无线电遥控校准¶
本文介绍如何使用Mission Planner地面站执行无线电遥控校准。
概述¶
遥控发射器允许飞行员设置飞行模式、控制飞行器的移动和方向,还能开启/关闭辅助功能(如起落架的升降等)。
RC 校准包括捕捉每个 RC 输入通道的最小值、最大值和 "微调 "值,以便 ArduPilot 能正确解释输入。
检查发射机设置¶
确保电池已断开(这一点很重要,因为在遥控校准过程中可能会意外启动载具)
确保遥控接收器与(飞行)控制器连接
打开遥控发射机,如果有 "微调片",确保其位于中间位置。
使用 USB 电缆将(飞行)控制器连接至电脑
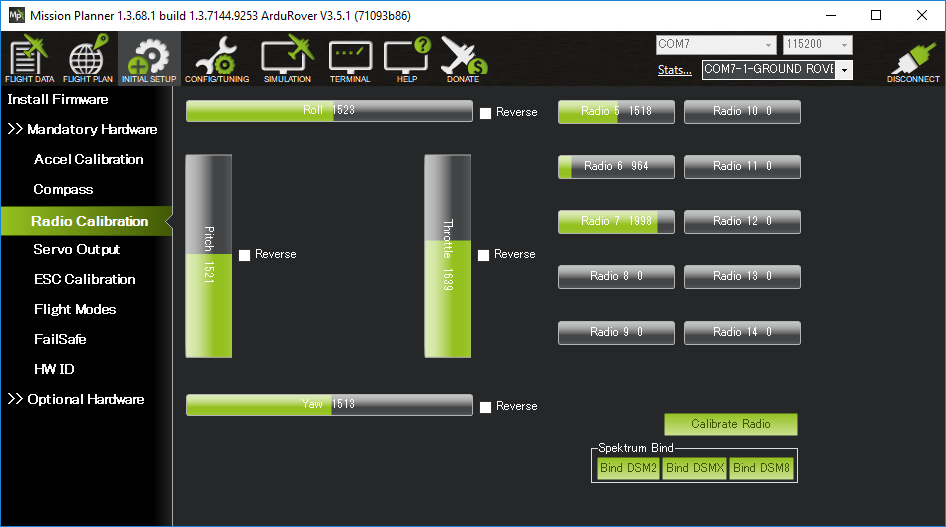
在Mission Planner地面站上按下 "连接 "按钮,打开Mission Planner地面站的 初始设置 | 强制硬件 | 无线电校准 筛查
应出现一些绿条,显示 ArduPilot 正在接收发射器/接收器的输入。如果没有绿条出现,请检查接收器的 LED 指示灯:
无指示灯可能表明与(飞行)控制器的连接有误。查找可能被颠倒插入的连接器
红色或闪烁的 LED 指示灯可能表示您的遥控发射机/接收机需要绑定。有关说明,请参阅遥控设备附带的手册。
通过移动摇杆、旋钮和开关并观察哪些绿条(如果有)移动,检查发射机中的通道映射(即检查发射机的摇杆、开关和旋钮控制哪些输入通道)。如果发射机是第一次与 ArduPilot 一起使用,则可能需要更改发射机的通道映射,通常可在发射机上使用其内置配置菜单进行更改。
确定发射机是模式 1 还是模式 2(见下文)。
滚动杆应控制通道 1
螺距杆应控制通道 2
油门杆应控制通道 3
偏航杆应控制通道 4
3 位或 6 位开关(控制飞行模式)应设置为控制通道 5(默认值,如使用 Copter)或通道 8(默认值,如使用 Rover 或 Plane)。可以通过设置 FLTMODE_CH 参数,或 MODE_CH 在罗孚
