Pixhawk 概览¶
备注
旧版本的 Pixhawk 使用早期版本的 STM32F427 芯片(RevA、RevY 和 Rev1)。这些芯片存在一个硬件错误,将闪存限制为 1 MB。由于这一限制,任何包含该芯片的电路板都无法包含所有 ArduPilot 功能。请参见 固件限制 了解详情。
规格¶
处理器
32 位 ARM Cortex M4 内核,带 FPU
168 Mhz/256 KB RAM/2 MB 闪存
32 位故障安全协处理器
传感器
MPU6000 作为主加速器和陀螺仪
ST 微型 16 位陀螺仪
ST Micro 14 位加速计/罗盘(磁力计)
MEAS 气压计
电源
具有自动故障切换功能的理想二极管控制器
伺服轨道高功率(7 V)和大电流就绪
所有外设输出均受过流保护,所有输入均受 ESD 保护
接口
5x UART 串行端口,1 个高功率端口,2 个带硬件流量控制功能
Spektrum DSM/DSM2/DSM-X 卫星输入
Futaba S.BUS 输入(尚未实现输出)
PPM 和信号
RSSI(PWM 或电压)输入
I2C、SPI、2x CAN、USB
3.3V 和 6.6V ADC 输入
尺寸
重量 38 克(1.3 盎司)
宽度 50 毫米(2.0 英寸)
高度 15.5 毫米(0.6 英寸)
长度 81.5 毫米(3.2 英寸)
购买¶
Pixhawk 1 最初由 3DR 生产和销售。
现在可以从 mRo 公司获得略有改进但完全兼容的变体: mRo Pixhawk 2.4.6 基本套件!
Pixhawk 连接器分配¶
警告
许多 Pixhawk 克隆版使用 Molex picoblade 连接器,而不是 DF13 连接器。它们的插针是矩形的,而不是方形的,因此不能认为它们是兼容的。
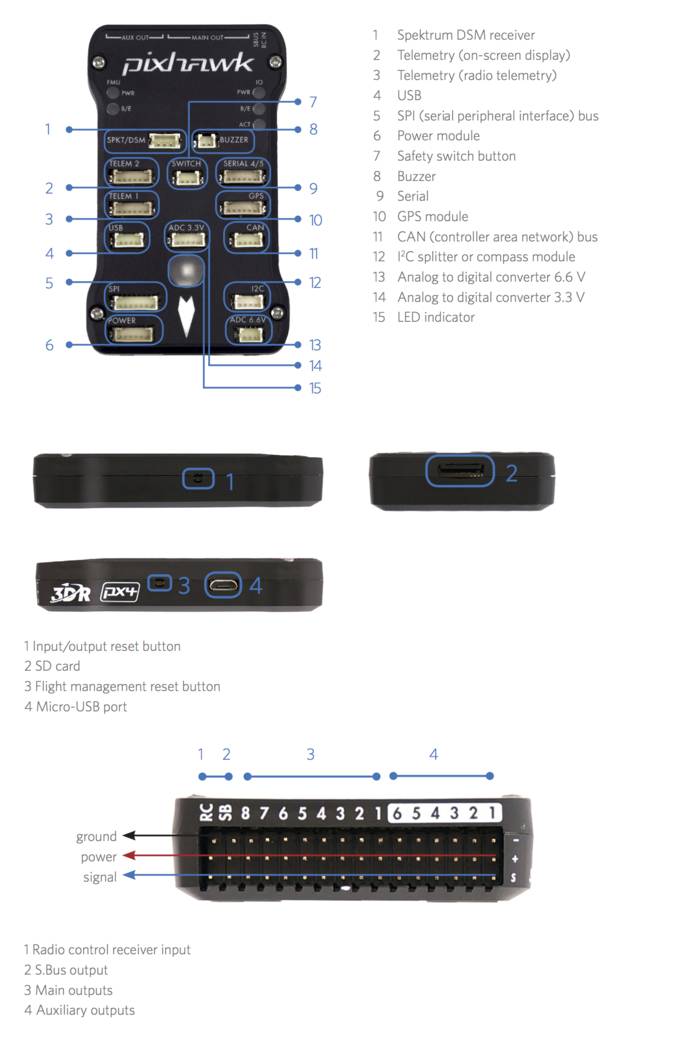
Pixhawk 顶部连接器¶

用于伺服和 ESC 的 Pixhawk PWM 连接器以及 PPM-SUM 输入和 SBUS 输出¶

Pixhawk 连接器图¶
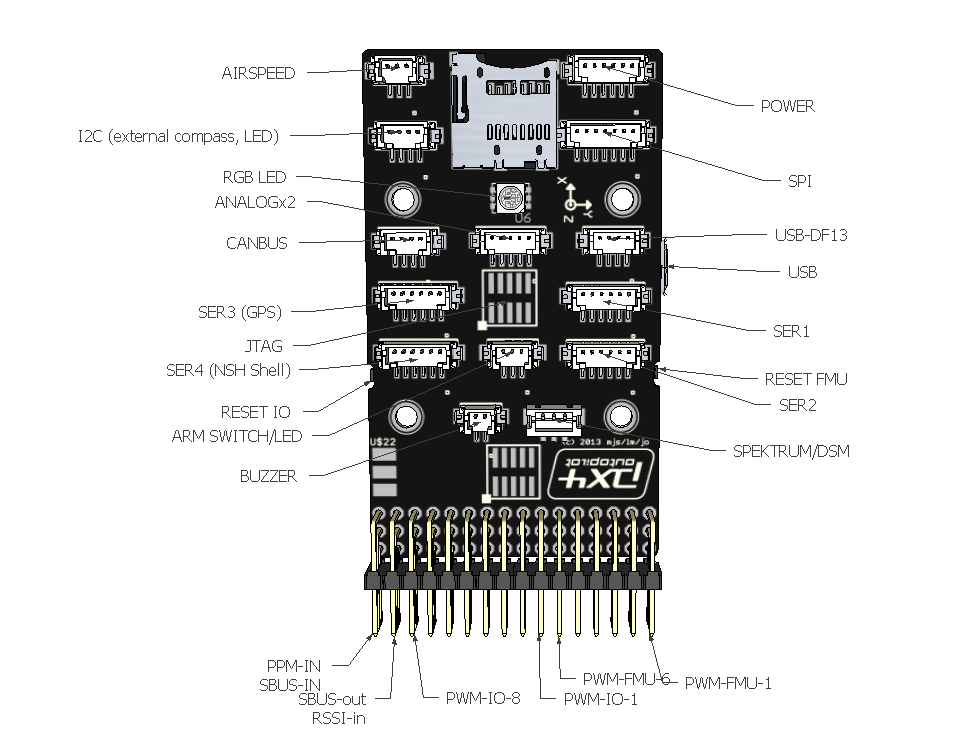
上图中所有连接器的 1 号针脚都在右侧
串行 1 (Telem 1) 和串行 2 (Telem 2) 引脚:6 = GND,5 = RTS,4 = CTS,3 = RX,2 = TX,1 = 5V。
Pixhawk 连接器针脚分配¶
TELEM1, TELEM2 端口¶
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +5V |
| 2(黑色) | TX (OUT) | +3.3V |
| 3(黑色) | RX (IN) | +3.3V |
| 4(黑色) | CTS | +3.3V |
| 5(黑色) | RTS | +3.3V |
| 6(黑色) | 接地 | 接地 |
GPS 端口¶
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +5V |
