继电器开关¶
继电器 "是(飞行)控制器上的一个数字输出引脚,可在 0 伏和 3.3 伏或 5 伏之间切换,具体取决于(飞行)控制器。与伺服类似,它允许(飞行)控制器从载具上的其他设备调用某些操作。最多可安装 6 个继电器。
可用作继电器的数字输出为 GPIO。正常的伺服/电机输出可配置为 GPIO 用途。有时,(飞行)控制器会将某些引脚专用于纯 GPIO 用途,如内部电源控制、通用用途等。有关引脚编号和信息,请查阅(飞行)控制器的文档。此外,还可以创建一个 DroneCAN 外设,该外设具有专用继电器引脚,可作为远程继电器进行控制。
继电器参数设置¶
继电器的设置要求设定其控制的引脚及其默认状态。此外,还可以为继电器分配一些自动驾驶功能。
下面是第二个继电器的示例:
relay2_function继电器:继电器引脚的控制可指定为普通继电器,由 GCS 或 RC 开关控制,也可指定为降落伞释放、摄像头、有刷电机反向继电器等其他功能的输出。有关数值请参见下表。非零值将在参数刷新后显示剩余参数。
RELAYx_FUNCTION |
功能 |
|---|---|
0 |
无 |
1 |
继电器 |
2 |
ICE 点火(仅限平面) |
3 |
降落伞(仅限飞机/旋翼飞行器) |
4 |
照相机 |
5 |
反向套管马达 1 节流阀或左节流阀或全能马达 1(仅限漫游车) |
6 |
反向套管马达 2 节流阀/电门-右或全向马达 2(仅限UGV无人车) |
7 |
反向套管马达 3 全向马达 3(仅适用于路虎) |
8 |
反向套管马达 4 全向马达 4(仅限路虎车) |
9 |
ICE 启动器(仅平面) |
RELAY2_PIN:(飞行)控制器指定的 GPIO 引脚用于该功能。参见 GPIO 页,了解如何确定针脚编号和使用(飞行)控制器伺服/电机输出的设置。带有远程继电器输出的 DroneCAN 外围设备的针脚编号范围为 1000 至 1015。有关使用的正确针脚编号,请查阅外设文档。
