利用航点和事件规划任务¶
本页介绍所有类型载具的通用航点设置。
设置原点¶
对于 旋翼飞行器, 固定翼飞行器 和 无人车UGV 原点设置为载具上膛的位置。这意味着如果您执行 RTL,它将返回到上膛时的位置,因此请在您希望它返回的位置上膛载具,或使用集结点来设置其他返回点。
视频制作并保存多路点任务¶
视频加载已保存的多航点任务¶
说明¶
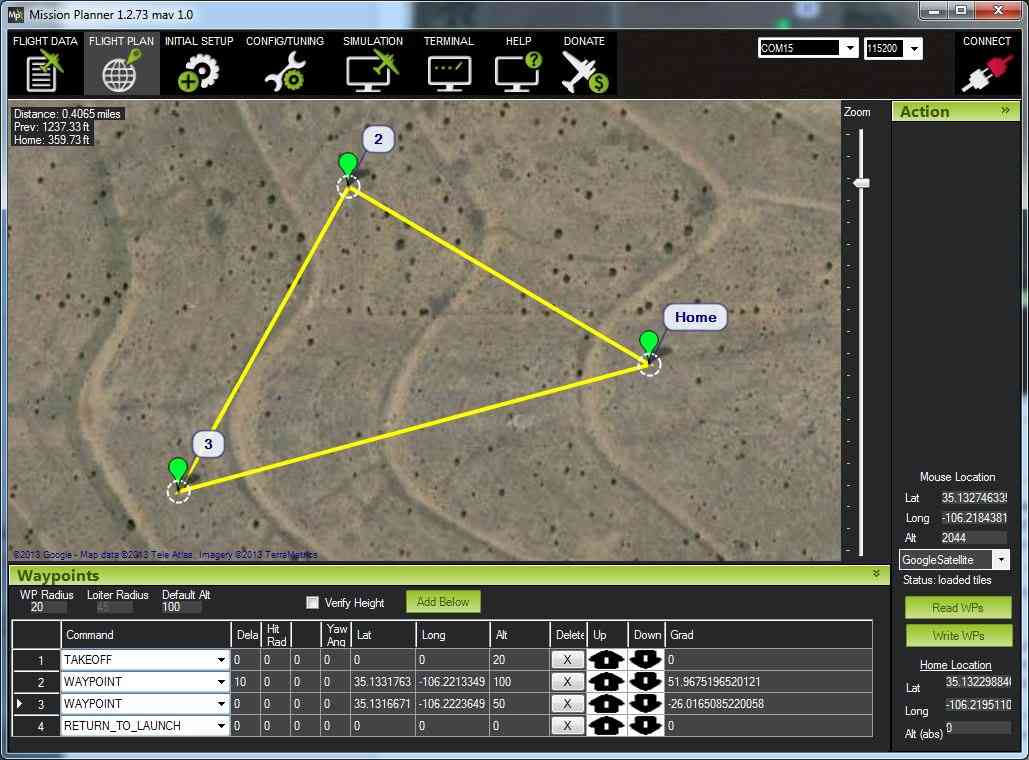
在下面的截图中,旋翼飞行器任务开始时会自动起飞到 20 米的高度;然后飞往 WP 2,途中会上升到 100 米的高度,然后等待 10 秒;然后飞行器会飞往 WP 3(途中会下降到 50 米的高度),然后返回发射位置。到达发射位置后,飞行器将着陆。飞行任务假定发射位置设置在原点。
旋翼飞行器任务规划示例¶
您可以输入航点和其他命令(见 任务指令 章节获取更多信息)。在每一行的下拉菜单中,选择您想要的命令。列标题将发生变化,显示该命令需要哪些数据。点击地图即可输入纬度和经度。高度是相对于您的发射高度/原点位置而言的,例如,如果您设置为 100 米,它就会在您上方 100 米处飞行。
默认选项 是输入新航点时的默认高度。请参见 了解 ArduPilot 中的高度 高度定义。
验证高度 意味着Mission Planner地面站将使用谷歌地球的地形数据来调整每个航点的理想高度,以反映下方地面的高度。因此,如果您的航点位于山上,如果选择了该选项,则 Mission Planner地面站 将按山的高度增加您的 ALT 设置。这是确保您不会撞山的好方法!
完成任务后,选择 写 它将被发送到 APM 并保存在 EEPROM 中。您可以通过选择 阅读.
