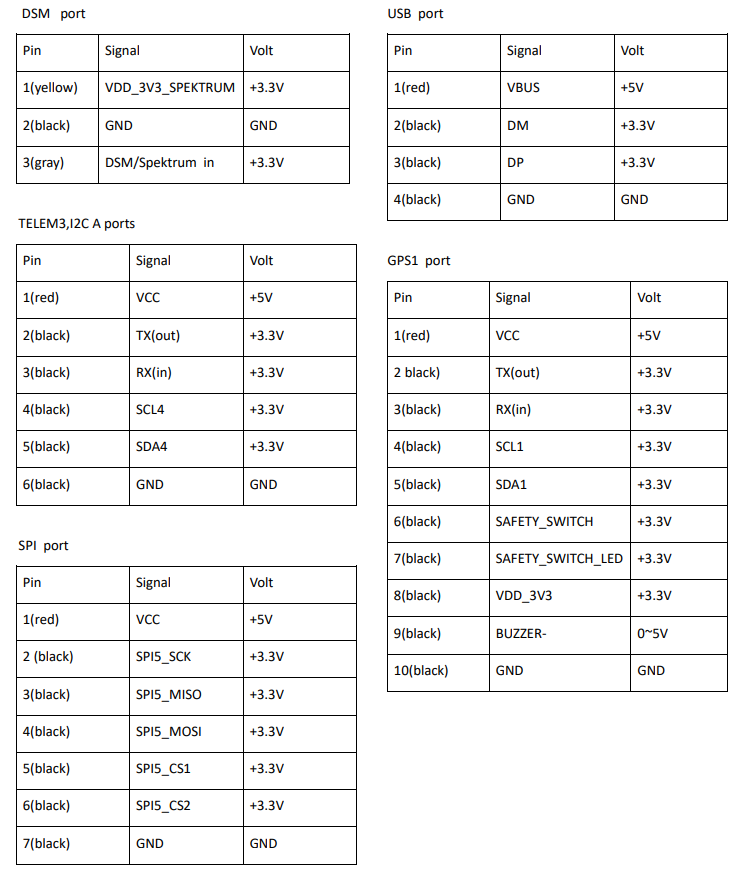
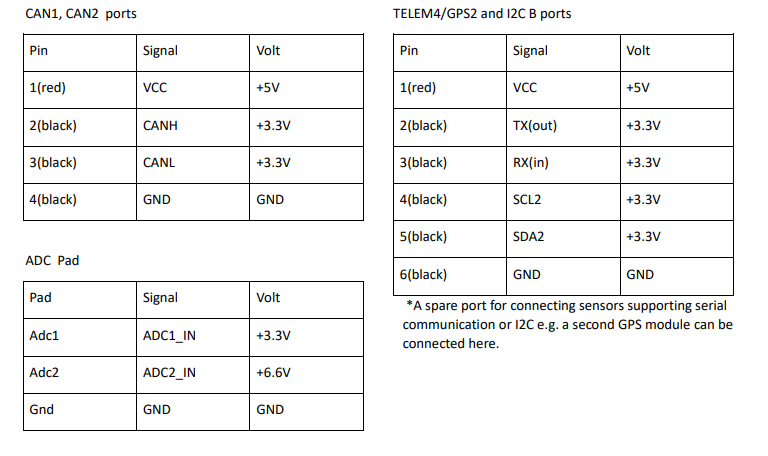
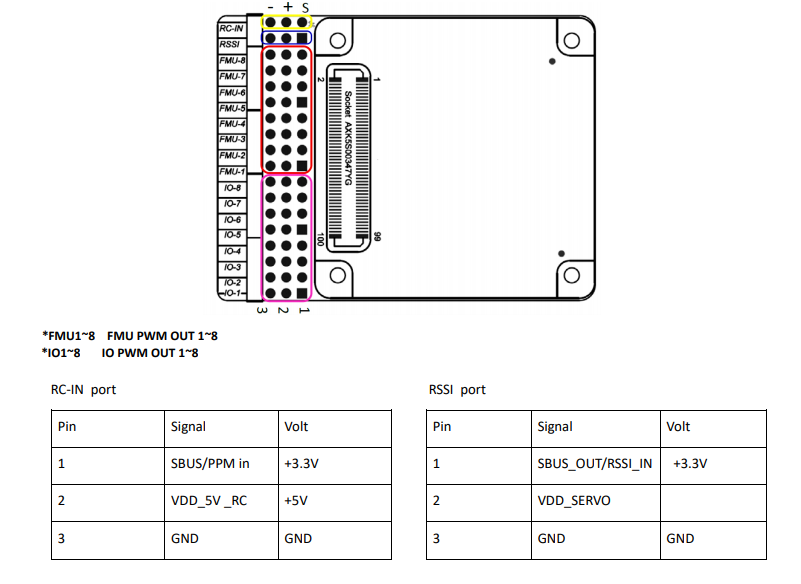
载波板针脚分配¶
本节详细介绍了标准和微型载板的引脚分配。原始设备制造商可根据具体要求设计自己的载板。设计原理图、模块连接器和引脚分配、3D 打印机文件等可在以下网站找到 这里.
备注
VDD_5V_RC 在连接 USB 或电源模块供电时提供。电源模块将提供除 VDD_SERVO 以外的所有 5V 输出,VDD_SERVO 应由独立电源(如电调或独立 BEC)提供。
标准¶
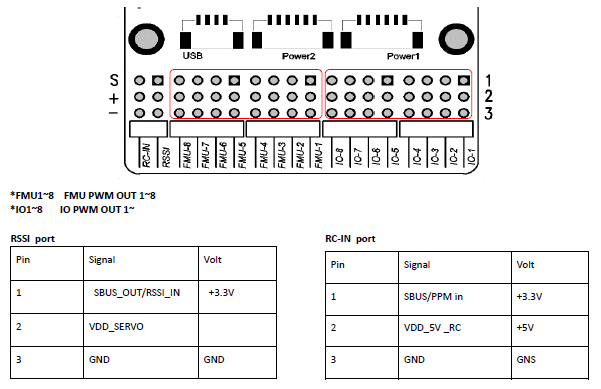
迷你型¶
购买地点¶
圣卡罗 .