合作伙伴支持代理¶
本页将告诉您如何利用 ArduPilot MAVLink 支持代理,网址为 support.ardupilot.org.您可能是被 ArduPilot 支持工程师引导到这里的,他们希望您使用代理服务器允许支持工程师连接到您的载具为您提供帮助。
关于支持代理¶
ArduPilot 合作伙伴支持代理允许运行 ArduPilot 的载具用户连接到支持工程师。主要功能
使用 MAVLink2 签名来维护安全性
用户或支持工程师都不需要公共 IP 地址
连接到支持代理¶
支持工程师会给您一个号码,您在连接时应使用该号码。这是一个 5 或 6 位数字。在下图中,我们将使用 "10001 "作为示例。请将其替换为您被告知使用的号码。
要开始使用,请选择 MissionPlanner 中设置->高级下的支持代理选项:
如果您没有看到该选项,则说明您使用的是旧版本的 MissionPlanner,应更新到最新版本。
然后输入支持工程师为您提供的 5 或 6 位 ID,并按连接:
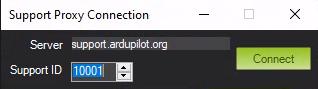
此时您正在将 mavlink 数据流传输到代理服务器。支持人员将能够连接并帮助您。您可以单击 "停止 "按钮停止转发链接。
备注
完成支持会话后,请完全关闭 MissionPlanner,以确保端口已释放。
连接 QGroundControl¶
要从 QGroundControl 将您的连接转发给支持工程师,您需要使用此配置设置:
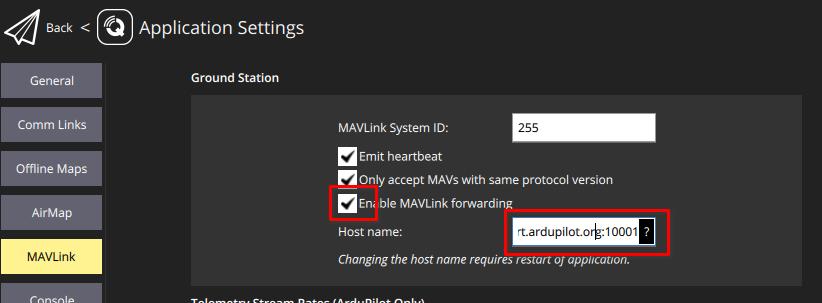
您需要输入 support.ardupilot.org:XXXXX,其中 XXXXX 是支持工程师给您的支持端口号。
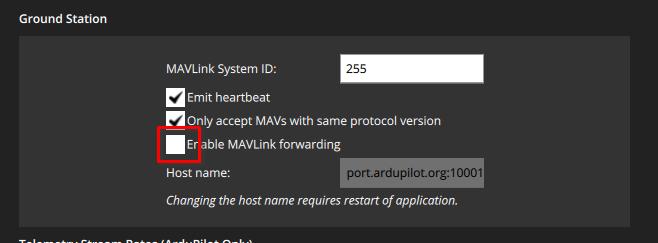
备注
请记得在支持会话结束后取消勾选 "启用 MAVLink 转发 "选项!
使用 MavProxy 连接¶
如果使用 mavproxy 而不是 MissionPlanner,则应像这样添加连接:
mavproxy.py --游戏机 --地图 --向外 支持.ardupilot.组织:10001
或者您也可以在已经连接的会话中执行 "output add support.ardupilot.org:10001"。
CAN 管理¶
请注意,由于可以通过 MAVLink 获取 CAN 数据包,因此可以通过代理远程配置 DroneCAN 设备。使用设置->可选硬件->DroneCAN 中的 MAVLink-CAN1 或 MAVLink-CAN2 按钮开始查看远程 CAN 总线。