Pixhawk 接线快速入门¶
本文提供了有关如何为 Pixhawk 供电并连接其最重要外设的高级信息。
警告
请勿将任何舵机或其他设备连接到接收机的 PWM 输出端。Pixhawk 上的 RCIN 端口仅为低功耗设备而设计,舵机或继电器可能会从接收机上消耗大量电流。如果在接收机由 Pixhawk 的 RCIN 端口供电时直接将伺服器连接到接收机上,可能会损坏 Pixhawk。
Pixhawk 接线图¶
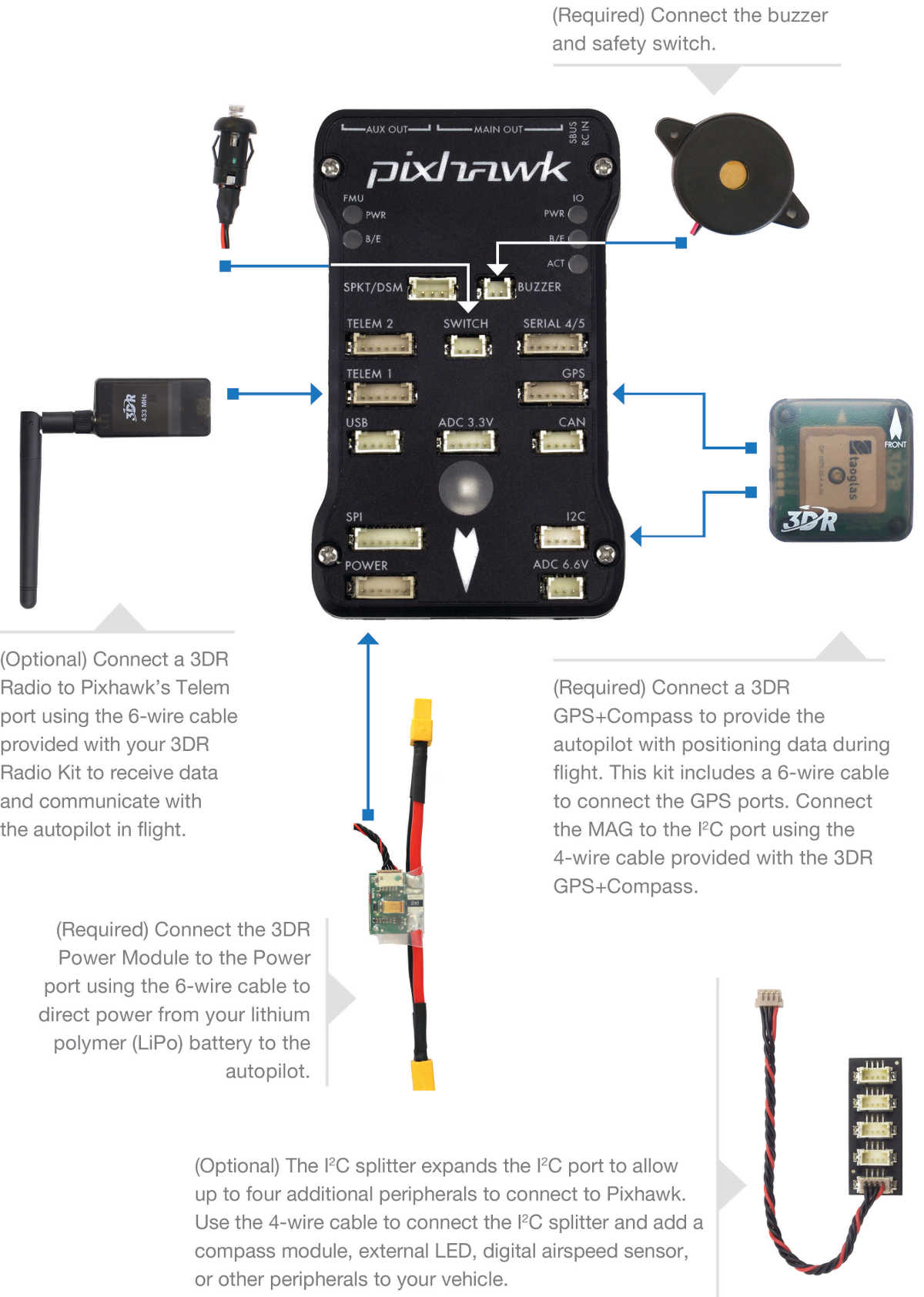
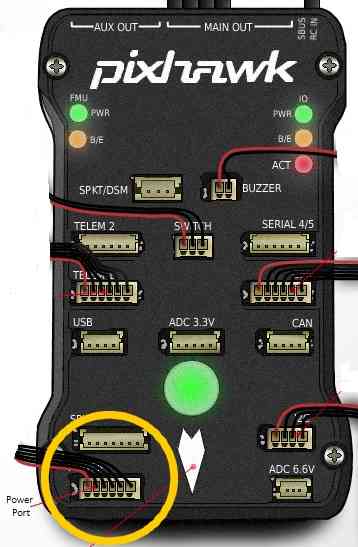
Pixhawk 电源¶
Pixhawk 通常通过其 "电源 "端口供电,如下图所示。电源端口同时为 Pixhawk 供电,并读取由可选电源模块产生的电压和电流模拟测量值。有关为 Pixhawk 供电的信息,请参阅主题 为 Pixhawk 供电.
