存档主题:Erle-Brain Linux (飞行)控制器¶
本页介绍 Erle-Brain Linux (飞行)控制器 - ArduPilot (飞行)控制器和 配套电脑 在一个包装中。
目前,这款基于 Linux 的(飞行)控制器有两个版本,还有一个屏蔽罩:
Erle-Brain 2:用于无人机和机器人的新一代人工机器人大脑,使用 DroneCode 基础工具、ROS 和许多其他工具。
PXFmini:用于 Raspberry Pi 的开放式自动驾驶盾牌、 放在这里.
Erle-Brain 1(*已停产)*:第一个原生运行 ArduPilot 和 ROS 的开源 Linux (飞行)控制器。
基于 Erle-Brain 的无人机的组装方法见 官方文件.基于 Erle-Brain 的无人机还可以从 Erle Robotics 的官方商店购买,商店有以下两种型号 即用型 和 DIY 套件 形式
Erle-Brain 2¶
Erle-Brain 2 是第二代基于 Linux 的人工机器人大脑,用于制造机器人和无人机,正式支持机器人操作系统(ROS)并可访问应用程序商店。
它由一台嵌入式 Linux 计算机(Raspberry Pi 2)和一块包含多个传感器、IO 和电力电子设备的子板组成。它是一个 Linux 嵌入式设备,可运行 ArduPilot 以及用于机器人应用程序开发的许多其他框架和服务。
一些 Erle-Brain 2 功能包括
Linux 文件系统 (Debian 和 Ubuntu Snappy Core)
