Pixracer¶
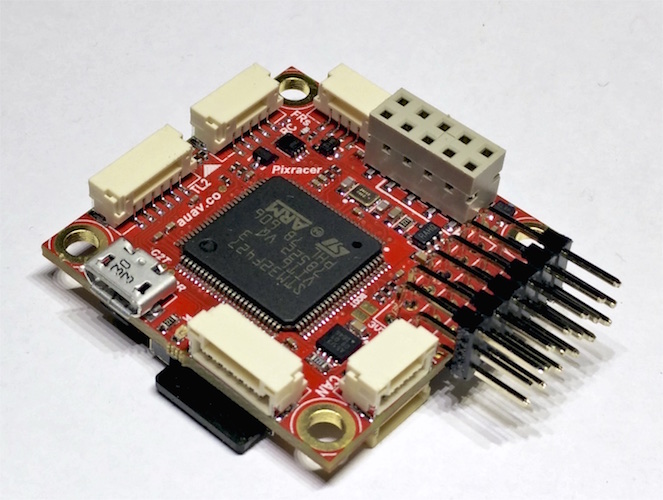
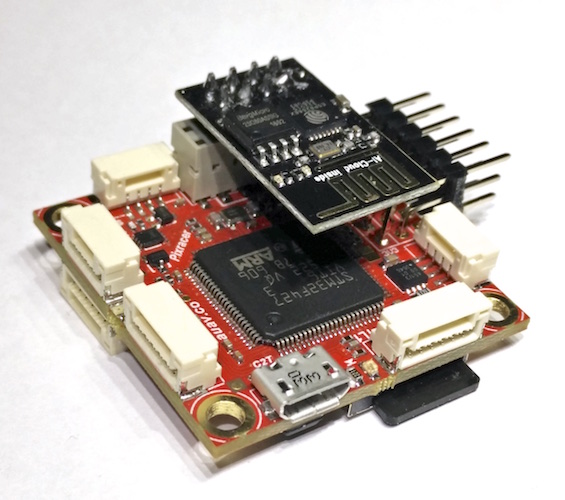
"这款" Pixracer 是 FMUv4 Pixhawk 第一代(飞行)控制器。它配有一个小型 Wifi 扩展板。

概述¶
"这款" Pixracer 是 FMUv4 代 Pixhawk (飞行)控制器的通用名称。它主要针对小型多旋翼飞行器的苛刻要求而设计,当然也可用于飞机和其他不需要超过 6 pwm 输出来控制 escs 和电机的飞行器。Pixracer 可从 移动机器人
提示
在撰写本文时,(飞行)控制器仍在不断发展/改进中。最终版本可能与此处提供的信息略有不同。
下面的视频详细介绍了电路板。更多信息请访问 pixhawk.org 和 移动机器人.
规格¶
处理器:
MCU - STM32F427VIT6 rev.3
用于传感器和 FMU 的超低噪声 LDO
框架 - FM25V02-G
传感器
陀螺仪/加速计:Invensense MPU9250 加速计/陀螺仪/磁力计(4 千赫兹)
陀螺仪/加速计:Invensense ICM-20608 加速/陀螺仪(4 千赫)
气压计MS5611
罗盘霍尼韦尔 HMC5983 磁力计,带温度补偿功能
电源
来自 USB 或 PowerBrick 连接器的 5-5.5VDC 电压。可选/推荐 ACSP4 +5V/+12V电源.
接口/连接性
Wifi:ESP-01 802.11bgn 已刷入 MavESP8266
MicroSD 读卡器
微型 USB
RGB LED
GPS(串行 + I2C)
TELEM1/TELEM2
无线串行
FrSky 遥测串行接口(见注释)
调试连接器(串行 + SWD)
连接器:GPS+I2C、RC-IN、PPM-IN、RSSI、SBus-IN、Spektrum-IN、USART3(TxD、RxD、CTS、RTS)、USART2(TxD、RxD、CTS、RTS)、FRSky-IN、FRSky-OUT、CAN、USART8(TxD、RxD)、ESP8266(全套)、SERVO1-SERVO6、USART7(TxD、RxD)、JTAG(SWDIO、SWCLK)、POWER-BRICK(VDD、电压、电流、接地)、BUZZER-LED_BUTTON。
尺寸
重量?