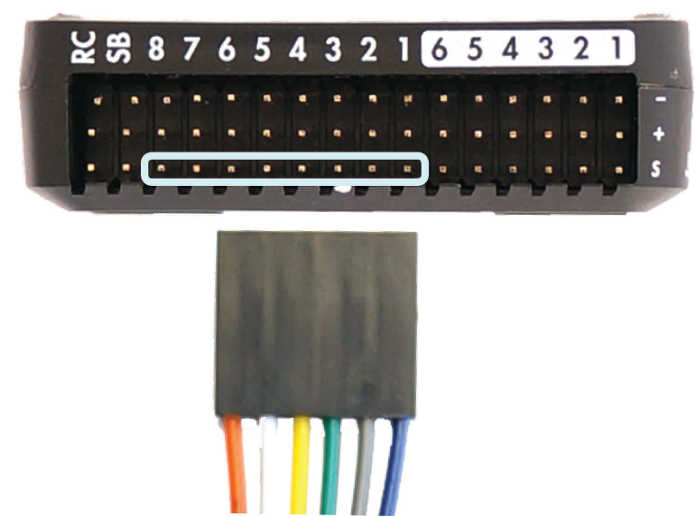
连接遥控输入¶
Pixhawk 与以下设备兼容
PPM-Sum 接收器
SBus 接收器
IBUS 接收器
对于传统的单线每通道 (PWM) 接收器,可使用 PPM 编码器将接收器输出转换为 PPM-SUM。
提示
有关兼容接收器及其连接方式的信息,请参见 无线电控制系统

FRSky Taranis 发射器¶
连接蜂鸣器和安全开关¶
Pixhawk 必须使用蜂鸣器和安全开关按钮。如图所示连接到蜂鸣器和开关端口。
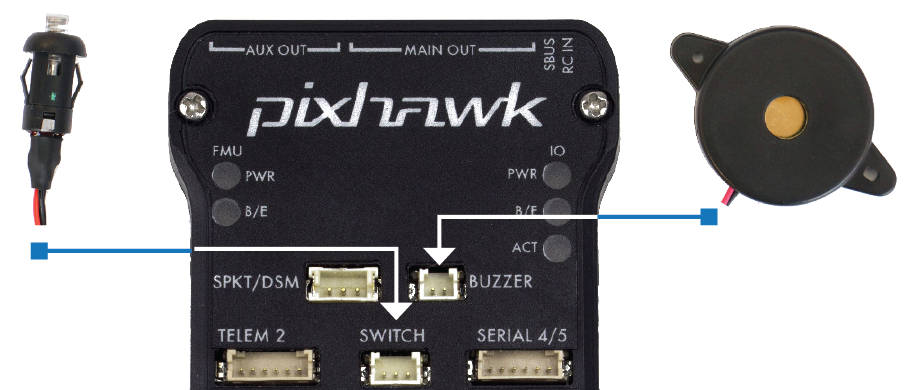
警告
将蜂鸣器安装在距离飞行控制器至少 5 厘米远的地方,否则噪音可能会干扰加速度计。
3DR GPS+指南针¶
"这款" 3DR UBlox GPS + 指南针模块 是 ArduPilot 上 Pixhawk 推荐使用的 GPS。GPS 端口通过六位 DF13 电缆连接,MAG 端口通过四位 DF13 电缆连接到 I2C 端口。
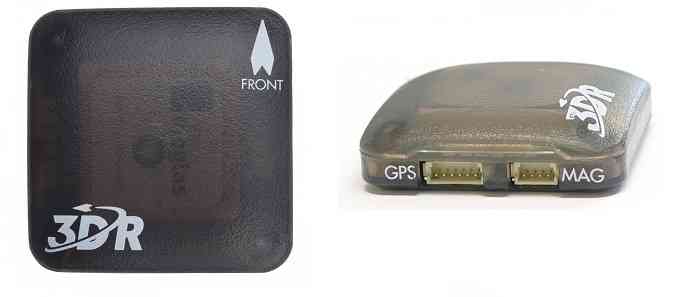
3DR UBlox GPS + 指南针模块¶
主题 3DR UBlox GPS + 指南针模块 说明了如何连接到 Pixhawk,还包括其他配置和安装信息。
连接电机¶
对于路虎车,将油门和转向线连接到主输出信号引脚上:
针脚 3 = 节流器
针脚 1 = 转向
滑移转向参数用于配置具有固定车轮并像坦克履带一样转向的载具(不使用伺服系统转向车轮,而是使用左右车轮之间的差速)。这些参数是SKID_STEER_OUT 和 SKID_STEER_IN。启用后,(飞行)控制器的输出 RC1 用于左轨道控制,输出 RC3 用于右轨道控制。
连接其他外设¶
根据硬件的不同,还可能连接其他外围设备,包括传感器、摄像头、机械手等。这些外围设备可以在主题的子页面中找到 可选硬件.
有关将这些外设连接到 Pixhawk 的信息,请参见相应页面。