电子调速器(ESC)校准¶
备注
本文件仅适用于旋翼飞行器设置,不适用于漫游车或飞机。有关电调校准,请参阅这些飞行器的设置指南
电子调速器负责按照(飞行)控制器要求的速度旋转发动机。大多数电子调速器都需要校准,以便了解飞行控制器发送的最小和最大 pwm 值。本页提供了校准电调的说明。
备注
请填写 无线电校准 在进行电调校准之前,请先检查电调是否正常运行。
关于电调校准¶
电调校准因所使用的电调品牌而异,因此请务必参阅所使用的电调品牌的文档以了解具体信息(如音调)。"一次性 "校准对大多数电调都很有效,因此最好先尝试一下,如果失败,再尝试 "逐个电调手动 "方法。
参考 PWM、OneShot 和 OneShot125 电子调速器 用于设置 ESC 协议 (MOT_PWM_TYPE) 根据您的电调类型而定。
有些电调(如大疆光电调)不需要也不支持校准,因此请完全跳过此页。
如果您使用的是数字电调协议(如 DShot)或 CAN 电调,则无需校准,因此请跳过此页。不过,末尾关于电调设置的部分仍然适用。
某些品牌的电调不允许校准,除非您调整无线电的油门端点,使最小油门约为 1000 PWM,最大约为 2000 PWM,否则电调不会启动。请注意,如果更改 TX 上的端点,则必须重新执行 无线电校准.或者,您也可以手动设置 MOT_PWM_MIN 到 1000 和 MOT_PWM_MAX 到 2000 年。
只有在完成以下操作后,才能开始此程序 无线电遥控校准 和 连接电调和电机 的一部分 (飞行)控制器系统组装说明.接下来按照以下步骤操作:
警告
安全检查!
在校准电调之前,请确保您的旋翼飞行器上没有任何道具,并且(飞行)控制器没有通过 USB 与计算机连接,锂电池也没有断开连接。


一次性校准¶
打开发射机,将油门杆调至最大。

连接锂电池。(飞行)控制器的红色、蓝色和黄色 LED 灯将循环亮起。这意味着下次插入电源时,它已准备好进入电调校准模式。
