哈格雷夫技术公司 DroneCAN 电子调速器¶

Hargrave Technologies 是一家澳大利亚电力电子工程公司,专门从事符合 NDAA 标准的电子调速器 (ESC) 的专业设计和制造。
Hargrave 的电调专为受空间和重量限制的应用而设计,在保持最佳散热性能的同时优化了功率密度。 全部产品可在此处找到.
电调原生支持 DroneCAN,为控制、遥测、参数配置和固件更新提供了接口。以下指南介绍了如何进行设置,并概述了 DroneCAN 界面的主要功能。
Ardupilot 设置¶
请按照以下网址中的 DroneCAN 设置说明进行操作 DroneCAN 电子调速器 - 具体来说,就是(飞行)控制器在所需物理端口上激活 DroneCAN 驱动程序所需的参数。
入门¶
默认情况下,电调接受 CAN 总线通信输入。电调可通过 USB 或 CAN 总线进行配置。 用于设置、机载日志查看和固件更新的 USB 配置工具可在此处找到.
备注
要启用 CAN,需要 启用 CAN 总线 应根据需要进行设置。设置名称是 CAN 传输时的缩写。
运行 DroneCAN 时,建议根据系统要求设置 DroneCAN 节点 ID,注意不要重复。默认情况下,Hargrave ESC 会自动寻找节点 ID(飞行控制器将通过动态节点分配协商并提供一个节点 ID)。不过,这可能会导致 ID 随时间发生变化。以下电调设置将改变这种行为:
部队 DroneCAN 节点 身份证 (FORCE_NODEID):切换电调获取 ID 的方法。首选 DroneCAN 节点 身份证 (dronecan_nodeid):设置所需的节点 ID。启用强制节点 ID(Force Node ID)参数后,ESC 将使用此 ID。
应考虑的其他设置(可查阅更多文档 这里):