支持 WiFi
ROS 聚焦(靛蓝色可选)
ROS 软件包 用于传感器和外围设备
Snappy Ubuntu 应用程序商店支持
MAVProxy 可自动将 MAVLink 数据包桥接到您的 WiFi 网络。
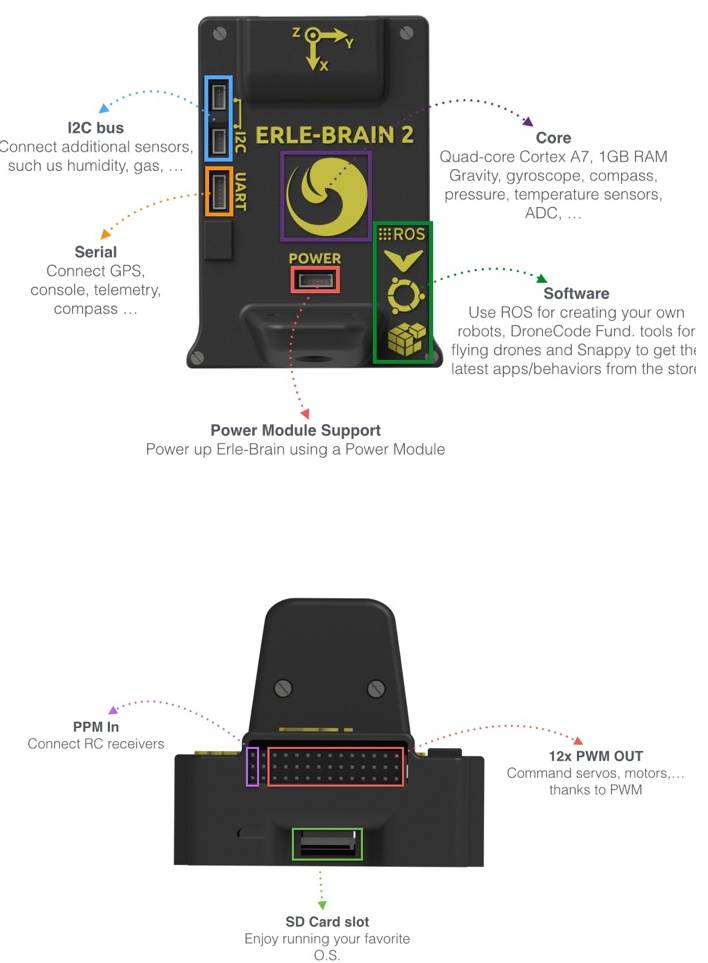
传感器:重力传感器、陀螺仪、数字罗盘、压力传感器和温度传感器,用于电池感应的 ADC。
可选配 WiFi 和蓝牙。
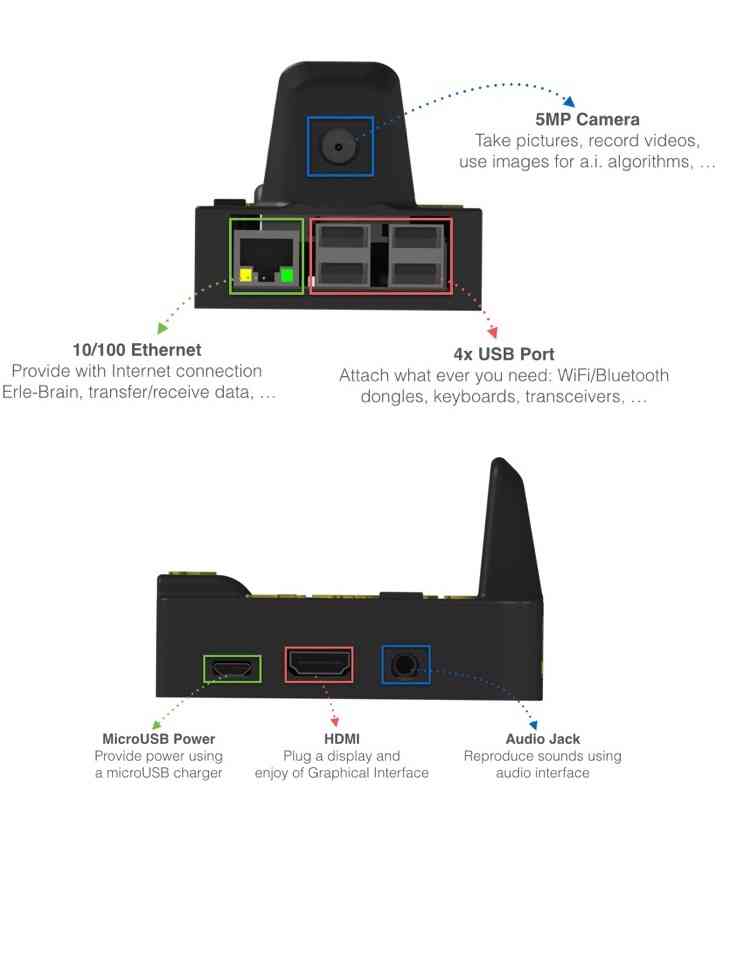
可选摄像头:MP 固定焦距镜头,2592 x 1944 像素静态图像,支持 1080p30、720p60 和 640x480p60/90 视频录制。
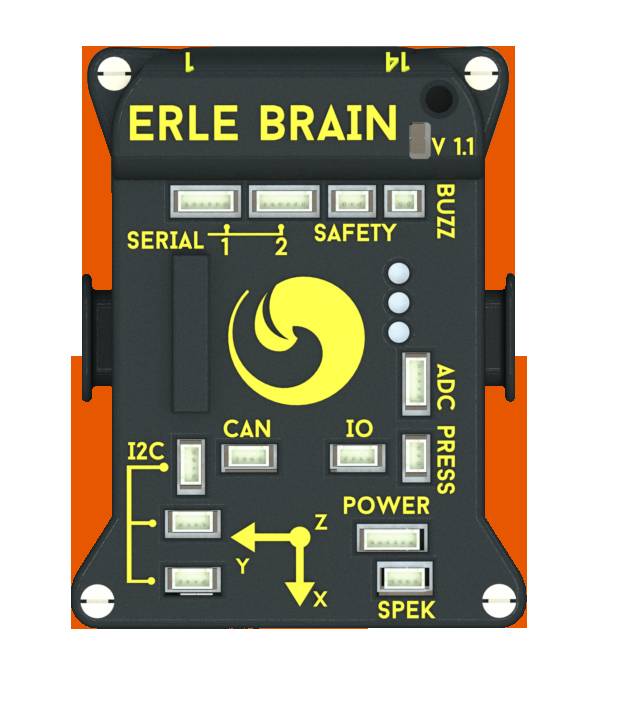
以下图片显示了 Erle-Brain 版本 2 可用的主要端口/功能。
下一张图片显示了 Erle-Brain 2 可以处理的软件特性:
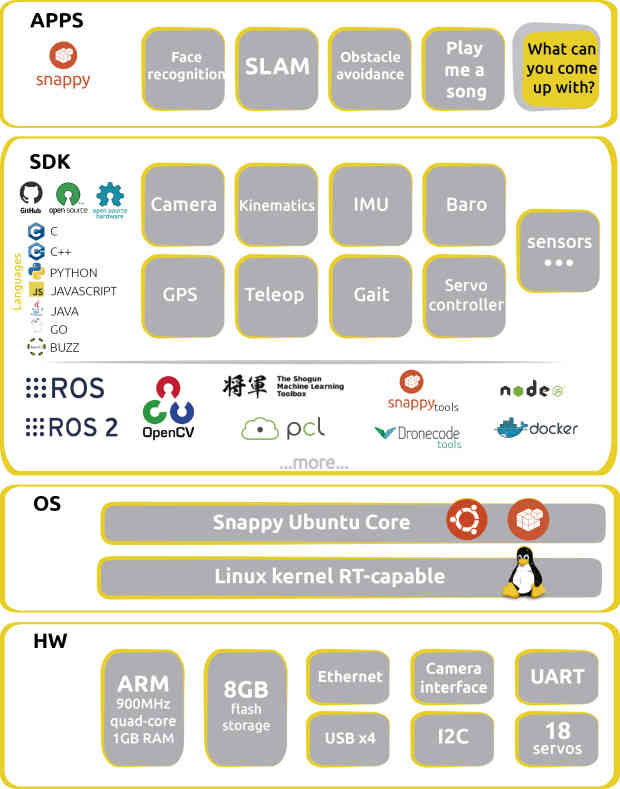
Erle-Brain v2 开发堆栈¶
快速启动¶
最简单的入门方法是通过 SSH 登录 Erle-Brain 2 并进行操作:
如果通过 WiFi 连接:¶
#password is holaerle.$ ssh [email protected]
如果通过以太网连接¶