| 2(黑色) | TX (OUT) | +3.3V |
| 3(黑色) | RX (IN) | +3.3V |
| 4(黑色) | CAN2 TX | +3.3V |
| 5(黑色) | CAN2 RX | +3.3V |
| 6(黑色) | 接地 | 接地 |
串行 4/5 端口 - 由于空间限制,两个端口位于一个连接器上。¶
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +5V |
| 2(黑色) | 德克萨斯州 (#4) | +3.3V |
| 3(黑色) | RX (#4) | +3.3V |
| 4(黑色) | 德克萨斯州 (#5) | +3.3V |
| 5(黑色) | RX (#5) | +3.3V |
| 6(黑色) | 接地 | 接地 |
ADC 6.6V¶
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +5V |
| 2(黑色) | ADC 输入 | 高达 +6.6V |
| 3(黑色) | 接地 | 接地 |
ADC 3.3V¶
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +5V |
| 2(黑色) | ADC 输入 | 高达 +3.3V |
| 3(黑色) | 接地 | 接地 |
| 4(黑色) | ADC 输入 | 高达 +3.3V |
| 5(黑色) | 接地 | 接地 |
I2C¶
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +5V |
| 2(黑色) | SCL | +3.3(上拉) |
| 3(黑色) | SDA | +3.3(上拉) |
| 4(黑色) | 接地 | 接地 |
CAN¶
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +5V |
| 2(黑色) | CAN_H | +12V |
| 3(黑色) | CAN_L | +12V |
| 4(黑色) | 接地 | 接地 |
SPI¶
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +5V |
| 2(黑色) | SPI_SCK | 3.3V |
| 3(黑色) | SPI_MISO | +3.3V |
| 4(黑色) | SPI_MOSI | +3.3V |
| 5(黑色) | SPI_NSS | +3.3V |
| 6(黑色) | GPIO | +3.3V |
| 7(黑色) | 接地 | 接地 |
权力¶
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +5V |
| 2(黑色) | VCC | +5V |
| 3(黑色) | 当前 | 高达 +3.3V |
| 4(黑色) | 电压 | 高达 +3.3V | 5(黑色) | 接地 | 接地 | 6(黑色) | 接地 | 接地 |
开关¶
