垂直起降自动飞行任务¶
您可以要求 QuadPlane 代码飞行 自动 从自动垂直起飞,到固定翼和 VTOL 航点混合以及 VTOL 自动着陆,它都能胜任。因此,这是一款用途极为广泛的飞机,能够执行垂直起降的远程任务。
自动 VTOL 起飞¶
在 QuadPlane 中,最常用的 VTOL 任务指令是自动 VTOL 起飞。要使用 VTOL 起飞,您需要像往常一样使用地面站任务编辑器规划自动任务,但不要使用固定翼起飞的 NAV_TAKEOFF 命令,而是使用 VTOL 起飞的 NAV_VTOL_TAKEOFF 命令。
NAV_VTOL_TAKEOFF 的唯一参数是起飞点上方的高度,在此高度上起飞完成。执行后,飞机将以 Q_WP_SPEED_UP.一旦达到该高度,飞机将飞往下一个航点,并根据需要过渡到固定翼飞行。NAV_VTOL_TAKEOFF 命令中的经纬度将被忽略。
如果在飞行过程中执行了 NAV_VTOL_TAKEOFF,飞行器将进入 VTOL 模式,并按照高度参数中给定的高度爬升,超过当前高度。这种行为可以通过使用"...... "参数中的 "尊重起飞帧 "位来修改。 Q_OPTIONS 位掩码,如果已经达到或超过参数设置的高度,则跳到下一条命令,或者爬升到该高度。
为了防止起落架在起飞开始时因 GPS 噪音而拖动,您可以设置 Q_NAVALT_MIN 在达到该高度之前,滚转和俯仰将强制为零。此时,导航(即在起飞爬升过程中在原地徘徊)将会激活。
自动 VTOL 降落¶
执行自动 VTOL 降落有几种方法。最简单的方法是在任务中加入 NAV_VTOL_LAND 命令。该命令应使用零高度,并包含着陆位置的经纬度。
4.1 之前的版本¶
在 4.1 之前的固件版本中,使用 NAV_VTOL_LAND 航点时,该航点与前一个航点之间的水平间距必须适当。一旦飞机在 NAV_VTOL_LAND 航点上开始飞行,它就会过渡到 VTOL 飞行,这意味着它开始飞行时的速度要比固定翼飞行时慢得多。因此,您需要将前一个航点与着陆点保持适当的距离。如果距离着陆点太远,飞机将花费大量时间进行 VTOL 飞行,这将浪费电池。如果离着陆点太近,飞机将不得不急停才能着陆。
对于大多数小型四旋翼飞机来说,从最后一个航点到着陆点的距离在 60 米到 80 米之间即可。对于较大型、飞行速度较快的垂直起降固定翼飞行器,则需要更大的距离。