DroneCAN ESC 索引 (dronecan_index):配置电调将使用哪个飞行控制器的电机输出。通道以 0 为索引,因此飞行控制器上的电机 1 是ESC 索引= 0.要求 上膛 现状 DroneCAN (can_arm_chk_en):默认情况下,电调仅在(飞行)控制器广播其处于 "上膛 "状态时才会驱动电机。切换此设置可改变行为。CAN 终结者 启用 (CAN_TERM_EN):可以通过切换此设置启用板载软件可选 CAN 终端电阻。请按照下面的连接提示选择在哪个电调上启用该功能,因为每条总线上只能在一个设备上启用该功能。
连接电调¶
每个电调应采用菊花链配置连接,链的一端是飞行控制器,另一端是电调。
备注
确保飞行控制器已适当端接。例如,Pixhawk Cube 等型号默认安装了 CAN 终端电阻器。
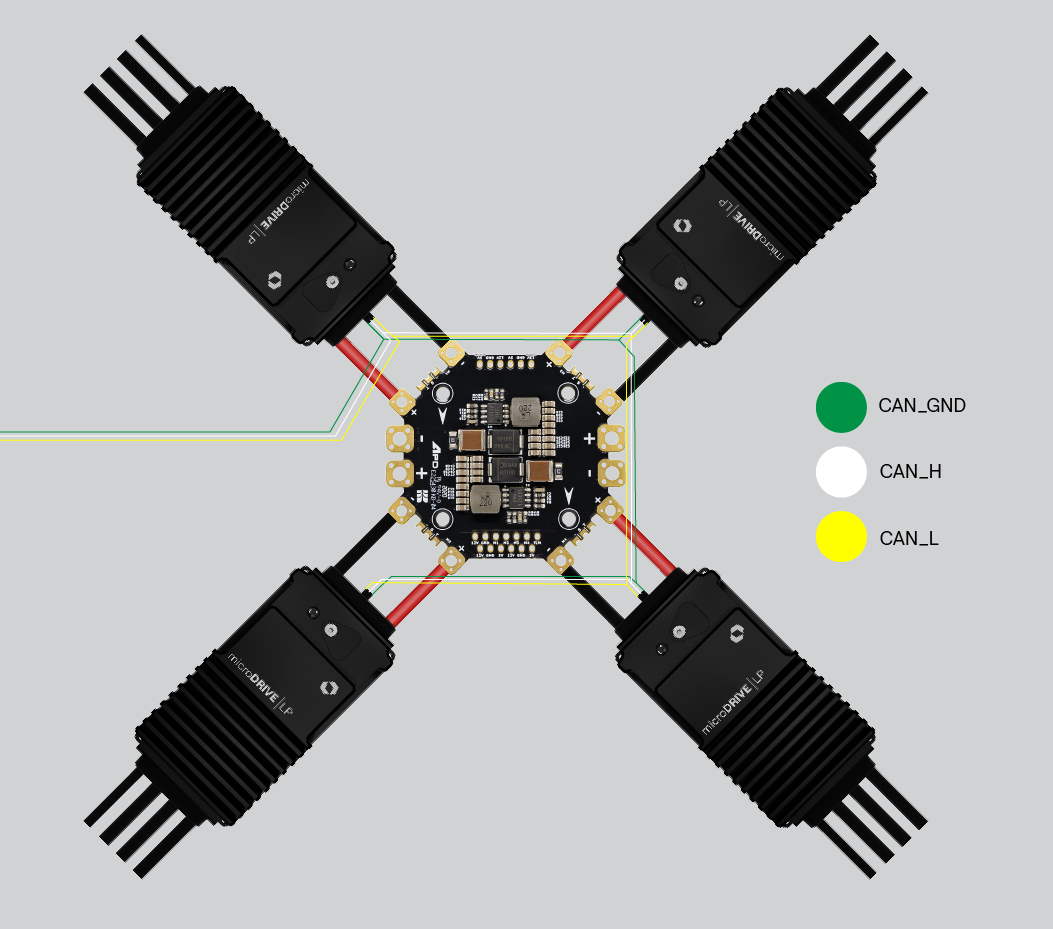
CAN H、CAN L 和 GND 应按相同顺序连接至飞行控制器端口。
备注
为便于集成,电调具有一个软件可选的 CAN 终端电阻,应启用菊花链上物理距离最远的电调(参照飞行控制器)。
下图显示了从飞行控制器通信到最终电调的 CAN 线路的布线(电调应激活终结器):
记录和报告¶
电调支持直接向(飞行)控制器发送遥测报告,以便查看和记录。Ardupilot 日志查看工具可用于查看这些数据。电调支持两种不同的遥测信息,可根据需要进行单独配置,传输以下数据:
ESC 初级状态¶
错误计数:当前电调上的有效错误。0 表示无错误。
电压:当前测量的总线电压。
电流: 当前测量的总线电流。
温度:当前测量的电桥温度。
转速:电机的转速,与
电机 杆 成对电调上的参数。请求功率: (飞行)控制器当前请求的功率百分比。
ESC 扩展状态¶
输入百分比:(飞行)控制器当前要求的占空比百分比。
输出百分比:当前输出至电机的占空比百分比。如果不等于输入百分比,则表明电调内部出现限制。
电机温度:所连接电机的温度(需要与电调连接的 NTC 或 PTC 传感器)。
电机角度:如果启用传感器输入,当前测量的电机角度。(需要外部电机位置传感)。
状态标志:电调的当前一般状态,非错误专用。
