FrSky 遥测技术¶
FrSky 遥测技术允许您显示 ArduPilot 信息,如飞行模式、电池电量和错误信息,以及来自下列设备上其他 FrSky 传感器的信息 OpenTx 兼容的遥控发射机,甚至是较早的 X9R 发射机(尽管功能较为有限)。
- 它特别有用:
用于在没有地面控制站的情况下飞行(无需 MAVLink 遥测无线电)、
作为地面站出现故障(如 MAVLink 无线电链路失效)时的备份、
当地面控制站由另一人操作时、
以便飞行员快速了解情况。
此外,一些遥控发射机(如 Taranis 系列、Horus 和 T16)可通过高度可配置的 OpenTX 固件,根据遥测信息配置为播放声音、振动或执行自动遥控操作。
备注
在 ArduPilot 添加 FrSky 遥测协议之前,必须使用外部转换器将(飞行)控制器的普通 MAVLink 遥测数据转换为与 FrSky Sport 兼容的遥测数据(请参阅 "FrSky 运动")。 MavLink 至 FrSky 转换器),但现在已不再需要。不过 MAV2PT 转换器 特别适用于转换许多远程遥控系统的 MAVLink 遥测输出,以便在 OpenTX 发射器上显示,或通过蓝牙或 WiFi 转发到运行地面控制站的智能手机或个人电脑。
设置¶
要使用 FrSky 遥测技术,需要采取以下步骤:
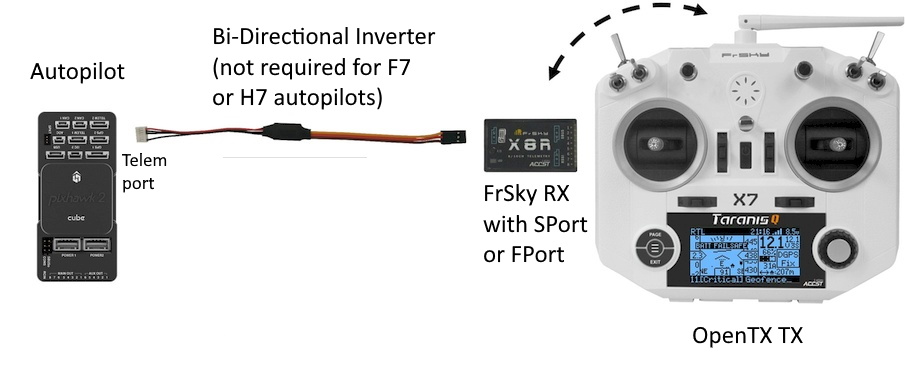
将(飞行)控制器遥测端口连接到带有 SPort 或 Fport 接口的 FrSky 接收机。这可能需要一个双向转换器,具体取决于所使用的(飞行)控制器。参见 连接 FrSky Sport 和 FPort.
配置(飞行)控制器。
安装 LUA 脚本以显示全部遥测数据。(虽然可以使用 OpenTX 内置的遥测屏幕显示遥测值的子集,但非常有限)。
连接图¶
- 参见
连接图。
配置¶
有两种协议可供选择:Repurposed 和 PassThrough。由于可以传输和显示更多的遥测信息,Repurposed 协议已被 PassThrough 协议取代。
首先将所用遥测端口的 SERIALxPROTOCOL 设置为 "10"。
备注
SERIAL 端口号不一定与 UART 或 TELEM 端口标签直接对应。请参阅您的 (飞行)控制器.
如果您拥有 F7 或 H7 自动舵,因此不需要使用外部逆变器,则必须打开 SERIAL 端口的逆变器,并将其设置为半双工。
备注
对 UART 的任何配置更改都需要重新启动才能生效。
一般来说,使用外部双向变频器的 F4 (飞行)控制器可以使用任何具有以下配置的 UART:
SERIALx_PROTOCOL=10SERIALx_OPTIONS=160(启用 TX 和 RX 引脚上的上拉/下拉功能,以满足可能需要的外部反相器电路的要求)
基于 F4 的(飞行)控制器使用接收器的 "反相 SPort "输出,可以通过配置将其连接到任何 UART 的 TX 引脚:
SERIALx_PROTOCOL=10SERIALx_OPTIONS= 4(半双工)
备注
基于 F4 的(飞行)控制器无法使用带有 "反相 SPort "输出的 RX 引脚,因为只有基于 F7/H7 的(飞行)控制器才具有 SWAP 功能。
基于 F7/H7 的(飞行)控制器可以直接连接到任何 UART 的 TX 引脚,并使用这种配置:
SERIALx_PROTOCOL=10SERIALx_OPTIONS= 7(TX/RX 反相,半双工)或 RX 引脚:
SERIALx_PROTOCOL=10SERIALx_OPTIONS= 15(反转 TX/RX、半双工、交换 TX/RX 引脚)
备注
某些 F7/H7 (飞行)控制器的 UART 上有电平/移位器,会导致半双工操作延迟,如 CubeOrange。如果上述配置无效,请尝试设置 RC_OPTIONS = 8,这将在协议中增加填充以适应这种情况。不过,在不需要的情况下使用该选项会影响运行。
设置 FRSKY_OPTIONS 将第 0 位设置为 "1",以便向显示脚本发送交替的空速和地速数据。位 用于 OpenTX 的 Yaapu FrSky 遥测脚本 可以使用,但可能会导致其他显示应用程序/脚本交替读取速度值。
显示脚本¶
有几种方案可供选择:
Turnigy 9XR Pro¶
本节介绍如何在 Turnigy 9XR Pro 发射机上启用 FrSky 遥测功能。
要求¶
配置 ArduPilot¶
确保您有适当的 序列号_协议 参数设置为 10 (通过 FrSky 遥测")来选择 ArduPilot SPORT 协议。例如,如果您将 SmartPort 电缆插入 Pixhawk 的串行 4/5 端口,请设置 serial4_protocol 至
10.
更改后重新启动控制器。
ErSky9x 还可与以下协议配合使用 4 ("重新利用 FrSky 遥测技术"),但您将无法访问特定于 ArduPilot 的信息,如当前飞行模式名称或上膛状态。
配置 9XR Pro¶
确认运行的是 211 或更高版本。导航至
无线电 设置菜单,然后选择版本.请看SVNfield.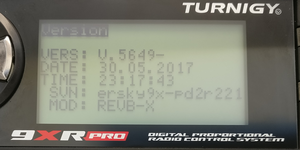
218 版及以后的版本大大改进了遥测支持。
导航至
模型 设置菜单,然后选择规程.确保原型设为XJT和类型设为D16.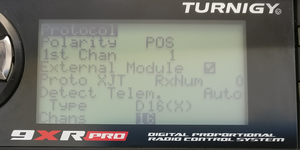
在旧版本的固件中,您可能会看到 PXX 而不是 XJT.
导航至
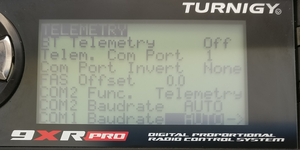
模型 设置菜单,然后选择遥测然后再次选择遥测从弹出菜单中选择确保UsrProto设置为ArduP(ArduPlane)或ArduC(用于 ArduCopter)、遥测 ......(英文 港口(此前FrSky ......(英文 港口)是1和......(英文 港口 反转(此前反转 ......(英文 1) 关闭(未选中)。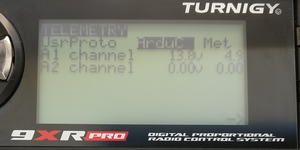
如果使用的不是 ArduPlane 或 ArduCopter,可以设置
UsrProto至FrSky.您将获得一个更基本的遥测显示屏,其中缺少图形航向指示器、当前飞行模式名称等内容。
此时,您的 9XR Pro 应该可以接收到扩展遥测数据。如果您导航到遥测主屏幕(使用向上/向下箭头在屏幕之间切换),您应该可以看到标准的 FrSky 遥测值(如 RSSI、接收机电压等)以及扩展遥测值,如飞行模式、当前测量值、GPS 信息等。

使用左/右箭头在可用的遥测视图之间切换:

配置自定义遥测屏幕¶
ErSky9x 允许您自定义两个遥测显示屏幕,并可选择信息。要配置自定义屏幕,请导航至 模型 设置然后选择 遥测然后选择
定制:

与 FrSky 遥测技术相关的其他页面