#password is holaerle.$ ssh [email protected] #使用 ifconfig 和 nmap -sn 命令检查网络 $ ssh [email protected].*.* #密码是 holaerle。
获取更多信息 我们的文档
Erle-Brain 可以从 Erle Robotics 商店.
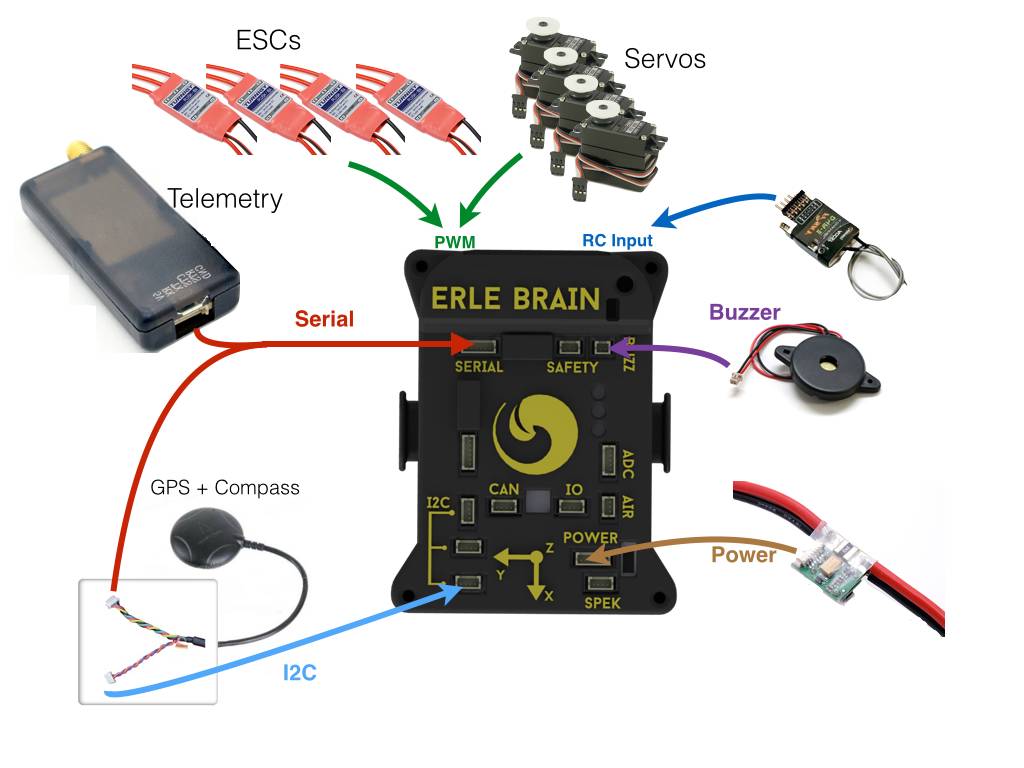
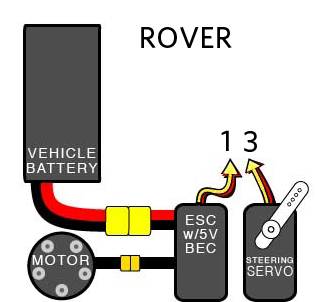
硬件设置¶
无人机飞行的典型硬件设置是
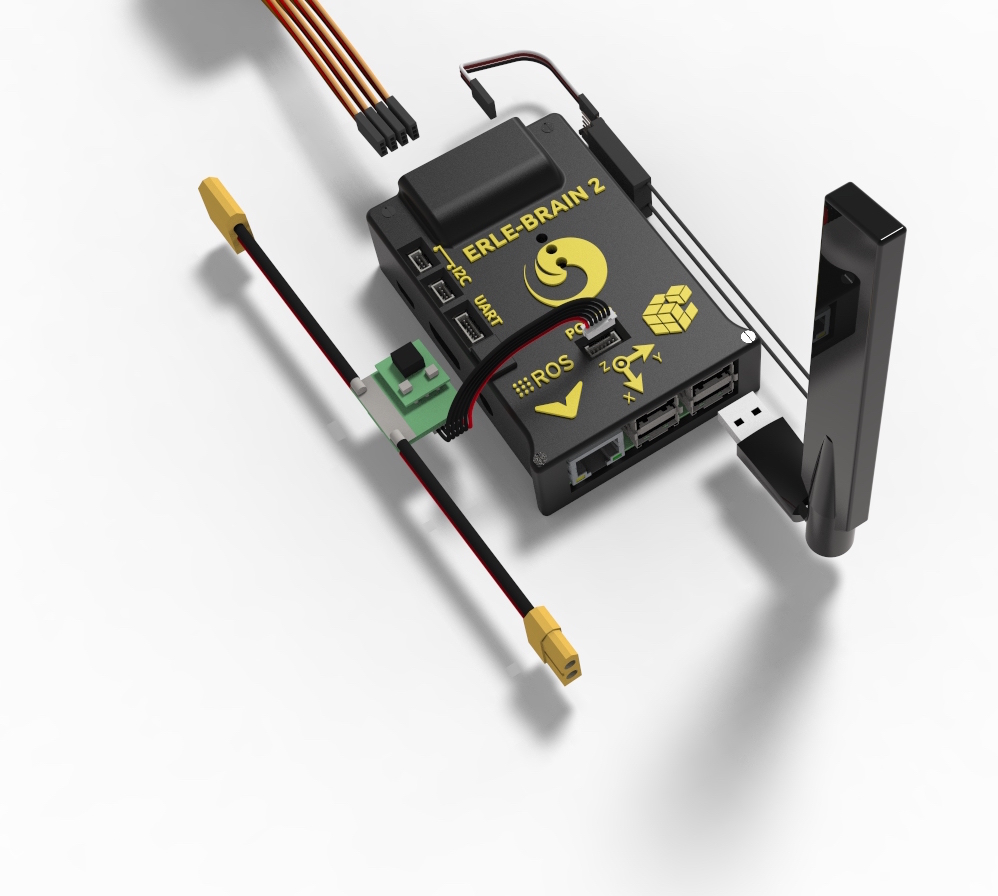
如果您想了解有关硬件连接的更多信息,请访问我们的 文档
在 Erle-Brain 2 上构建 ArduPilot¶
在 bash 命令提示符下运行以下指令,在 Erle-Brain 2 上构建 ArduPilot:
$ git clone --recurse-submodules https://github.com/erlerobot/ardupilot $ cd ardupilot
$ cd ArduCopter
$ make erlebrain2 -j4
照相机¶
相机图像直接通过 rastpicam_节点 它就会自动启动。为了能在 Erle-Brain 2.0 中看到图像,您需要在 Erle-Brain 2:
$ rosservice 调用 /camera/start_capture
在您的台式电脑上(或任何您希望将图像可视化的地方),在适当配置了 ROS_MASTER_URI 环境变量:
$ rosrun image_view image_view image:=/camera/image _image_transport:=compressed
Erle-Brain 可以从 Erle Robotics 商店.
Erle-Brain 1 (已停产)¶
Erle-Brain 它结合了嵌入式 Linux 计算机(BeagleBone Black)和 PixHawk Fire 披风(包含多个传感器、IO 和电力电子设备的子板)。它是一款开放硬件 Linux 嵌入式设备,可运行 ArduPilot 以及其他许多用于机器人应用程序开发的框架和服务。
一些 Erle-Brain 功能包括
Linux 文件系统 (Debian 和 Ubuntu Snappy Core)
支持 WiFi
重点关注 ROS(可提供 Hydromedusa 和 Indigo)
ROS 软件包 用于传感器和外围设备
Snappy Ubuntu 应用程序商店支持
MAVProxy 可自动将 MAVLink 数据包桥接到您的 WiFi 网络。
3 个 IMU(LSM9D、MPU9250、MPU6000)
Erle-Brain 可以从 Erle Robotics 商店.
快速启动¶
最简单的入门方法是通过 SSH 登录 Erle-Brain 并使用它:
如果通过 WiFi 连接:¶
$ ssh 11.0.0.1
如果通过 USB 连接:¶
$ ssh 192.168.7.2
硬件设置¶
一般设置¶