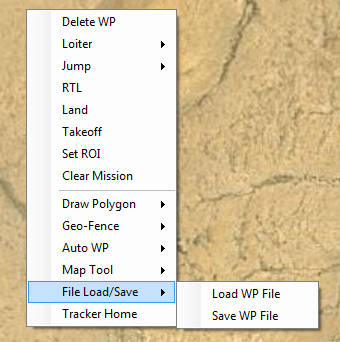
您可以通过选择 保存 WP 文件 或使用 加载 WP 文件 右键菜单:
小贴士¶
预取:您可以缓存地图数据,这样就不需要在野外访问互联网了。点击 预取 按钮,并按住 Alt 来绘制一个方框,下载所选地点的图像。
网格:它允许您绘制一个多边形(右键单击),并在所选区域内自动创建航点。请注意,它不会进行 "孤岛检测",也就是说,如果您有一个大的多边形,里面还有一个小的多边形,那么小的多边形不会被大的多边形排除在外(参见 此 更多信息)。此外,如果多边形的部分部分向后翻转(如字母 U),则中间的空地将作为天桥的一部分。
将家庭位置设置为当前位置非常简单,只需点击 主页位置 在上面输入您的家庭位置,它就会将您的家庭位置设置为当前坐标。
右键单击一端并选择 "测量距离",即可测量航点之间的距离。然后右键单击另一端并选择 测量距离 再次点击这时会打开一个对话框,显示两点之间的距离。
自动网格¶
您还可以 Mission Planner地面站 为您创建一个任务,这对于测绘任务等功能非常有用,在这些任务中,飞机只需以 "割草机 "的模式在一个区域上空来回飞行以收集照片。
为此,请在右键菜单中选择多边形,然后在要绘制的区域周围画一个方框。然后选择自动 WP、网格。按照对话框流程选择高度和间距。网格 Mission Planner地面站 然后就会生成类似这样的任务:
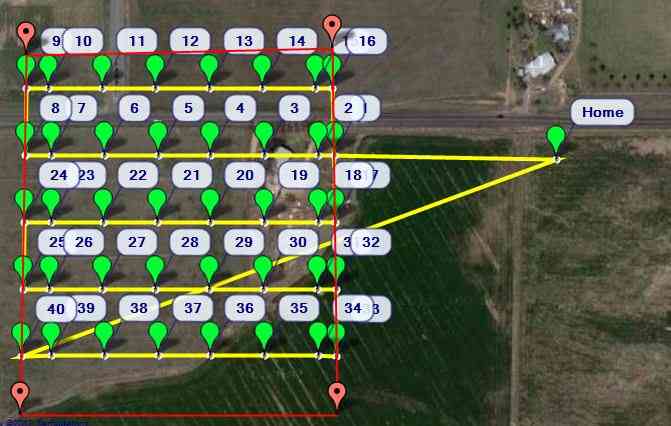
Mission Planner地面站自动生成的网格¶
任务指令¶
Mission Planner地面站 提供了适合当前飞行器类型的命令过滤列表,并为需要用户提供值的参数添加了列标题。这些命令包括前往航点和在附近停泊的导航命令、执行特定操作(如拍照)的 DO 命令以及可控制 DO 命令运行时间的条件命令。

例如LOITER_TURNS 命令的标题包括转弯次数、方向和周围位置悬停的位置。¶
所有 ArduPilot 平台都支持的全套任务命令列于 MAVLink 任务指令信息 (MAV_CMD).这包括每条命令的全名(在协议定义中定义)、支持哪些参数的信息,以及相应的 Mission Planner地面站 栏标题。
备注
Mission Planner地面站使用的是命令全名的缩略版。例如,MAV_CMD_NAV_WAYPOINT、MAV_CMD_CONDITION_DISTANCE、MAV_CMD_DO_SET_SERVO 等命令在 MP 中分别列为 WAYPOINT、CONDITION_DISTANCE 和 DO_SET_SERVO。
任务结束¶
任务列表完成后,Copter 将无限期地在最后一个航点位置悬停,直到模式改变或解除(如着陆时),Rover 将保持,但 Plane 将 RTL,除非最后一个任务项目是无限位置悬停或转弯,或者着陆。
任务重置¶
在旋翼飞行器和UGV无人车上,每次解除任务时,任务都会重置到任务列表的起始位置。在飞机上,除了在 "自动 "模式下不会在撤膛时重置,并且会将 "任务指针 "停留在要执行的最后一个任务项目上之外,其他情况都是类似重置。对于所有飞行器,任何着陆任务项目在完成着陆后都不会前进到下一个任务项目。任务指针 错误选项 参数第 2 位可以设置为着陆后在任务列表中继续前行。
可以设置 RCx_OPTION 切换功能("24")可随时将任务项目指针重置到任务列表的起始位置。
此外,还可以设置任务在进入自动模式时重置。 错误重启 参数。默认值(0)是在重新进入自动模式时恢复飞行任务。
错误选项¶
"这款" 错误选项 可以设置参数位来修改任务的功能:
参考文献MIS_OPTIONS<MIS_OPTIONS>。 马衔 |
选项 |
|---|---|
0 |
启动时清除已加载的任务。必须在每次启动后加载。 |
1(仅平面) |
使用电池故障保护装置计算着陆距离。查看 使用 DO_LAND_START |
2 |
着陆后继续。着陆完成后,将任务项目指针前进到下一个任务项目。如果没有项目,则 RTL。 |
使命再出发¶
模式变更中断时返回任务序列的行为在 恢复任务回放 节。
任务规模¶
(飞行)控制器中可存储的任务项目数量限制为大约 650 个航点。如果您需要更长的飞行任务,可以设置 BRD_SD_MISSION 参数,以便在 SD 卡上创建一个文件来存储更多航点。最大可设置为 64(kB),这样在一次飞行任务中总共可存储超过 4000 个航点。