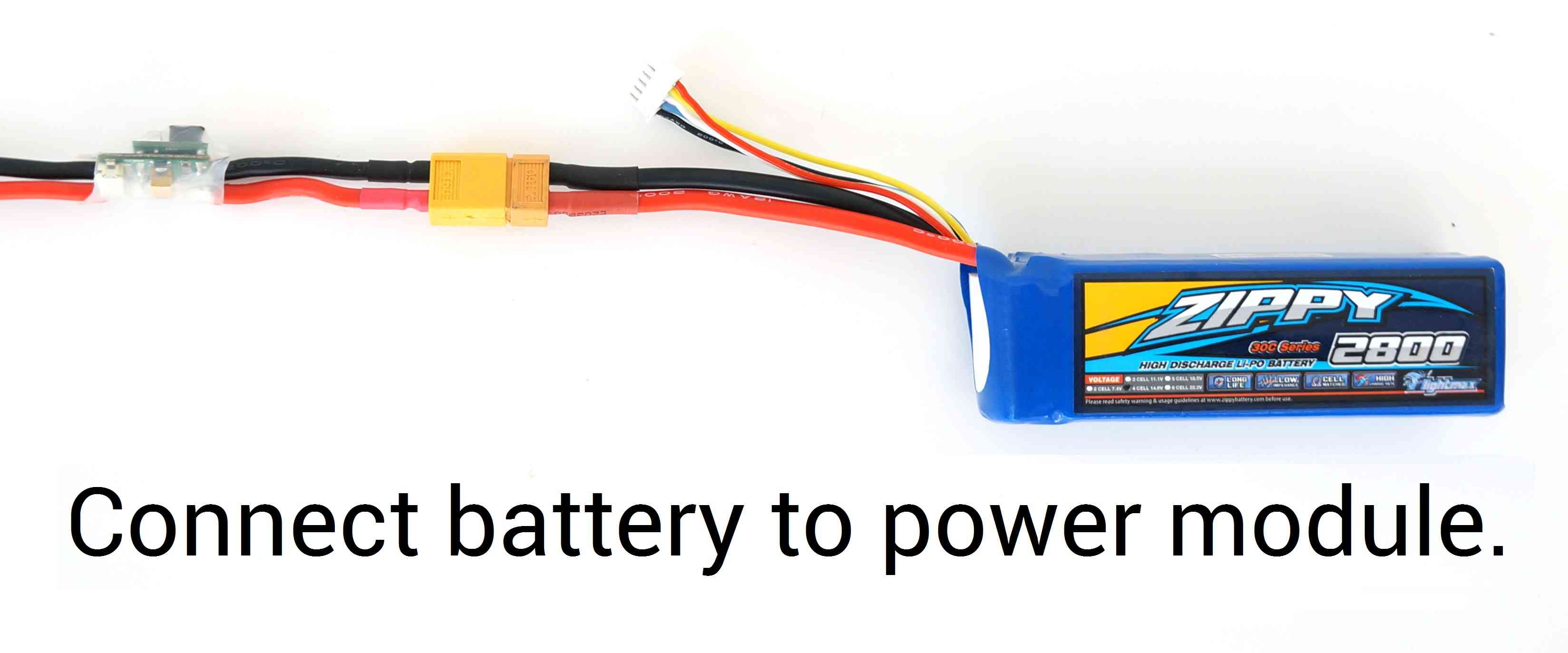
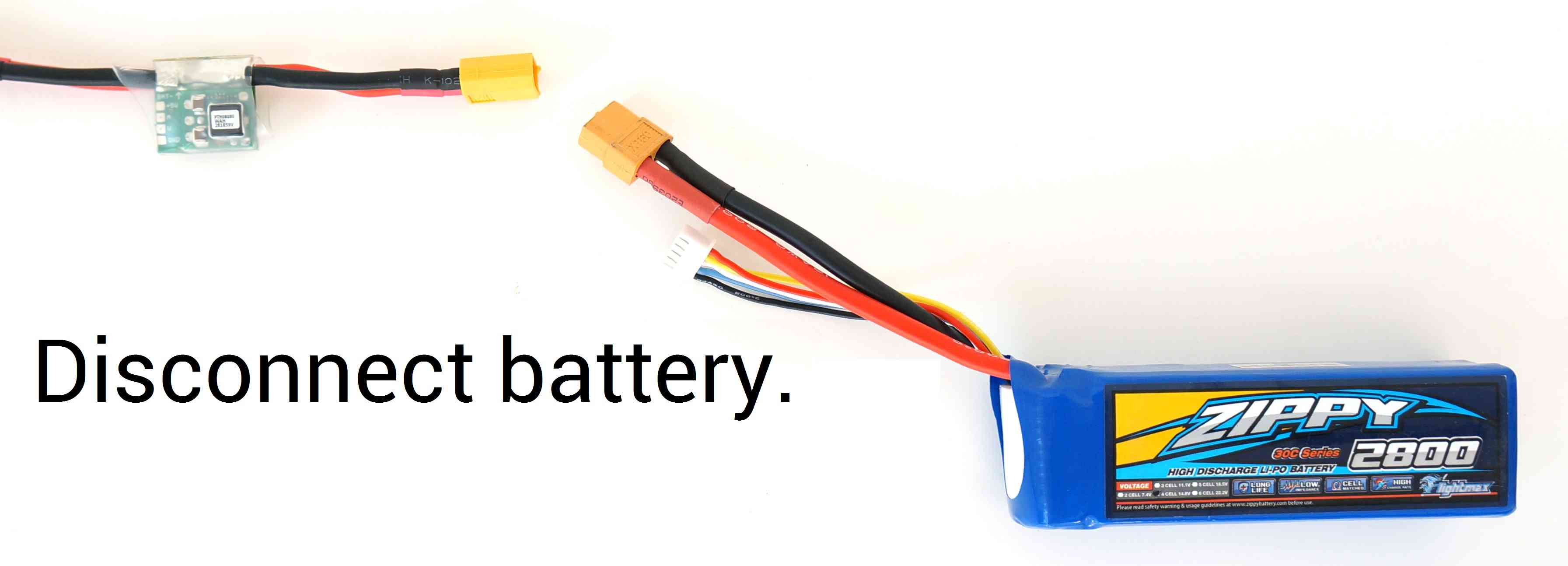
发射机油门杆仍处于高位时,断开并重新连接电池。
对于带有安全开关的(飞行)控制器,按下安全开关直到 LED 显示为红色。
(飞行)控制器现在处于电调校准模式。
等待电调发出音乐声、表示电池单元数的常规哔声(如 3S 电池为 3 声,4S 电池为 4 声),然后再发出两声哔声,表示已捕捉到最大油门。
将发射机的油门杆拉到最小位置。

然后,电调应发出一声长音,表示已捕捉到最小油门,校准已完成。
如果听到表示校准成功的长音,则说明电调已 "启动",如果稍微抬高油门,电调应该会旋转。稍稍抬高油门,然后再降低油门,测试电机是否旋转。
将油门调至最小,然后断开电池连接,退出电调校准模式。
下面是一段演示过程的视频:
逐个电调手动校准¶
将一根电调三线电缆插入遥控接收机的油门通道。(通常是通道 3)。
打开发射机,将油门杆调至最大(全开)。
连接锂电池
您将听到一声音乐,然后是两声嘟嘟声。
发出两声提示音后,将油门杆完全向下。
然后,您会听到几声蜂鸣声(每使用一节电池发出一声蜂鸣声),最后听到一声长蜂鸣声,表明终点已设定,电调已校准。
断开电池连接。对所有电调重复上述步骤。
如果看来电调没有校准,那么发射机上的油门通道可能需要反转。
如果尝试了这些方法后仍有问题(例如,电调仍在不断发出哔哔声),请尝试将油门微调降低 50%。
您也可以尝试先通过 USB 为 ArduPilot 板供电,以便在插入锂电池之前启动它。
半自动逐个电调校准¶
从地面站(如Mission Planner地面站)连接到(飞行)控制器,并设置 校准 参数调至 3
断开电池和 USB 电缆,使(飞行)控制器断电
连接电池
将播放上膛提示音(如果载具上有蜂鸣器)。
