无线电控制系统¶

本文概述了可与 ArduPilot (飞行)控制器配合使用的遥控发射机和接收机系统。
兼容遥控协议¶
ArduPilot (飞行)控制器与以下接收器输出协议兼容:
PPM-Sum 接收器
SBus 接收器
快速 SBus(来自 DJI HDL 视频/RC 系统)
IBUS 接收器
CRSF 接收机 (包括 ExpressLRS 系统)
DroneCAN 外设可在外设上解码这些遥控协议,并将其传递给(飞行)控制器
使用外部编码器将并行 PWM 输出编码为 PPM-Sum(见下文)。
连接接收器¶
对于上述所有协议,ArduPilot 会自动检测遥控接收器系统的协议。不过,根据协议和(飞行)控制器类型的不同,与(飞行)控制器的物理连接可能会有所不同。
某些协议,特别是 SRXL2、CRSF 和 ELRS,需要完整的 UART 连接。
此外,其他也提供遥测功能的协议,如 FPort,通常需要双向半双工连接才能获得遥测功能。对于这些协议,UART 的 TX 输出应连接到接收器的串行输入。F7 和 H7 电路板也可以通过一些额外的配置连接到 UART RX 输入。
PPM-Sum/SBus/IBus¶
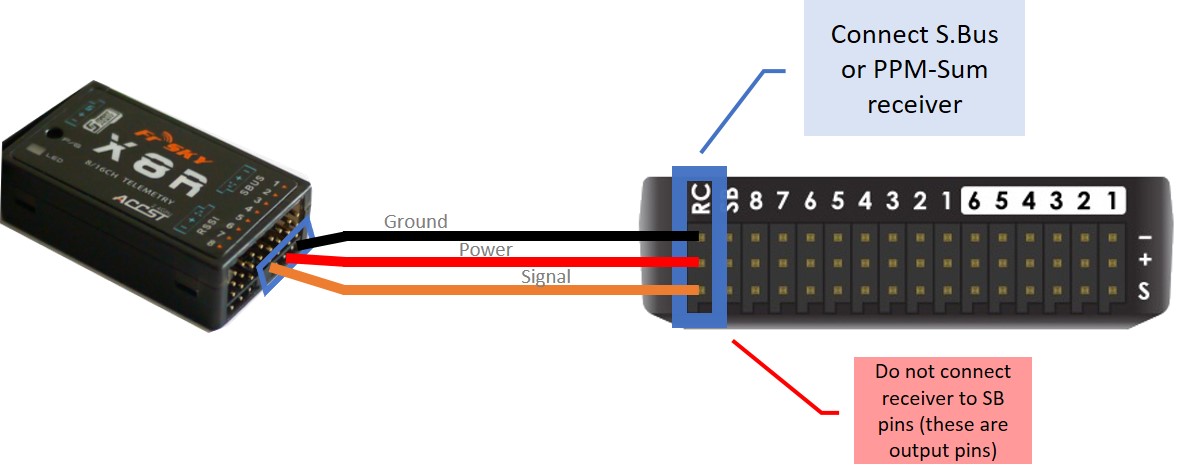
这些接收器通常连接到(飞行)控制器上的 RCin 或 SBUS 输入引脚。
例如,要将 PPM-Sum 接收器或 SBus 接收器连接到 Pixhawk,可将接地线(黑色)、电源线(红色)和信号线(通常为白色,下图中为橙色)插入 Pixhawk 的 RC 引脚。
提示
启用 PixHawk (飞行)控制器 SBus 输出的参数是 BRD_SBUS_OUT.这仅用于将 SBus 从外部传递给其他设备,如舵机。不能将接收器连接到 RCin 或 SBus In。
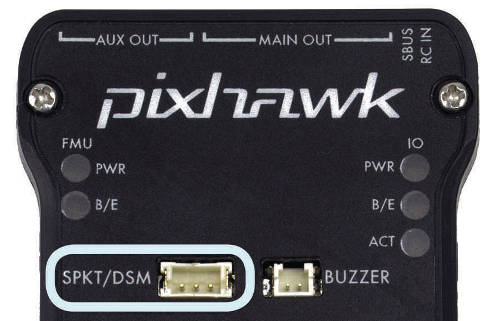
DSM/DSM2/DSM-X/SRXL/SUM-D¶
如果(飞行)控制器不提供单独的 DSM 输入,可按上述方式连接。不过,出于使用 IOMCU 的(飞行)控制器(Pixhawk/Cube 系列)的性能考虑,(飞行)控制器的 DSM 强烈建议使用输入连接。
FPort/FPort2¶
FPort 是一种双向协议,一个方向使用 SBus RC,另一个方向使用串行遥测技术。当连接到(飞行)控制器时,RC 部分可以像 SBus 一样被解码,但内嵌的遥测数据将丢失。请参见 FPort 设置文件 连接到(飞行)控制器串行端口的详细信息。
毫升¶
mLRS 接收机有一个 RC 输出引脚,可配置为 SBUS 或 CRSF 协议(CRSF 仅用于 RC 数据)。对于 SBUS,可将其连接到(飞行)控制器的 RCin 引脚。对于 CRSF 或 SBUS,可将其连接到任何(飞行)控制器的 UART RX 引脚,并将该端口配置为 RC 协议。使用 CRSF 协议可将 RSSI/LQ 信息传送给(飞行)控制器。
对于可选的遥测,接收机上提供了一个单独的 TX/RX 端口,用于连接(飞行)控制器 MAVLink 遥测串行端口。如果不使用 GCS 遥控重载(例如操纵杆),您可以省略单线遥控连接,配置 mLRS 接收机通过 MAVLink 输出遥控通道。
SRXL2/CRSF/ELRS¶
这些双向协议需要使用串行端口。有关设置和连接,请参阅下面的链接。
IRC 幽灵¶
这需要通过 UART 的 TX 引脚连接到全 UART 端口。端口应设置为半双工 RC 输入:
使用 SERIAL2 作为端口:
serial2_protocol = 23(RC 输入)
