出现问题时¶
ArduPilot 具有极高的性能和灵活性。但高性能和灵活性也带来了大量的配置、参数和复杂性。
本 WIKI 文档试图通过提供尽可能多的有关配置、参数和操作模式的准确信息来减少配置和操作基于 ArduPilot 的载具的工作量,并随着新版本的发布或需要进一步解释的领域的出现而不断更新。欢迎并寻求您的帮助。请参阅 维基编辑指南
备注
如果您在诊断自己无法通过以下建议解决的问题时寻求他人帮助,启用和使用 ArduPilot 的日志功能通常是一项关键要求。
遇到问题时该怎么办¶
载具无法启动¶
参见 臂前安全检查.除工作台设置测试外,请勿禁用上膛检查。这样做会使您的载具面临碰撞风险。在操作载具之前,请务必查明上膛前检查失败的原因并加以纠正!
电动载具的干扰问题¶
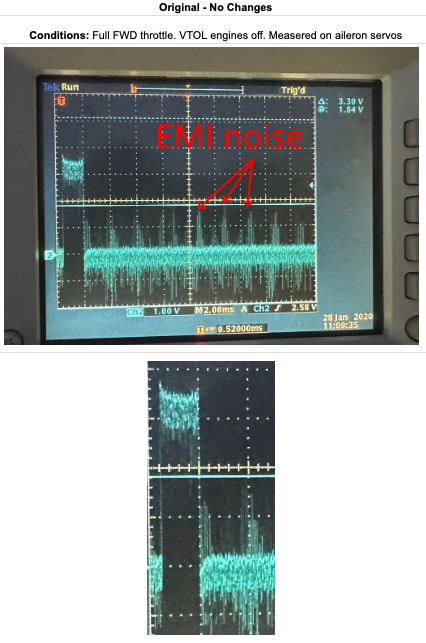
在靠近电调或伺服控制线路的地方为电机铺设大电流线路,可能会因电磁耦合而干扰这些外围设备的控制。下面是一段副翼舵机因邻近电机大电流布线产生的感应噪声而导致工作中断的视频:
要解决这个问题,可以将电源线和信号线分开几英寸,或者使用噪音承受能力更强的伺服器,如 DroneCAN 伺服器。
另见 电调信号问题 对于类似的问题,也可以使用电解质干细胞。
旋翼飞行器常见问题¶
新的旋翼飞行器起飞后立即翻转。这通常是由于马达顺序不正确、旋转方向错误或使用了错误的螺旋桨(顺时针与逆时针)造成的。检查(飞行)控制器的遥控连接。
飞行器在滚动轴或俯仰轴上摇摆。这通常意味着速率 P 值不正确。请参见 飞行稳定调整 有关如何调整这些增益的提示,请参阅 "如何调整增益 "一节。
旋翼飞行器在快速下降时摇摆。这是由于旋翼飞行器在下降过程中受到螺旋桨冲刷造成的,虽然提高 "滚动率/螺距 P "值可能会有所帮助,但几乎不可能解决这个问题。
旋翼飞行器起飞时会向右或向左偏航 15 度。有些发动机可能不直或 电调尚未校准.
即使在无风的环境中,旋翼飞行器也总是倾向于向一个方向飞行。尝试 SaveTrim 或 AutoTrim 将旋翼飞行器调平。
即使飞行员拉下油门,旋翼飞行器也会迅速爬升。这可能是高振动造成的。参见 https://ardupilot.org/copter/docs/common-vibration-damping.html 改进隔振的方法。
滚动或俯仰时有时无。通常是由于接收器受到某种干扰(例如,FPV 设备离接收器太近)或电调出现问题,可通过以下方法解决 校准.
飞行过程中突然翻转。这几乎总是由以下原因造成的 机械故障 电动机或电调。
可用内存问题¶
在初始化过程中,某些功能/子系统可能无法获得足够的内存分配。有时会有提示,例如内存不足无法启动 LUA 脚本:"脚本需要更大的最小堆栈大小",或者对于地形:"地形:分配失败 "等。此外,可用内存不足也会导致指南针校准失败或 MAVftp 无法初始化。请参见 内存限制 了解更多信息。
H7 (飞行)控制器无法初始化¶
使用 H7 系列处理器的(飞行)控制器在极少数情况下会进入无法完成初始化的状态。症状是:始终无法退出引导加载程序(上电后指示灯快速闪烁,从未停止)或(飞行)控制器在初始化过程中冻结,无法与其连接。
据认为,这可能是内存损坏问题,可由中断闪存写入(如更改参数时)引起。遗憾的是,由于处理器的结构原因,固件无法自动纠正这一问题。如果(飞行)控制器似乎 "瘫痪 "了,请尝试将(飞行)控制器完全重置到完全未编程的状态。这样就可以安装固件并解决损坏问题。
然后,从以下地址为您的(飞行)控制器下载 ArduPilot 引导加载程序 这里.然后使用该引导加载程序文件重复上述步骤。这将在(飞行)控制器上安装引导加载程序。打开(飞行)控制器的电源。此时(飞行)控制器将启动并保持在引导加载程序中,直到安装了可运行的固件。
最后,使用Mission Planner地面站的 "设置/安装固件 "选项卡或 上传者 python 脚本,以加载所需的 ArduPilot 固件版本。
这样就能解决内存损坏造成的问题,恢复正常运行。