如果使用的(飞行)控制器带有安全按钮(如 Pixhawk),则按下该按钮,直到显示纯红色
您将听到一声音乐,然后是两声嘟嘟声
几秒钟后,您会听到几声蜂鸣声(每使用一节电池发出一声蜂鸣声),最后听到一声长蜂鸣声,表明终点已设定,电调已校准。
断开电池连接,重新正常通电,并进行如下测试
测试¶
校准电调后,就可以插入锂电池进行测试。记住:不要使用螺旋桨!
确保发射机的飞行模式开关设置为 "稳定模式"。
给少量油门。所有电机都应以大致相同的速度旋转,并同时启动。如果电机没有同时启动并以相同的速度旋转,则说明电调仍未正确校准。
解除旋翼飞行器上膛
备注/故障排除¶
一次完成电调校准模式只是让(飞行)控制器直接将飞行员的油门信号传递给电调。如果在此模式下启动(飞行)控制器,就会向所有电调发送相同的 PWM 信号。这就是它的作用。许多电调在启动时使用全油门进入编程模式,然后将全油门位置保存为上端点,当您将油门降至零时,该位置将保存为下端点。
如果校准后电机旋转速度和启动时间不一致,请重复校准过程。如果您尝试了上述自动校准,但没有成功,或者电调无法以相同的速度驱动电机,请尝试上述手动校准方法。这种方法几乎每次都能奏效。(在完全手动校准后,您还需要进行额外的最终自动校准,这种情况很少见)。
最后,有大量品牌和类型的电调可供使用,其中一些并不遵守正常的编程惯例(有时即使它们声称遵守),它们可能根本无法以现在的方式与 ArduPilot 配合使用。不幸的是,这是一个必要但真实的免责声明。
建议的电调设置如下:¶
停止时制动:关闭
主动制动/"阻尼灯":开(也称为 "非阻尼模式",设置为关)
低电压保护:关(或者,您可以将电池类型设置为 Ni-xx(镍氢或镍镉)(即使您使用的是锂聚合物电池,因为此设置可降低电调的低电压检测关闭电机的可能性)
切断模式:软切断(默认)
截止阈值:低
启动模式:正常(默认)
计时:中等