serial2_options = 4(半双工)
RSSI_TYPE = 3
串行端口的 RC 输入¶
备注
如果串行端口协议设置为 23(例如,一般情况下,PPM 或 SRXL2/CRSF/ELRS 也需要连接 UART 的 TX 引脚),则任何 UART RX 输入都会自动检测所有协议(PPM 或 SRXL2/CRSF/ELRS 除外)、 serial2_protocol 如果使用 TELEM2 UART)。例外情况是 SBUS 连接到基于 F4 的(飞行)控制器的 UART。这需要外部反相器,因为 SBUS 是反相的,而 F4 (飞行)控制器的 UART 引脚上没有可选择的反相器。
备注
当检测到任何串行 RC 协议时,固件会自动设置和控制串行端口波特率。
无线电系统选择¶
选择取决于许多因素:范围、遥测要求、成本、与现有设备的兼容性等。大多数制造商都有多种不同的型号,性能也各不相同。许多系统已被其他制造商逆向设计和 "克隆",提供更经济的发射机和接收机版本。许多发射机提供多种协议,并基于 OpenTX 该固件非常灵活,还允许使用 LUA 脚本在 LCD 屏幕上显示遥测数据。
范围¶
遥控距离因所使用的系统、安装方式、使用的天线、地形甚至天气条件的不同而有很大差异。但总的来说,为了便于讨论,遥控系统可分为短程(2 千米及以下)、中程(2-10 千米)和远程(10 千米)。此外,它们还可以提供单向(载具到发射机)或双向(载具到/从发射机)遥测。
遥测¶
FrSky Horus 发射器运行 Yaapu LUA 脚本
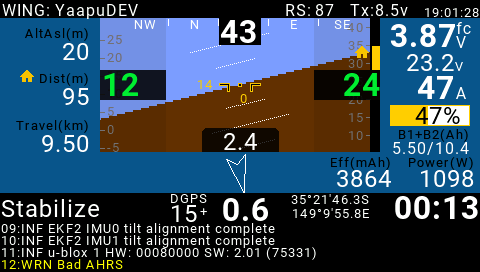
有些系统提供从(飞行)控制器发送遥测数据的透明无线电调制解调器,而其他系统则采用专有协议。那些采用专有协议的系统通常会在发射机显示屏上显示遥测数据,如 FRSky 或 OpenTX 基于发射机。
遥测速度从 56K 到 1-2K 波特不等,取决于协议和某些情况下的距离。遥测距离通常小于无线电控制距离。
咨询
通道数量¶
对于大多数飞行器来说,ArduPilot 至少需要 5 个通道,但大多数系统通常提供 8 到 16 个通道,这对于控制其他飞行器功能(如摄像头或飞行功能选项)非常方便。许多飞行器仅基本操作就需要 8 个通道,例如许多 QuadPlanes。
下表列出了一些常见的系统,显示了这些要素。请注意,并非特定制造商生产的所有版本的发射器和/或接收器都具有这些特性。注意:这种系统也有许多 "克隆 "或 "兼容 "版本,这里只列出原始设备制造商的系统。
原始制造商 |
范围 |
遥测 |
Telem 速度 |
TX 显示屏 |
RC 协议 |
说明 |
|---|---|---|---|---|---|---|
龙联 |
长 |
双向 |
56K |
通过 MTP/LUA |
PPM_SUM/SBUS |
1 |
CRSF |
长 |
双向 |
可变 |
是 |
SBUS/CRSF |
3 |
ELRS |
长 |
是 |
CRSF |
4 |
||
弗莱斯基 |
短 |
没有 |
IBus |
|||
FrSky X 系列 |
短 |
双向 |
中型 |
是 |
PPM-SUM/SBUS/ FPort |
2 |
FrSky R9 系列 |
中型 |
双向 |
中型 |
是 |
PPM-SUM/SBUS/ FPort |
2 |
双叶 |
短 |
没有 |
SBus |
|||
格劳普纳 |
短 |
是 |
中型 |
是 |
SUM-D |
|
IRC 幽灵 |
中型 |
特定供应商 |
是 |
