ArduPilot 的历史¶
2007 年 5 月 - 克里斯-安德森开始 DIYDrones.com 在建造他的 乐高头脑风暴基地无人机.
2008 年 9 月 - Jordi 建造的传统旋翼飞行器无人机能够 自动飞行 和 在首届 Sparkfun AVC 比赛中获胜.

约尔迪的传统旋翼飞行器¶
2009 年--克里斯-安德森和约尔迪-穆诺兹创立 3D 机器人公司
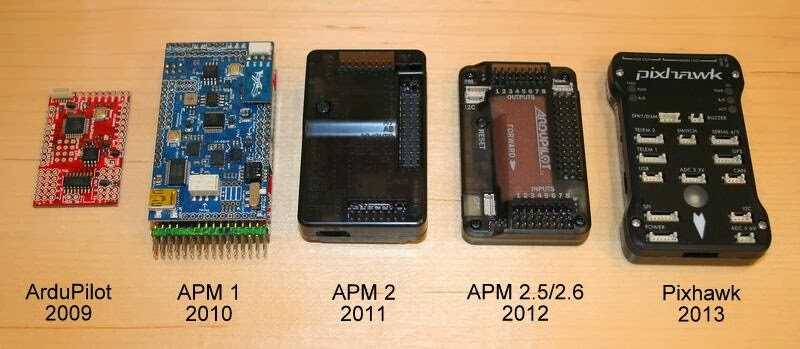
2009 年 5 月 第一块 ArduPilot 电路板 (使用 热电堆由 Jordi/3DRobotics 发布)。
2009 年 11 月 ArduPilot 代码库 由 Jordi 创建
2009 年 11 月--Jordi、Doug Weibel 和 Jose Julio 使用 William Premerlani 提供的 DCM 编写了 ArduIMU 的第一个版本
2009 年 11 月 - 2010 年 2 月 - ArduPilot 由 Jason 从头开始重写(v2.5),包括中断驱动 RC 输入、RC 节流阀故障安全、RTL、Loiter、Circle、Crosstrack 校正、体面稳定、Fly-By-Wire、系统事件、4 通道 RC 输出和双向遥测。(职位)
2009 年 12 月 首次基于 IMU 的自主飞机飞行任务 由 Doug 使用修改后的 ArduPilot v2.4 飞行。
2010 - 3d Robotics 发布 APM1
2010 年初 - Doug 和 Jason 发布了 ArduPilot 2.6,改进了油门控制并支持 ArduIMU。
2010 年夏季 - APM 代码开发:
Jason - 任务脚本、飞行模式、导航
何塞 - 代码库、DCM 和硬件传感器支持
道格 - 高级飞行控制、记录、DCM
MikeS - 参数、CLI、快速串行接口、高级硬件优化
2010 年 5 月 ArduPilot 与 AeroQuad(包括 Jani Hirvinen)合并,并开始开发 CopterNG
2010 年 6 月--APM 1 首次在西南部地区执行自主和脚本任务 (邮寄)
2010 年 6 月--APM 1 拔得头筹 自主飞机飞行
2010 年 7 月--Jason 为 Xplane 开发了基于 Perl 的 "硬件在环"(Hardware-in-the-loop),用于在其中测试新的 APM 任务脚本命令(后来集成到 Mavlink 中)(职位)
2010 年 8 月 - Jani/jDrones 推出首批 DIY 四边形框架 被采纳为最初的标准
2010 年 10 月 - ArduPilot 团队放弃了 CopterNG(AeroQuad/ArduCopter 合并代码)项目,并在鼓励下将其移交给了 ArduPirates 团队进行进一步开发。杰森使用基于 Plane 的替代控制逻辑重启 Copter,使 Copter 成为自主飞行器。增加了 Loiter、Circle、RTL、任务脚本、故障安全、起飞、着陆等功能。
2010 年 8 月 - Mission Planner地面站 由迈克尔-奥本发行
2010 年 8 月 - 支持 TradHeli 由 Randy 添加
2010 年 12 月 - ArduPilot 代码首次成功分叉为 MegaPirates 小组扩展了原始 CopterNG 代码
2011 年 4 月--杰森首次执行完全自主的 "旋翼飞行器 "飞行任务。 Sparkfun AVC
2011 年 4 月 - 激光导航公司制造出第一件能够运行 ArduCopter 软件的 32 位硬件
2011 - 3D Robotics 发布 APM2
2011 年 11 月 自动测试仪 由 Tridge 创建
