电机和伺服配置¶
本页描述了为支持所使用的转向和油门方法而应设置的几个参数。本页面与 电机和伺服连接 页面,其中介绍了(飞行)控制器、电机和伺服系统之间的物理连接。
转向和油门分离¶
对于单独的转向和油门载具,应设置这些参数值(默认情况下应已设置):
servo1_function = 26(地面转向)
servo3_function = 70(节流阀/电门)
如果使用Mission Planner地面站,"初始设置">> "必选硬件">> "伺服输出 "页面是一种方便的方法。

防滑转向¶
对于 "侧滑转向 "载具(如 R2D2),需要设置这些参数值:
servo1_function = 73(左节流阀)
servo3_function = 74(节流阀右侧)

全能载具¶
对于全方位载具(可以左右移动而不改变航向),需要设置这些参数值:
框架类型 = 1(Omni3)、2(OmniX)或 3(OmniPlus)
servo1_function = 33(电机1)
servo2_function = 34(电机2)
servo3_function = 35(电机3)
servo4_function = 36(电机4)
电机驱动器类型¶
至少支持三种不同的电机驱动器(又称电调)类型,这使得 ArduPilot 可以与大多数电机驱动器配合使用。电机驱动器 MOT_PWM_TYPE 参数,以确保(飞行)控制器电路板的输出与电机驱动器所需的输入相匹配。
电调配置¶
某些电调支持三种 "运行模式":
带制动器的前进
带制动器的前进和后退
正转和反转
为了让UGV无人车能够完全直接地控制油门,最好将 "运行模式 "设置为第 3 个选项 "前进和后退"。通常可以使用与电调兼容的电调编程卡来更改电调的配置。
测试电机方向¶
Mission Planner地面站(或许还有其他全球控制系统)可用于测试发动机的方向:
插上载具电池,将载具放在支架上,使车轮可以自由移动
使用 USB 或遥测无线电与Mission Planner地面站连接
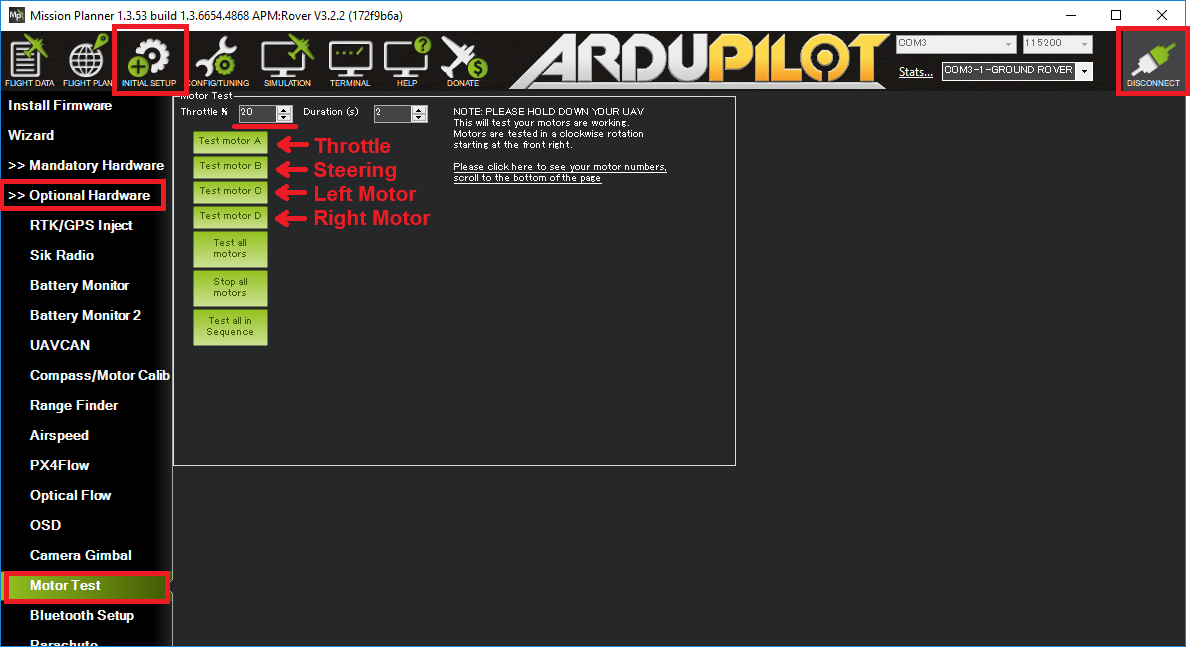
转到初始设置 >>可选硬件 >>电机测试页面
将 "节流阀/电门 %"调至 20
按下 "测试电机 "按钮,测试转向和电机。
对于转向和油门分离的漫游车,按下 "测试电机 A "按钮,车轮应向前转动;按下 "测试电机 B "按钮,转向应向右转动。
对于带防滑转向装置的漫游车,"测试电机 C "应使左轮向前转动。"测试电机 D "应使右轮向前转动。
如果电机或转向器的移动方向不正确,请更换相应的电机或转向器。
SERVOx_REVERSED值,然后再试一次。如果出现 "命令被拒绝 "信息,或者发动机或转向器对测试没有反应,原因可能写在Mission Planner地面站的 "飞行数据 "选项卡中(见窗口左下方)。常见原因包括未执行无线电校准或
SERVOx_FUNCTION参数设置不正确。
最小节流阀¶
许多电机和电调都有一个死区。这是零油门值与电机开始运动的油门值之间的区域。这可以通过在固件中设置最小油门来补偿。
提示
在使用地面载具之前,先卸下车轮。如果船只上的螺旋桨不容易拆卸,则要注意!
要修复死区,请在Mission Planner地面站中打开电机测试窗口,如前所述 低于.找出电机开启的最小节流值,并设置参数 MOT_THR_MIN 到该值。现在,电机应在 1%油门时启动。
转向速度缩放¶
载具在不因横向加速度而倾覆的情况下可施加的转向量可通过改变 基数.速度低于此值时,转向角为全角。速度高于该值时,最大转向角将按以下比例减小 基数 / 地面速度。
在 Acro、Hold、Steering、Auto、RTL、Smart RTL 和 Follow 模式下,该缩放始终有效。在制导模式下,除了将直接转向和油门作为输入指令提供外,均使用该缩放。在 "手动 "模式下,该缩放比例的使用由"...... "的第一位启用。 MANUAL_OPTIONS.