IRC 幽灵 |
||
毫升 |
长 |
双向 |
12K - 91K |
通过 LUA |
SBUS/CRSF |
5 |
多路复用 |
短 |
没有 |
SRXL |
|||
Spektrum |
短 |
特定供应商 |
是 |
DSM/DSM2 DSM-X/SRXL |
注 1:DragonLink 为遥测提供 56Kbaud 透明链路,允许从发射机模块与飞行器之间进行完整的 MAVLink 遥测。Dragonlink 是发射机的附加模块,如 FRSky Taranis 或 RadioMaster T16。参见 龙联遥控系统. MTP(Mavlink 转 Passthru)转换器 可用于在 OpenTX 发射机上直接显示 MAVLink 遥测数据。 雅浦遥测 LUA 脚本.
注 2:见 用于 OpenTX 的 Yaapu FrSky 遥测脚本.除了显示遥测数据外,还可以通过 FRSky 遥测从兼容 Open TX 的发射机更改参数。大多数 FRSky 兼容发射机使用 OpenTX.请注意,R9 系统并不完全是远程系统,但比普通的 FRSky 系统距离更远,本身处于短程类别的高端,距离为 1.6-2 千米。
注 3:ArduPilot 提供了一种通过 CRSF 发送遥测数据的方法,以便将数据显示在 OpenTX 使用 雅浦遥测 LUA 脚本.除了显示遥测数据外,还可以通过与 Open TX 兼容的发射机的 CRSF 遥测功能更改参数。参见 TBS 交火遥测
注 4:ELRS(EpressLRS)是一种使用 CRSF(TBS 交火)遥控协议的系统,它对系统进行了多项最小化以简化系统。它的功能有所减少,但在使用完整的 UART(而不是 SBUS 协议)连接 CRSF RX 与 ArduPilot 通信时,它可以像 CRSF 一样连接 ArduPilot。请参见 ExpressLRS 网站 <https://www.expresslrs.org/2.0/>; 了解更多信息。
注 5:mLRS 项目是专为携带遥控和 MAVLink 而设计的固件。可用遥测速度因所选模式而异,并通过 RADIO_STATUS 流量控制进行管理。它在接收器和发射模块上使用 CRSF(TBS 交火)遥控协议。它还通过 Tx 模块和接收器上的串行连接集成了完整的 MAVLink 遥测功能。
注 6:Vendor Specific Telem 意味着它们可以在载具上添加传感器,并可以在特定 Vendor Specific TX 上显示信息,但不能将 ArduPilot 遥测数据从载具发送到 ArduPilot 兼容的 GCS 或 OpenTX 显示脚本。
无线电控制系统链接¶
没有集成遥测功能:
带集成遥测功能:
多协议:
建议:¶
由于性能、特点和成本差异很大,因此很难做出推荐。
在欧洲,Multiplex 和 Graupner 是成熟的系统,符合欧盟的辐射建议(许多其他品牌也可供选择)。
FLYSKY 生产成本极低的低端系统。
FRSky 和 Spektrum 拥有最大的基础,其中 Spektrum 在公园飞行器和入门级遥控系统中占主导地位。FRSky 具有遥测功能,并利用 OpenTX 它非常灵活,并在固件中不断增加功能。
Jumper T16 和 RadioMaster T16 是基于 FRSky Horus-like OpenTX 的克隆发射机,内置多种遥控协议。
PPM 编码器¶
A PPM 编码器 这样,您就可以使用任何旧式遥控接收器,这些接收器每个通道只有 PWM 输出,而没有 SBUS 或 PPM 输出。参见 PPM 编码器 了解更多信息。