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +3.3V |
| 2(黑色) | !IO_LED_SAFETY | 接地 |
| 3(黑色) | 安全 | 接地 |
控制台端口¶
系统的串行控制台运行在标有 SERIAL4/5 的端口上。引脚输出是标准串行引脚输出,用于连接标准 FTDI 电缆(3.3V,但可容忍 5V)。
| Pixhawk | FTDI | ||
|---|---|---|---|
| 1 | +5V(红色) | N/C | |
| 2 | 特克斯 | N/C | |
| 3 | Rx | N/C | |
| 4 | 特克斯 | 5 | Rx (黄色) |
| 5 | Rx | 4 | Tx (橙色) |
| 6 | 接地 | 1 | 接地(黑色) |
Spektrum/DSM 端口¶
Spektrum/DSM 端口用于连接 Spektrum DSM-2/DSMX 接收机模块。
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1(白色) | 信号 | +3.3V |
| 2(黑色) | 接地 | 接地 |
| 3 (红色) | VCC | +3.3V |
连接和断开 DF13 连接器¶
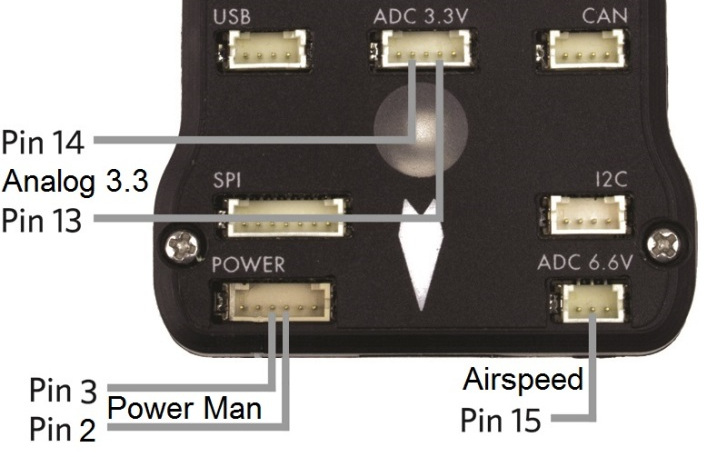
Pixhawk 模拟输入引脚¶
本节列出了 Pixhawk 上可用的模拟引脚。这些都是虚拟引脚,在固件中定义。
虚拟引脚 2 和电源连接器引脚 4电压引脚:电源管理连接器电压引脚,最高可接受 3.3V,通常连接到具有 10.1:1 缩放比例的电源模块上
虚拟引脚 3 和电源连接器引脚 3:电源管理连接器电流引脚,最高可接受 3.3V,通常连接到具有 17:1 缩放比例的电源模块上
虚拟引脚 4 和(无连接器引脚):VCC 5V 电源轨检测。该虚拟引脚读取 5V 电源轨上的电压。它用于提供 HWSTATUS.Vcc 读数,地面站利用该读数显示 5V 状态。
虚拟引脚 13 和 ADC 3.3V 连接器引脚 4:最大电压为 3.3V。可用于声纳或其他模拟传感器。
虚拟引脚 14 和 ADC 3.3V 连接器引脚 2:最大电压为 3.3V。可用于第二个声纳或其他模拟传感器。
虚拟引脚 15 和 ADC 6.6V 连接器引脚 2模拟空速传感器端口。该端口内置 2:1 缩放功能,可接收高达 6.6v 的模拟输入。通常用于模拟空速,也可用于模拟声纳或其他模拟传感器。
虚拟引脚 102:伺服电源轨电压。这是由 Pixhawk 中的 IO 板对伺服轨电压进行的内部测量。它具有 3:1 的缩放比例,可测量高达 9.9V 的电压。
虚拟引脚 103:RSSI(接收信号强度输入)输入引脚电压(SBUS 连接器输出引脚)。这是 SBUS 输出连接器上 RSSI 输入引脚(14 个连接器伺服轨道上倒数第二个伺服连接器的底部引脚)测量到的电压。
通过设置
BRD_SBUS_OUT 参数 旋翼飞行器,
固定翼飞行器, 无人车UGV).