在 Copter 上,飞行稳定调整旋钮应控制通道 6
在 Copter 和 Rover 上,任何剩余的两个或三个位置开关都可以通过映射到通道 7 至 12 来设置为控制辅助功能
移动发射机的滚动杆、俯仰杆、油门杆和偏航杆,确保绿条朝正确方向移动:
对于翻滚、油门和偏航通道,绿条的移动方向应与发射器物理摇杆的移动方向一致。
对于间距,绿条应在 对面 发射器的物理棒方向。 这不是许多发射机的默认设置。
如果其中一个绿条的移动方向不正确,请在发射机中反转通道。如果无法在发射器中反转通道,则可以在 ArduPilot 中通过选中 "Reversed(反转)"复选框来反转通道(仅限 Plane 和 Rover)。如果复选框不可见,则可以通过直接更改
RCx_REVERSED参数(其中 "x "为 1 至 4 的输入通道)。同样,如果可能,一定要使用发射机的通道反转功能来正确设置条形图的移动方向,而不是使用RCx_REVERSED参数。
校准¶
打开Mission Planner地面站的 初始设置 | 强制硬件 | 无线电校准 筛查
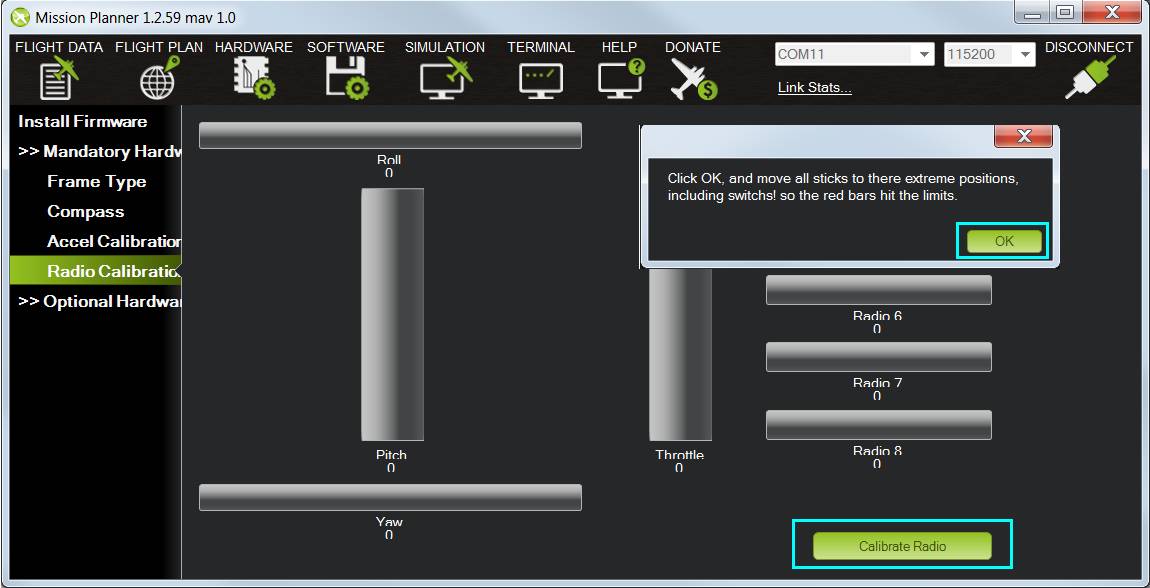
点击右下方绿色的 "校准无线电 "按钮
按 "OK",检查无线电遥控设备是否打开,电池是否连接,螺旋桨是否连接。
将发射机的控制杆、旋钮和开关移动到极限位置。校准条上会出现红线,显示目前看到的最小值和最大值
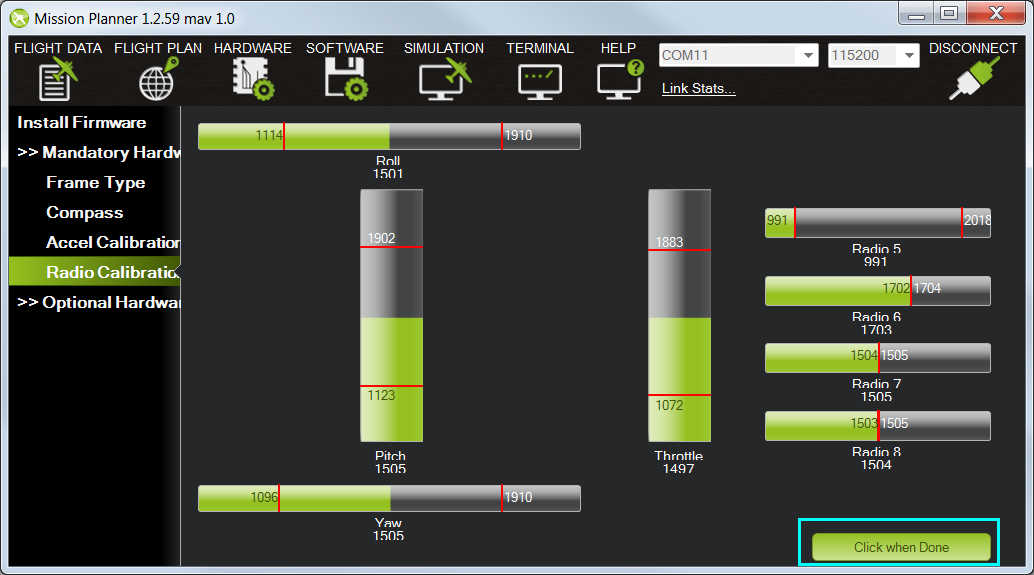
选择 完成后点击
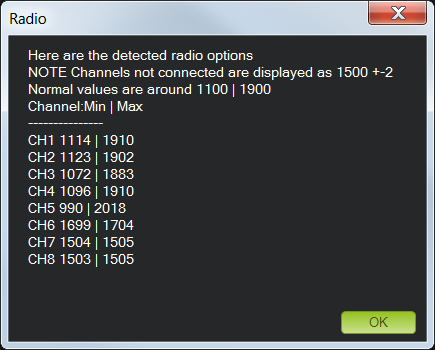
此时会出现一个窗口,提示 "确保所有摇杆居中,油门向下,然后单击确定继续"。 将油门移至中间 然后按 "OK"。