两种状态信息均单独传输,传输速率可根据需要单独调整。应尽量降低传输速率,以免 CAN 总线超载。
参数¶
电调支持通过 DroneCAN 进行参数/设置配置。电调将重新启动以应用参数更新。默认情况下,并非所有设置都会显示。要在 ESC 上显示所有可用参数,请启用 高级 设置 参数(ESC 需要重新启动才能应用并允许获取所有参数)。一旦设置,该设置将一直有效,直至再次更改。
备注
如果 CAN 已禁用,则需要访问 USB 才能将电调从串行信号模式配置回 CAN。
当电机运行时(或电调处于电机驱动状态),电调将拒绝获取或保存参数的尝试。若要执行进一步更新,可解除电机(假定 要求 上膛 现状 DroneCAN 参数已启用)或禁用飞行控制器输出的电调节流阀数据包。重新启动电调也可以更改参数。
"这款" 擦除 全部 DroneCAN 中的 "重置 "功能会将配置重置为默认状态,并自动触发重启以应用设置。
固件更新¶
电调支持通过 DroneCAN 更新固件。固件更新过程开始后,ESC 将通过 DroneCAN 调试信息报告文件读取和更新状态。在更新开始前,ESC 会自动检查文件的兼容性。
固件下载成功后,设备将自动验证并执行固件安装,然后重新启动。
备注
如果更新过程中断或无法完成,ESC 具有内置的恢复功能。如果出现问题,请重启设备并重新尝试更新。在更新中断的情况下,先前的固件版本将被保留。
固件可通过 DroneCAN GUI 或其他支持 DroneCAN 的界面(如 Mission Planner)进行更新。下图突出显示了 DroneCAN GUI 的一些主要功能;双击节点可打开节点属性面板:
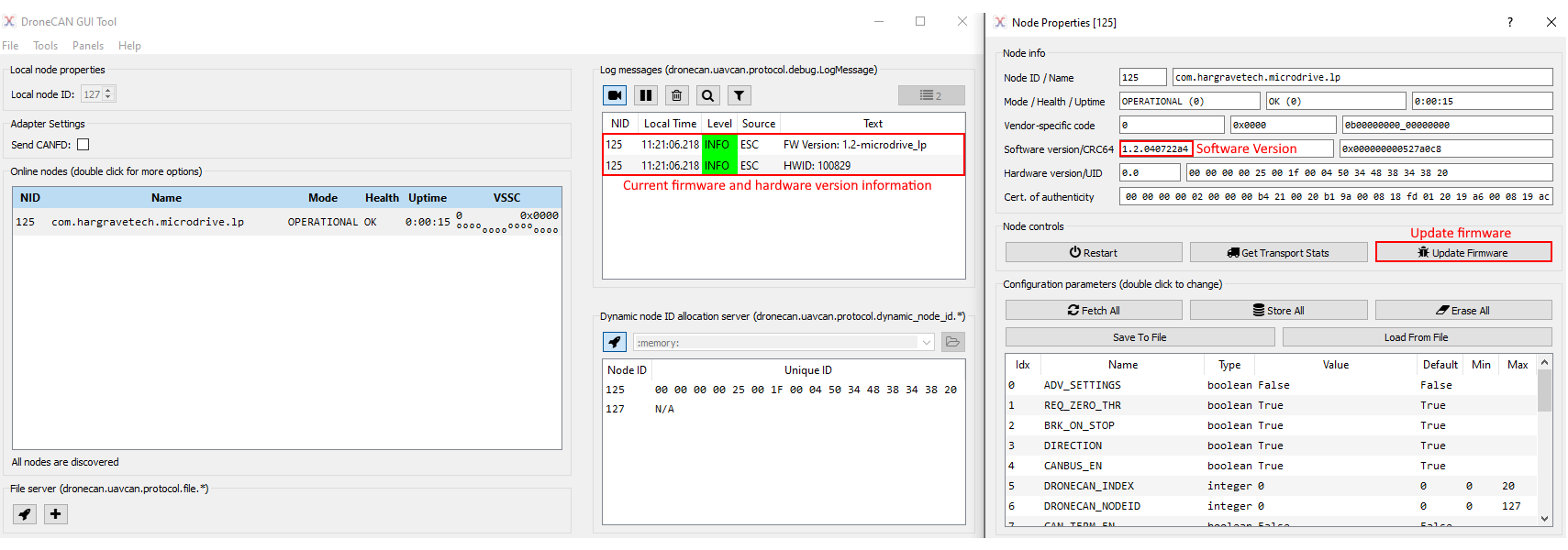
固件更新完成且设备重启后,确认报告的固件版本与预期版本一致。
更多信息¶
哈格雷夫技术公司以行业领先的技术支持为傲。如果您有更多问题或需要帮助,请联系我们的团队 这里.所有支持主题都直接转给工程团队。