还要确保最后一个航点的高度选择在合理的着陆高度范围内。当飞机在 NAV_VTOL_LAND 航点开始降落时,VTOL 降落进场将在飞机所处的任何高度进行。因此,您通常希望前一个航点距离地面的高度为 20 米左右。
如果 Q_OPTIONS 如果设置为 "使用固定翼进近"(第 4 位),则不会过渡到 VTOL 飞行并进行 VTOL 降落,而是保持平面模式,并继续前往降落位置,爬升或下降到在 NAV_VTOL_LAND 航点中设置的高度。当到达 q_fw_lnd_apr_rad 在到达着陆点后,它将执行 LOITER_TO_ALT,以完成爬升或下降到航点中设定的高度,并使用 q_fw_lnd_apr_rad 然后转入 VTOL 模式,前往着陆地点并着陆。
请注意,如果 q_fw_lnd_apr_rad = 0 时,将使用航点空闲半径。请确保设置 VTOL_LAND 航点高度和 q_fw_lnd_apr_rad 距离,以避开障碍物。还需注意的是,如果在 VTOL 模式下到达该航点,即使设置了该选项,也将按照正常的 VTOL_LAND 命令进行。
备注
请确保 NAV_VTOL_LAND 的放置位置有足够的距离达到 q_fw_lnd_apr_rad加上至少 90 度的转弯,再加上解除过渡到 VTOL 模式所需的距离。
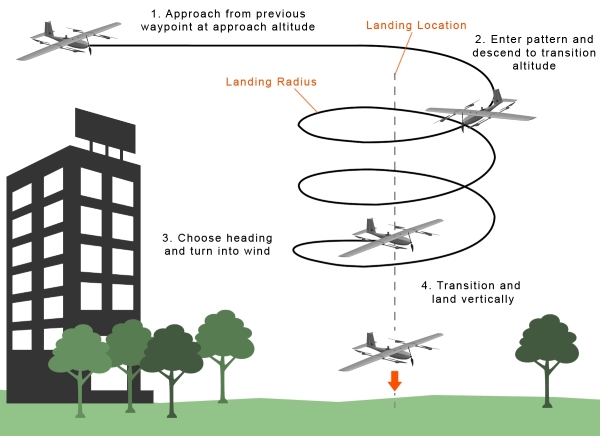
(图由 SRP AERO 提供 https://srp.aero/)
4.1 及更高版本¶
默认情况下,NAV_VTOL_LAND 将在当前高度保持固定模式,直到接近着陆点,执行 "空中制动 "机动以降低速度,然后过渡到 VTOL 模式,精确导航到着陆点,并像 QLAND 模式一样下降到着陆点。这样就可以将 NAV_VTOL_LAND 点设置在离最后一个航点任意远的地方,而不必担心在 VTOL 模式下时间过长。
如果 Q_OPTIONS 如果将第 16 位设置为禁用固定翼进场阶段,则在执行命令时将立即过渡到 VTOL 模式,并以 VTOL 模式导航到着陆点。这就要求在执行该命令前仔细设置最后一个航点,以避免在 VTOL 模式下到达着陆点的路径过长。
如果 Q_OPTIONS 如果第 4 位被置位,则即使第 16 位被置位,飞行器也将在切换到 VTOL 模式之前执行上一节所述的固定翼进场和高度徘徊。如果第 16 位也被设置,那么当飞行器切换到 VTOL 模式时,它将尝试在最后一个航段进行空中制动和 QLAND。
返回发射¶
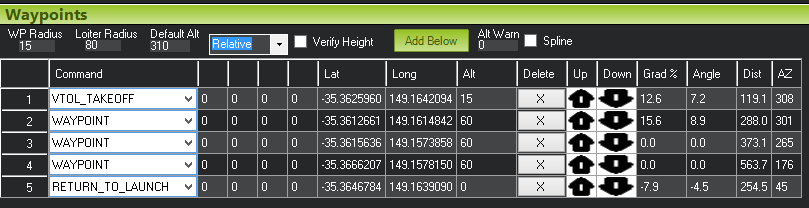