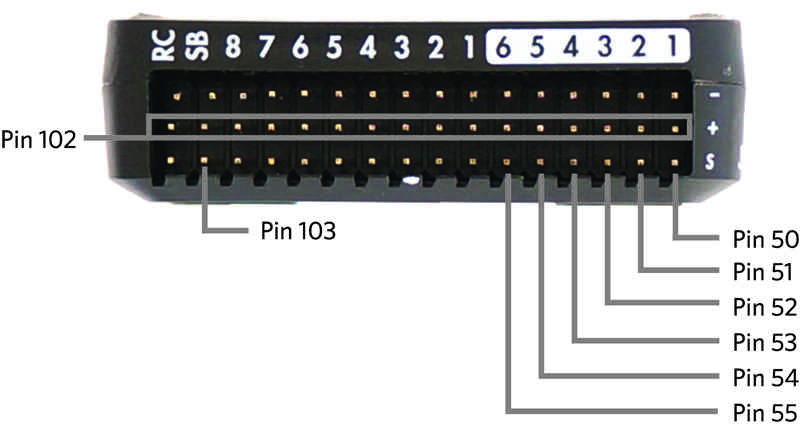
Pixhawk 数字输出和输入(虚拟引脚 50-55)¶
Pixhawk 的 DF13 连接器上没有专用的数字输出或输入引脚,但您最多可以将 6 个 "AUX SERVO "连接器分配为数字 GPIO 输出/输入。这些是电路板末端 14 个三针伺服连接器中的前 6 个。如上图所示,它们在丝印上标记为 AUX 伺服引脚 1 - 6。
要设置可用作数字输入/输出的引脚数量,请设置 BRD_PWM_COUNT 参数。在 Pixhawk 上,默认值为 4,这意味着前 4 个 AUX 连接器用于舵机(PWM),后 2 个用于数字输入/输出。如果将
BRD_PWM_COUNT 这样就有 6 个虚拟数字引脚,而连接器的其余部分仍有 8 个 PWM 输出。
备注
在固件 4.2 及更高版本中,将 PWM/SERVO/MOTOR 输出设置为 GPIO 功能的方法有所改变。而不是 BRD_PWM_COUNT 个人 SERVOx_FUNCTION 参数仅设置为"-1"。如果设置为 "0",则仍为 PWM 输出,未指定功能,并在电路板安全未激活时输出该输出的微调值。如果舵机功能被 "镜像 "到远程设备(如 DroneCAN 或 KDECAN ESC),那么要将自动驾驶板的相应输出引脚改为 GPIO,但允许 SERVOx_FUNCTION 仍分配给远程设备,则 servo_gpio_mask 参数可用于将电路板引脚指定为 GPIO,而不影响 SERVOx_FUNCTION 远程设备的分配。
6 个可能的引脚可用于 PIN 变量,引脚编号为 50 至 55(含 55)。
总而言之
如果 BRD_PWM_CNT = 2,那么
50 = RC9
51 = RC10
52 = 辅助 3
53 = 辅助 4
54 = 辅助 5
55 = 辅助设备 6
如果 BRD_PWM_CNT = 4,那么
50 = RC9
51 = RC10
52 = RC11
53 = RC12
54 = 辅助 5
55 = 辅助设备 6
如果 BRD_PWM_CNT = 6,那么
50 = RC9
51 = RC10
52 = RC11
53 = RC12
54 = RC13
55 = RC14
默认情况下,引脚为数字输出,如上所述。如果将数字引脚分配给代表数字输入的参数,则该引脚将成为数字输入。例如,设置 cam1_feedbak_pin 到 50 将使针脚 50 成为数字输入端,在拍照时接收来自相机的信号。
供电¶
主题 为 Pixhawk 供电 介绍了 Pixhawk 的简单和高级电源选项。