Mission Planner地面站将显示校准数据摘要。正常情况下,最小值约为 1100,最大值约为 1900。
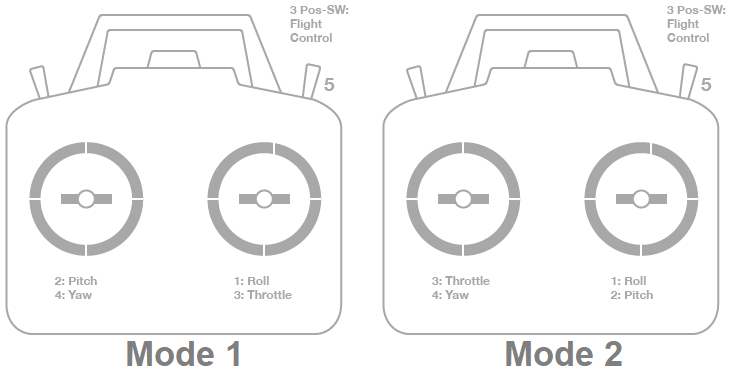
模式 1 和模式 2 发射机¶
发射机主要有两种配置:
模式 1左摇杆控制俯仰和偏航,右摇杆控制油门和翻滚。
方式 2左摇杆控制油门和偏航,右摇杆控制俯仰和翻滚。
UGV无人车用户可能更喜欢用同一摇杆控制油门和翻滚。
通道映射¶
Rover 默认通道映射为
频道 1:转向系统
第 3 频道:节流阀/电门
第 8 频道 (默认):飞行模式。模式选择可以使用 MODE_CH 规范
频道 7 至 12:(可选)辅助功能开关
以弹簧为中心的油门杆与自由移动式油门杆的比较¶
罗孚的节流阀通道被假定为正常居中,向前指挥前进运动,向后指挥后退运动。大多数载具和船只的遥控系统都采用这种弹簧居中的油门布置。然而,大多数飞机遥控系统的油门杆是自由移动的。使用这种布置会给保持杆精确居中以实现零运动带来挑战。
如果发射机能够编程由开关控制的多条油门曲线,那么很容易在一个开关位置(前进)设置一条油门曲线,从低杆时的 1500uS(50%,或通道的中间范围)开始,线性增加到最大输出(+100% 或 ~2000us),而在另一个位置(后退),同样从低杆时的中间范围开始,但脉冲宽度线性减小到通道的最小值(-100% 或 ~1000us),代表全后退油门。无论在哪种情况下,摇杆的零运动位置都是完全向下的,因此使用起来更加方便。
更多阅读¶
可通过以下方式更改滚转、前平移/俯仰、油门和偏航通道映射 RCMAP 输入通道映射
飞行模式开关设置可指定每个开关位置启用哪些载具模式,请参见 遥控发射机飞行模式配置 页码
路虎转向和倒车行为设置说明见 转向输入类型和倒车行为 页码