连接支持工程师¶
备注
本页面仅供 ArduPilot 支持工程师使用。如果您是合作伙伴或用户,请参阅 合作伙伴支持代理 以获取说明。
如果您是支持工程师,您将获得 3 条信息:
您要连接的端口号
用户将连接的端口号
初始随机生成的 MAVLink2 签名通行短语
备注
计算机系统时钟必须准确无误,代理才能正常工作。如果误差超过一分钟,则可能导致签名失败。
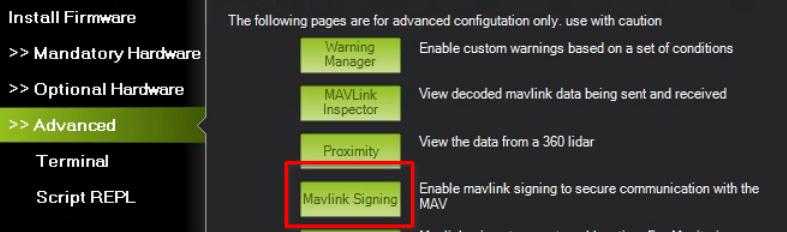
要为 MissionPlanner 设置支持代理端口,您需要使用高级->Mavlink 签名工具:
在该工具中,你需要使用给定的通行短语创建一个签名密钥:
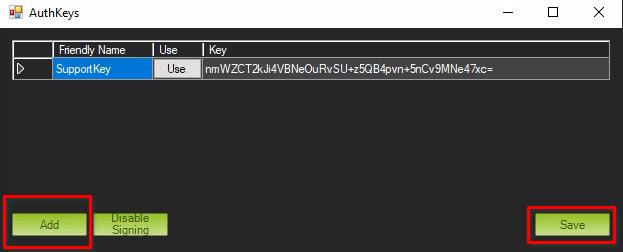
使用 "添加 "按钮添加密钥,使用 "保存 "按钮保存密钥。
设置好签名密钥后,您就可以开始接受用户连接了。您应引导用户阅读本页顶部的说明。
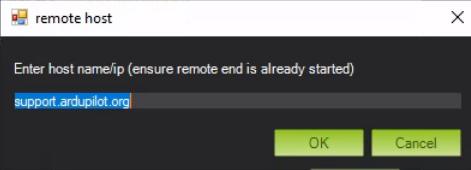
使用 MissionPlanner 中的 UDPCI 连接方法连接到您的代理端:

按连接后,选择 "support.ardupilot.org "作为主机:
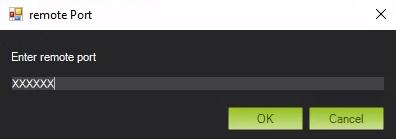
和您的支持工程师端口号作为端口:
要更改连接时使用的密码短语,可在 MAVLink 签名工具中创建并保存一个新密钥,然后选择该密钥并按下 "使用 "按钮:
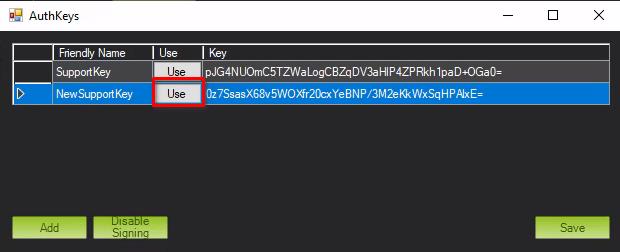
按 "使用 "键将更新您的支持 ID 的签名密钥。
如需技术支持,请通过 Discord 上的合作伙伴支持频道联系 Andrew Tridgell。
实用小贴士¶
在帮助用户进行远程调试时,让他们运行以下命令 LUA Applet 在出现问题时允许您立即恢复所有调整,这可能会很有用。
将 MAVProxy 用作支持工程师¶
使用 MAVProxy 以支持工程师身份连接的 shell 脚本示例如下 可在此查阅.
DroneCAN GUI 工具¶
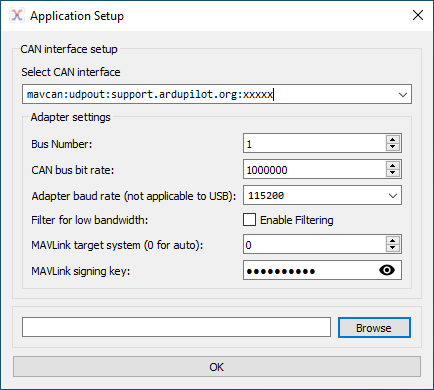
输入 "mavcan:udpout:support.ardupilot.org:",然后输入 CAN 接口的支持工程师端口号,并添加签名密钥。
备注
DroneCAN GUI 工具中的签名密钥是在密钥生成过程中输入Mission Planner地面站的密码。它不是Mission Planner地面站显示的密钥。
源代码¶
UDPProxy 工具的源代码以及在个人计算机上安装该工具的说明如下 可在此查阅.