RC 输出和输入¶
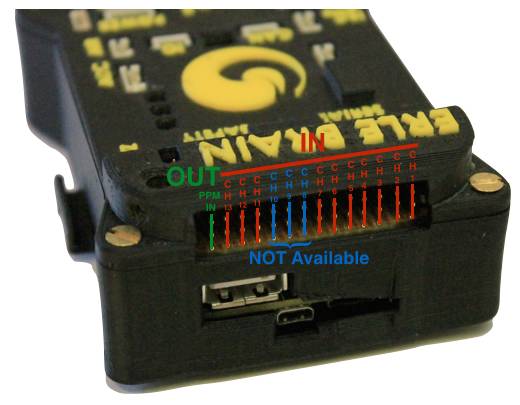
请注意,GND 位于针座的下端:
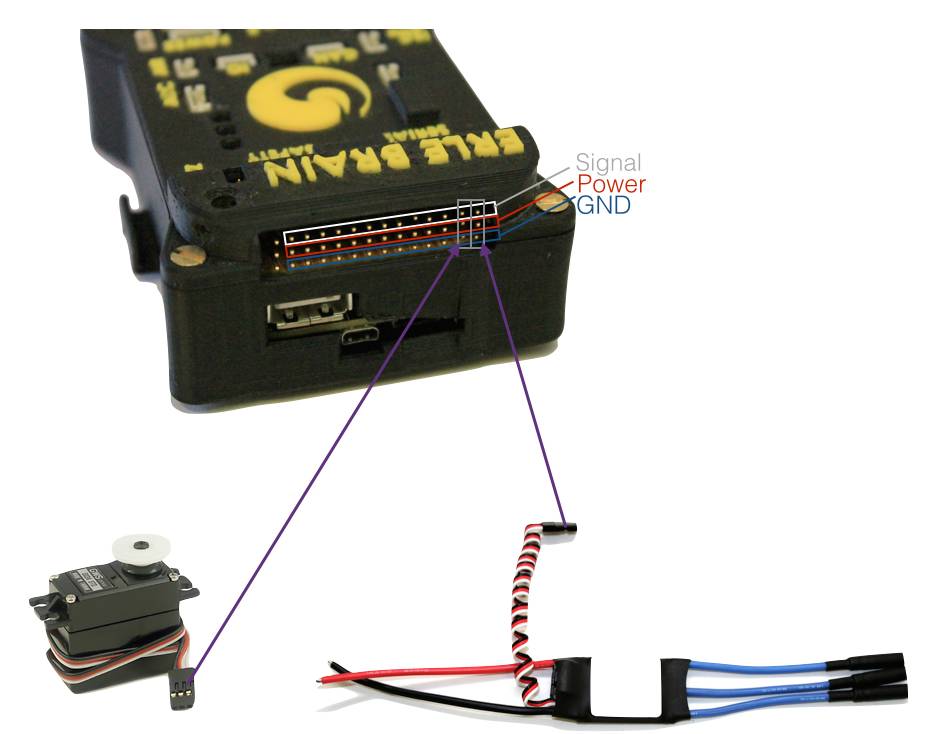
连接 D4R-II 接收器¶
许多人可能会对使用这种流行的接收器感兴趣,因此下面的图片展示了如何使用:
在 Erle-Brain 上构建 ArduPilot¶
在 bash 命令提示符下运行以下指令,在 Erle-Brain 上构建 ArduPilot:
$ sudo apt-get install gawk gcc-arm-linux-gnueabihf g++-arm-linux-gnueabihf
$ git clone --recurse-submodules https://github.com/erlerobot/ardupilot $ cd ardupilot
$ cd ArduCopter
$ make configure
$ make pxf
快捷的 Ubuntu Core 商店¶
Erle-Brain 完全支持 迅捷的 Ubuntu 核心.只需从 可用图像 (用于 microSD 卡),并开始开发 圈.
备注
Snappy Ubuntu Core 是 Ubuntu 的全新版本,具有事务性更新功能--它是一个最小化的服务器镜像,拥有与现在的 Ubuntu 相同的库,但应用程序是通过一种更简单的机制提供的。这种快速方法更快、更可靠,而且能为应用程序和用户提供更强大的安全保障,这就是我们称其为 "快速 "应用程序的原因。