36 x 36 毫米,带 30.5 x 30.5 毫米孔格,带 3.2 毫米孔
备注
FrSky 遥测端口使用 74LVC2G86 NOR 门作为 RX 和 TX 线路的可编程反相器。有关使用信息,请参阅下文。
连接器针脚分配¶
除非另有说明,所有连接器均为 JST GH
TELEM1, TELEM2+OSD 端口¶
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +5V |
| 2(黑色) | TX (OUT) | +3.3V |
| 3(黑色) | RX (IN) | +3.3V |
| 4(黑色) | CTS (IN) | +3.3V |
| 5(黑色) | RTS (OUT) | +3.3V |
| 6(黑色) | 接地 | 接地 |
GPS 端口¶
| 密码 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +5V |
| 2(黑色) | TX (OUT) | +3.3V |
| 3(黑色) | RX (IN) | +3.3V |
| 4(黑色) | I2C1 SCL | +3.3V |
| 5(黑色) | I2C1 SDA | +3.3V |
| 6(黑色) | 接地 | 接地 |
FrSky 遥测/SERIAL4¶
| 密码 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +5V |
| 2(黑色) | TX (OUT) | +3.3V |
| 3(黑色) | RX (IN) | +3.3V |
| 4(黑色) | 接地 | 接地 |
该端口在 TX 和 RX 线路上内置了反相器和分流电阻,可将它们绑在一起并连接到 FrSky 接收机的 SPort 输入端,以进行遥测。默认情况下,它是开启的,并且只有 serial4_protocol 必须设置为 "10",FrSky 的直通遥测数据才能发送到接收机。参见 FrSky 遥测技术 了解更多信息。
通过设置"......",可以禁用 TX/RX 路径反相器的操作。 serial4_options 将参数设置为 "2 "以 "反相 "TX,这将关闭 TX 和 RX 引脚的反相功能。如果需要,这将允许正常的 UART 操作。
遥控输入(接受 PPM / S.BUS / Spektrum / SUMD / ST24)¶
| 密码 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +5V |
| 2(黑色) | RC IN | +3.3V |
| 3(黑色) | RSSI 输入 | +3.3V |
| 4(黑色) | VDD 3V3 | +3.3V |
| 5(黑色) | 接地 | 接地 |
CAN¶
| 密码 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +5V |
| 2(黑色) | CAN_H | +12V |
| 3(黑色) | CAN_L | +12V |
| 4(黑色) | 接地 | 接地 |
电源¶
| 密码 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +5V |
| 2(黑色) | VCC | +5V |
| 3(黑色) | 当前 | +3.3V |
| 4(黑色) | 电压 | +3.3V |
| 5(黑色) | 接地 | 接地 |
| 6(黑色) | 接地 | 接地 |
开关¶
| 密码 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | 安全 | 接地 |
| 2(黑色) | !IO_LED_SAFETY | 接地 |
| 3(黑色) | 当前 | +3.3V |
| 4(黑色) | BUZZER- | - |
| 5(黑色) | BUZZER+ | - |
调试端口(JST SM06B 连接器)¶
| 密码 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | Vcc 目标移位 | +3.3V |
| 2(黑色) | 控制台发送(输出) | +3.3V |
| 3(黑色) | 控制台 RX(输入) | +3.3V |
| 4(黑色) | SWDIO | +3.3V |
| 5(黑色) | SWCLK | +3.3V |
| 6(黑色) | 接地 | 接地 |
购买地点¶
另见¶
备注
本页中的部分信息和图片抄袭自 pixhawk.org, docs.px4.io 和 mRobotics 商店