GPS 混合(又称双 GPS)¶
GPS 混合功能结合了两个 GPS 的读数。使用两个 GPS 可以减少影响载具的故障。
只有报告位置和速度精度的 GPS 才能用于混合。所有 UBlox GPS 都提供这些额外信息,而使用 NMEA 协议的 GPS 一般不提供这些信息。
通常情况下,应使用同一制造商生产的两个 GPS 进行混合,因为精确度数字的缩放比例不同,会导致一个 GPS 优于另一个 GPS。
通过地面站进行设置¶
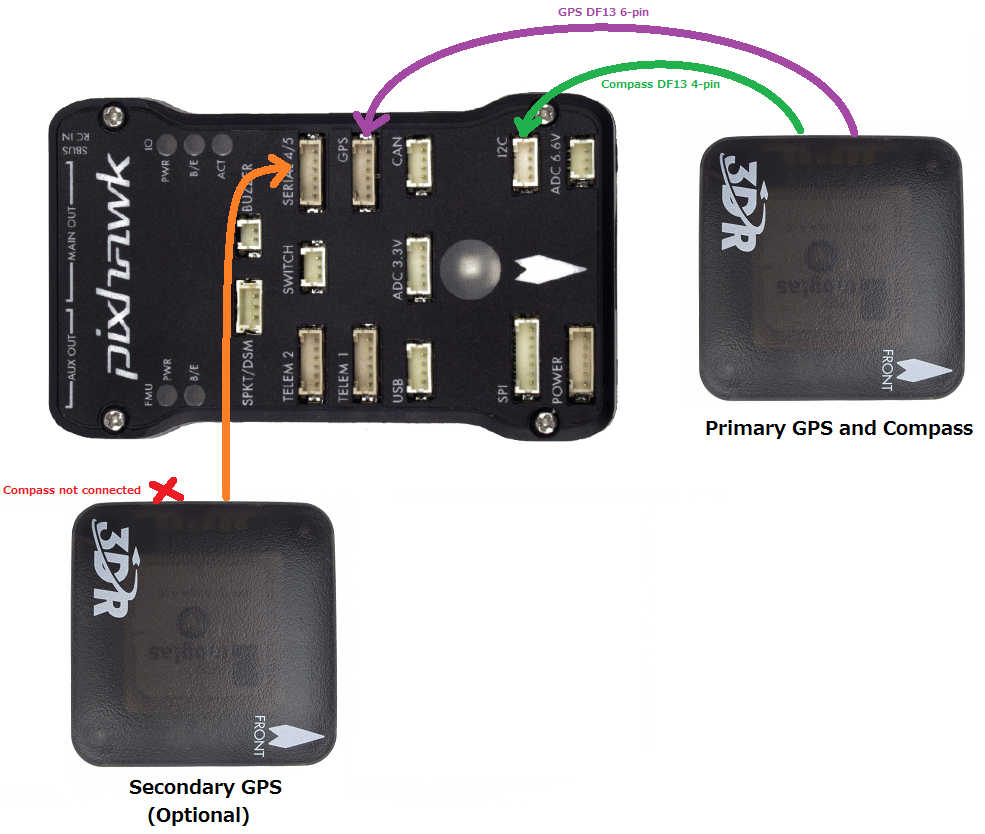
serial4_protocol = 5 /"GPS"。也可以使用遥测端口 1 或 2,方法是设置 serial1_protocol 或 serial2_protocol 至 5。
GPS2_TYPE = 1 /"AUTO "或与 GPS 类型相对应的特定编号
gps_auto_switch = 2 /"混合"。或者设置为 1 /"UseBest",只使用较好的 GPS。更好的 GPS 是根据 GPS 自报的精确度决定的。
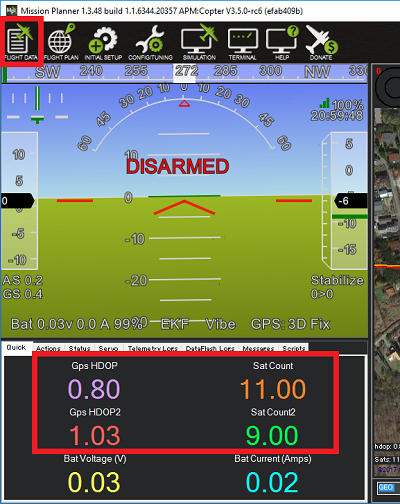
重启电路板后,两个 GPS 的状态、hdop 和卫星计数都应该可以看到。
数据闪存记录¶
第一个 GPS 的数据在 GPS 和 GPA 信息中的实例编号为 0。(即 GPS[0].x, GPA[0].x 信息)第二个 GPS 的数据在 GPS 和 GPA 信息中的实例编号为 1。混合 GPS 数据在 GPS 和 GPA 信息中的实例编号为 2。
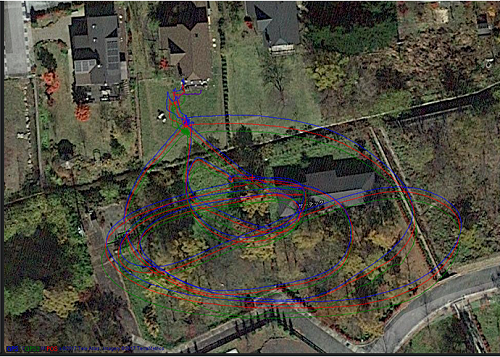
如果使用Mission Planner地面站,打开数据闪存日志并点击 "显示地图",将显示两个 GPS、混合位置和 EKF 的最终估计值(显示为 "POS")。
视频¶
使用混合 GPS、光流和激光雷达测距仪拍摄的重载 IRIS 视频