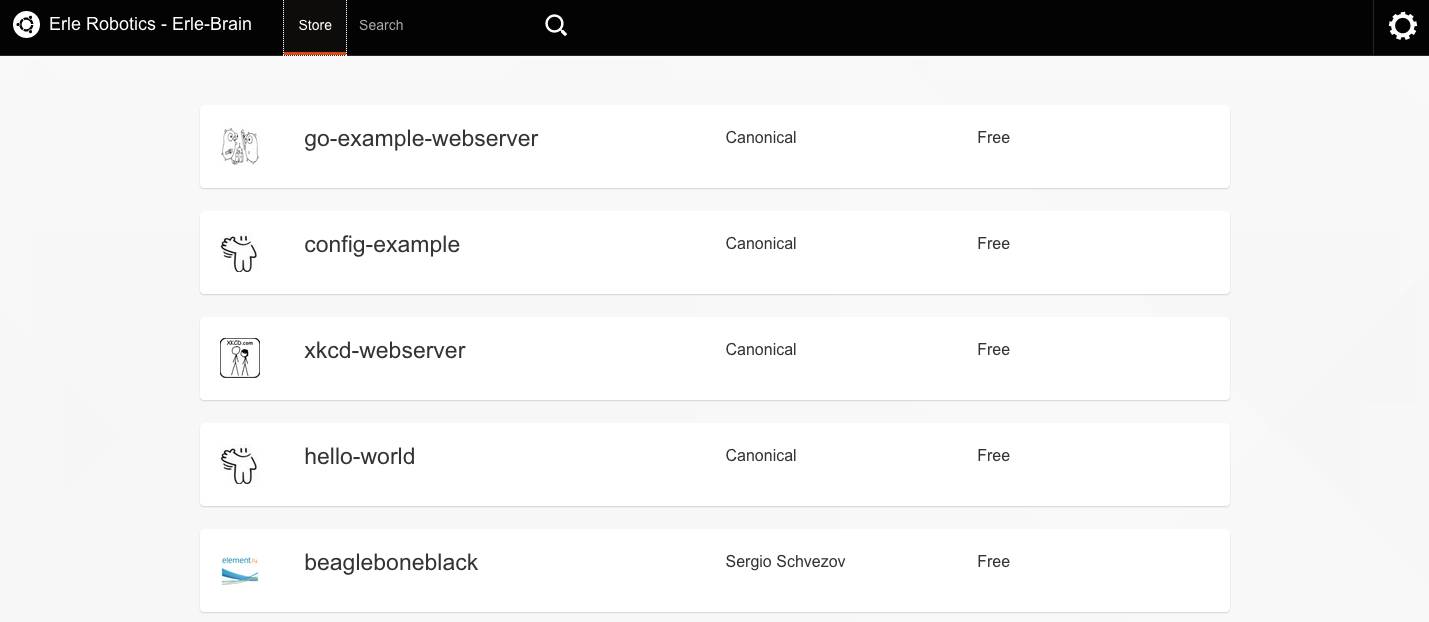
简洁的 "hello world "示例¶
下面的 bash 命令展示了如何安装和运行一个基本的 "Hello World "应用程序,使用 抢购:
$ snappy-go install hello-world
$ echo.hello-world.canonical Hello World!
可以找到有关 Snappy Ubuntu Core 的其他信息 这里.
无人机套件¶
3DR 的 Python DroneKit 可在 Erle-Brain 中完美运行。该工具包和应用程序接口的完整文档可在 python.dronekit.io.
以下命令概述了如何在 Erle-Brain 上安装该工具包及其依赖项:
$ sudo apt-get install pip python-numpy python-opencv python-serial python-pyparsing python-wxgtk2.8
$ sudo pip install droneapi
DroneKit "hello world" 示例¶
# 获取代码 $ git clone https://github.com/ArduPilot/droneapi-python.git $ cd droneapi-python/example # 启动 MAVProxy(如果不存在,请安装) $ mavproxy.py --master=udp:192.168.7.2:6000 MANUAL> module load droneapi.module.api DroneAPI loaded MANUAL>;
现在运行示例:
手册>; 应用程序接口 启动 小型演示.py
模式: 载具模式:手册
地点: 地点:纬度=21.2938874,长=-157.8501416,选一=0.189999997616,is_relative=无
态度: 态度:-0.286077767611,-3.01412272453,0.261489063501
全球定位系统: GPSInfo:定格=1,卫星数=0
参数: 75.0
等待 对于 下载
要求 10 航点 t=星期一 Mar 31 09:41:39 2014 现在=星期一 Mar 31 09:41:39 2014
首页 WP: 任务项目 {目标系统 : 255, 目标组件 : 0, 序列 : 0, 画框 : 0, 指挥部 : 16, 当前 : 1, 自动继续 : 1, 参数1 : 0.0, 参数2 : 0.0, 参数3 : 0.0, 参数4 : 0.0, x : 21.2921352386, y : -157.848922729, z : 89.1800003052}
APIThread-0 离去...
APM: 非-导航 指挥部 身份证 最新的 至 #255 idx=1
航点 1
自动>;
更多文件¶
有关厄勒-脑的更多信息,请参阅 其正式文件 或从 Erle 机器人论坛.