2012 - 3D Robotics 发布 APM2.5/2.6 版
2012 年 2 月--杰森请兰迪接手并担任 Copter 的首席开发员,道格去攻读博士学位,特里奇接手 Plane。
2012年2月--- 马可-罗布斯蒂尼 担任首席旋翼飞行器测试员
2012 年 7 月 发布 PX4 由 ETH (Lorenz Meier,MikeS) / 3D 机器人技术
2012 年 8 月 - Pat Hickey 的硬件抽象层 (AP_HAL) 简化了对其他板卡的支持
2012 年 10 月 - 第一期 TradHeli 自主飞行任务 作者:罗布-勒菲弗
2012 年 10 月 - Tridge 和 CanberraUAV 与 APM2 & Pandaboard 一起赢得内陆挑战赛
2012 年 11 月--首个 APM2.5 克隆版出现
2012 年 12 月 - 乔纳森-查林格(Jonathan Challinger)成功研制出三阶互补滤波器原型,兰迪和伦纳德(Randy and Leonard)利用该原型成功实现了 Copter 基于惯性的高度保持 (AC2.9).
2013 年 1 月 - ArduPilot 代码从 谷歌代码 至 github
2013 年 1 月/2 月:安卓全球控制系统出现 (亚瑟的 DroidPlanner, 凯文-赫斯特的 AndroPilot)
2013 年 4 月 飞机 L1 航点 由保罗-里斯博罗、布兰登-琼斯、特里奇领衔主演
2013 年 5 月 - 旋翼飞行器惯性导航支持航点导航,由 Leonard 和 Randy (AC3.0)
2013 年 7 月 - 特里奇公司的保罗-里斯博罗对飞机进行速度和高度综合控制
2013 年 9 月 - Flymaple 官方支持:Mike McCauley、Tridge
2013 年 11 月 - 发布 Pixhawk 由 ETH (Lorenz Meier,MikeS)/ 3D 机器人技术
2013 年 12 月 BeaglePilot 项目 由 Víctor Mayoral Vilches 和 Siddharth Bharat Purohit 创建,旨在将 APM 代码库移植到 Linux。该项目由 Andrew Tridgell、Philip Rowse 等人发起,由 3DR、Google(通过 Google Summer of Code)和 BeagleBoard 资助。
2014 年 1 月 - Tridge 的 Paul Riseborough 添加了扩展卡尔曼滤波器,以获得更可靠的姿态和位置信息
2014 年 3 月 - VRBrain 由 Emile Castelnuovo 和 Tridge 添加的棋盘支持
2014 年 3 月 - Emlid 介绍 Navio这是首个可在 Raspberry Pi 上直接运行 ArduPilot 的 Raspberry Pi 自动驾驶盾牌。
2014 年 8 月 - 首次使用 Linux 进行飞机飞行 板(Pixhawk 火斗篷)
2014年9月 Tridge & 堪培拉无人机赢得内陆挑战赛 用基于 ArduPilot 的无人驾驶飞机("AirPilot")进行飞行。特里奇的汇报 ).
2014年9月 首次在 Linux 上进行旋翼飞行器飞行 +板(Pixhawk 火斗篷)
2014 年 10 月 DroneCode 基金会 形成 (公告)
2014 年 10 月--首次报告飞机成功用于搜索和救援,包括在佛罗里达州找到一架失踪的轻型飞机。
2015 年 2 月 - 埃尔机器人 推出基于 APM 的 Linux 无人机 DIY 套件。
2015 年 5 月--首次记录了仅使用单个地面站的多车飞行 (前三名, 然后五十!).