使用 NAV_VTOL_LAND 命令的另一种方法是使用 RETURN_TO_LAUNCH 命令,并设置 Q_RTL_MODE 参数为 1。
将 RETURN_TO_LAUNCH 与 Q_RTL_MODE 设定为飞机将自动使用固定翼飞行,直到进入 RTL_RADIUS 的返回点。这样就能更容易地计划从飞行区域内的任何地方进行 VTOL 降落的任务。
VTOL 和固定翼混合飞行¶
要在一次任务中混合使用固定翼和 VTOL 飞行,可以在任务中使用 DO_VTOL_TRANSITION 命令。DO_VTOL_TRANSITION 命令只有一个参数。如果参数设置为 3,飞机将切换到 VTOL 模式。如果参数设置为 4,则飞机将变为固定翼模式。
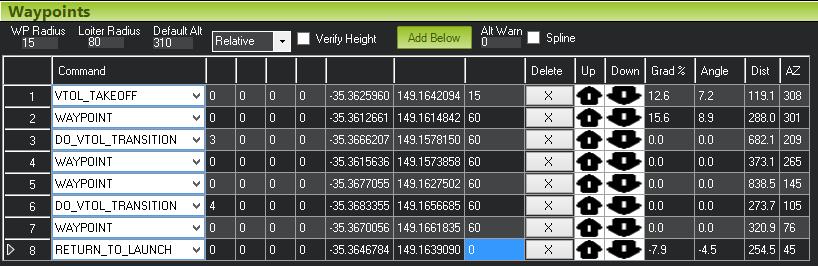
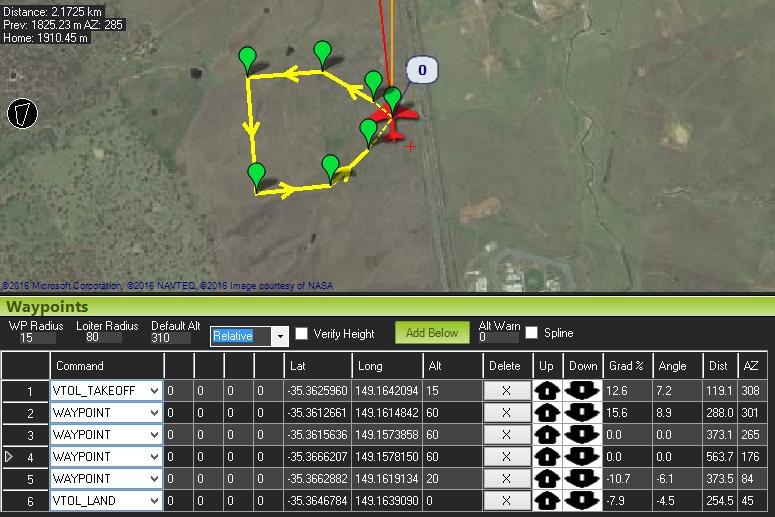
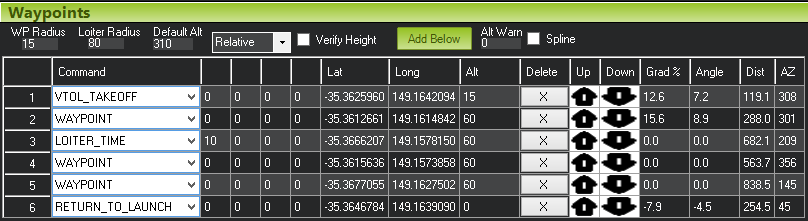
在上述示例中,飞机将进行 VTOL 起飞,然后作为固定翼飞机飞往航点 1。然后切换到 VTOL 模式,以 VTOL 飞机的身份飞过航点 4 和 5,然后切换回固定翼飞行模式到达航点 7,最后以 VTOL 飞机的身份飞回家并着陆(假设 Q_RTL_MODE 设置为 1)。
在任务中徘徊¶
通过设置 Q_GUIDED_MODE 参数为 1 时,您的垂直起降机将以 引导模式 以及在自动任务中作为 VTOL 飞机执行任务。例如,以下任务:
飞机将在 3 号航点悬停 10 秒钟。在飞行任务的其余部分,飞机将作为固定翼飞机飞行。这对于在任务中拍摄多个地点的精彩照片非常有用,同时还能以高效的固定翼飞机执行大部分飞行任务。
引导模式¶
除自动模式外,您还可以在以下模式中使用 QuadPlane 引导模式.要在引导模式下使用 VTOL 支持,需要设置 Q_GUIDED_MODE 参数设置为 1。设置后,"引导 "模式的行为将发生变化,在目的地的位置保持将以 VTOL 方式悬停,而不是固定翼绕圈的方式进行。
将以固定翼飞机的方式接近引导航点。过渡到 VTOL 飞行将从 WP_LOITER_RAD 半径,单位为米。应根据飞机的具体情况进行适当设置。80 米的值适用于各种 QuadPlanes。
在 "引导 "模式下悬停在目的地时,如果给定了新的 "引导 "目的地,飞机将转回固定翼飞行,飞到新的地点,然后再次以 VTOL 模式悬停。