RELAY2_DEFAULT:启动后,继电器默认为打开还是关闭。这仅适用于 RELAYx_FUNC "继电器" (1)。所有其他用途都将从控制功能参数中选择适当的默认输出状态。
备注
对继电器引脚设置的任何更改都需要重新启动才能生效。
参数设置如下图所示:
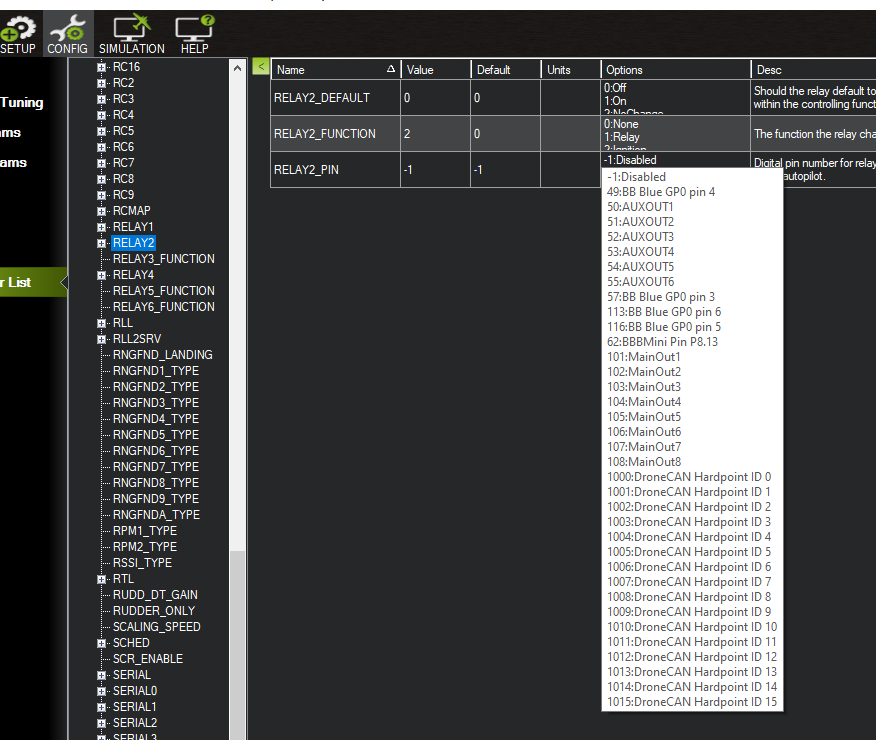
RELAYx_PIN 下拉框显示了一些常用的引脚编号,但也可以手动输入任何合适的编号。
继电器的先导控制¶
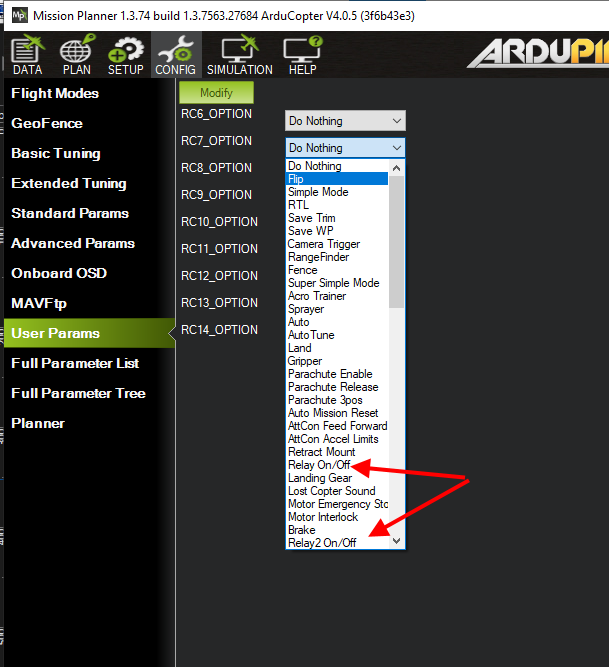
继电器可由辅助开关控制。可以通过 CONFIG(配置)/User Params(用户参数)屏幕进行设置,如下图所示:
备注
该屏幕允许设置 RC5 至 RC14,但任何 RC 通道(1-16)都可以设置其 RCx_OPTION 见 辅助功能如果尚未使用 CONFIG(配置)/Full Parameter List(完整参数列表)屏幕将其用作其他控制功能,则将其设置为 RELAY(继电器)。
中继器的任务控制¶
与伺服器类似,继电器也可以在任务期间使用 "设置继电器 "任务指令激活。相关说明见 旋翼飞行器任务指令列表维基页面.
备注
在 MAVLink 中,继电器的编号是 0-5 而不是 1-6,因此 RELAY 0 是第一个继电器
Mission Planner地面站控制继电器¶
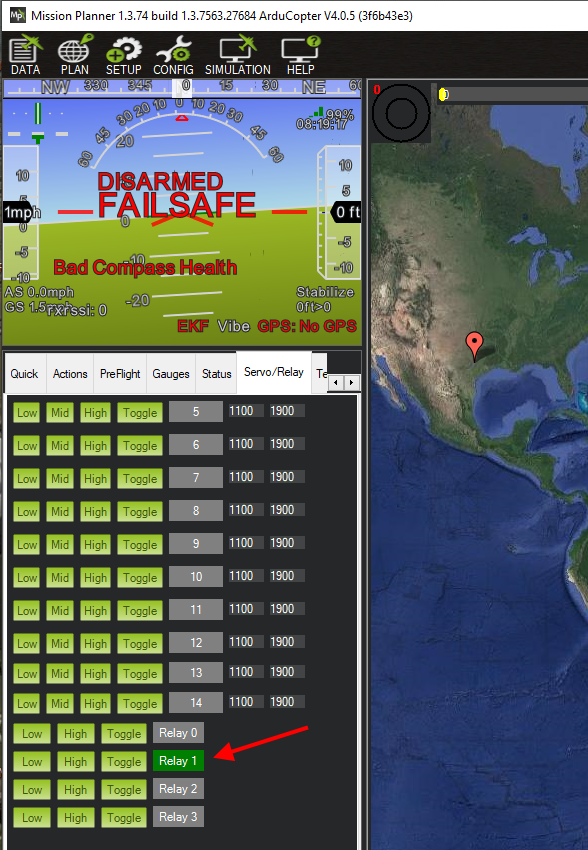
Mission Planner地面站允许用户使用按钮将前四个继电器引脚中的任何一个输出设置为低电平、高电平,或者使用数据屏幕和伺服/继电器子窗口将其设置为低电平并短暂切换为高电平,如下图所示:
备注
由于使用的是 MAVLink 控制,第一个继电器被标记为 "Relay0",与参数中的 RELAY1 相对应。