2015 年 6 月 - 3DR 独奏飞船首款内置配套计算机的 RTF 旋翼飞行器
2015 年 6 月 - 派诺特 Bebop 端口首次成功飞行
2015 年 8 月 - 迈克尔-克莱门特 & 迈克尔-戴飞 多载具环境中的 50 架双翼飞机
2015年9月 - 第一起涉及 ArduPilot 飞行器(Solo)驾驶员行为不端的重大新闻事件
2016 年 3 月 - 3DR 停止直接资助 ArduPilot 社区,因为它 裁员.
2016 年 3 月 - 成立 ardupilot.org 非营利组织 和新网站。
2016 年 5 月 - Flirtey 送货无人机(使用 ArduPilot)进入史密森航空航天博物馆.
2016 年 9 月 - 移除 Flymaple 板支持(未积极测试或使用,也缺少维护者,参见 PR #4191)。
2016 年 9 月 - 由于 DroneCode 白金官方成员以高于白银官方成员的票数将包括 ArduPilot 在内的 GPLv3 项目从 DroneCode 中移除,与 3DR、Chris Anderson 和 PX4 团队负责人的关系恶化。
2016 年 9 月 - ArduPilot 启动 ArduPilot 合作伙伴 组。
2016 年 9 月 - 堪培拉无人机在 2016 年 "医疗快车 "比赛中获得第一名 比赛(又名 "内陆挑战赛") (听取执行任务的情况汇报)
2016 年 10 月 - 发布 Copter-3.4,包含物体回避功能。
2017 年 2 月 - ArduSub 正式加入 ArduPilot 和 合并回主文件
2017 年 2 月 - 澳大利亚堪培拉 ArduPilot 开发者非会议 (特里奇, 保罗, 迈克尔-奥)
2017 年 5 月 - 谷歌 "代码之夏 "资助 4 名开发人员 夏季(见 SafeRTL)
2017 年 7 月 - 发布 Copter-3.5,包括 Visual Odometry 和 Pozyx 支持非 GPS 导航,AutoTune 获得位置保持、 仅支持
2017 年 8 月 - SkyRocket 宣布推出基于 ArduPilot 的 SkyViper GPS 流媒体无人机 (博客)
2017 年 8 月 - Rover-3.2.0 发布 "洋葱 "架构、新的分层速率和速度控制器、防滑转向载具支持、SmartRTL
2018 年 5 月 - 谷歌代码之夏为 5 名开发人员提供暑期资金。成功的项目包括 Balance Bot 支持。
2018 年 5 月 - Rover-3.3.0 发布,包括圆形和多边形围栏、简单物体避让、船只
2018 年 6 月 - Rover-3.4.0 发布,包括 "基于车道的速度控制"、适用于船只的 Loiter、全方位漫游器、基于视觉的 ROS 位置估计
2018 年 8 月 - Plane 3.9.0 发布,支持 ChibiOS,支持多种小型(飞行)控制器,更好地支持 VTOL
2018 年 10 月 - Copter-3.6.0 发布,支持 ChibiOS、支持许多小型(飞行)控制器、DShot ESCS、跟随模式
2019 年 2 月 - UGV无人车-3.5.0 发布,包括帆船支持、跟随和简单模式
2019 年 8 月 - ArduPilot 飞行器飞越 北极, 视频
2019 年 9 月 - Plane 4.0.0 发布,其中包含许多 DroneCAN 增强功能和 AP_Periph 固件系统
2019 年 11 月 - UGV无人车 4.0.0 版发布,改进了船只和帆船功能,支持 OSD,新增物体规避模式
2019 年 12 月 - Copter 4.0.0,支持 RCx_OPTION、LUA 脚本支持、新模式、多达 10 个电池监测器
备注
上述清单包括项目的许多重要里程碑。请参见 Copter.cpp 或 GitHub 贡献者图谱 更完整的项目贡献者名单。