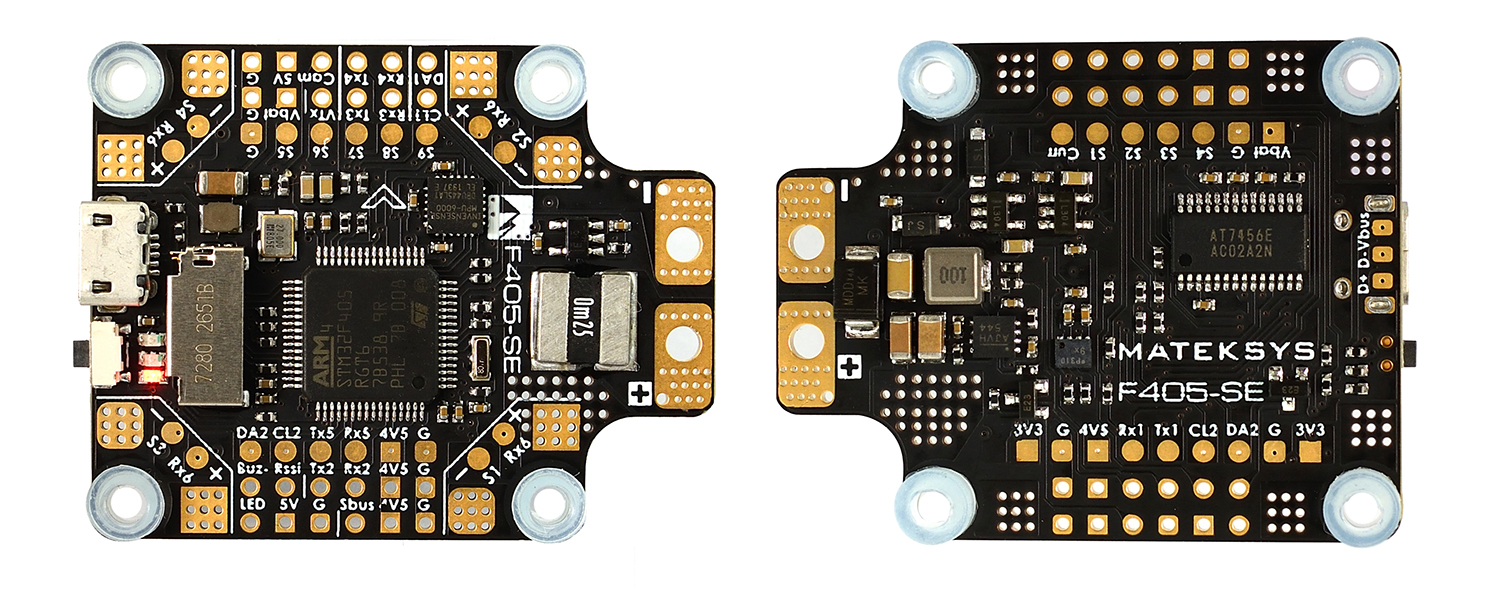
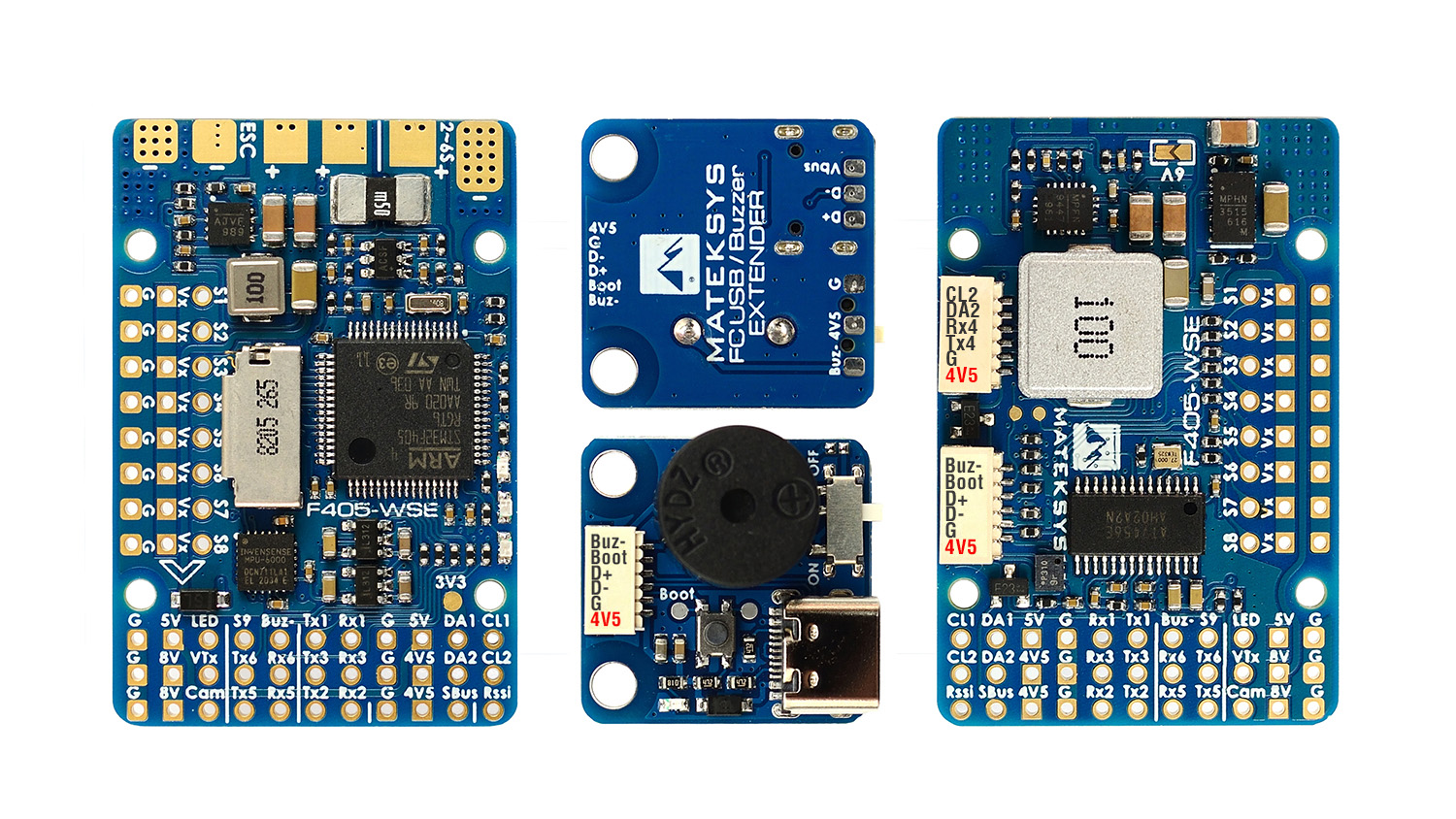
Mateksys F405-SE/WSE¶
以上图片和部分内容由 mateksys.com
备注
由于闪存限制,该电路板不包含所有 ArduPilot 功能。请参见 固件限制 了解详情。
规格¶
处理器
STM32F405RGT6 ARM(168MHz)
传感器
InvenSense MPU6000 IMU(加速度、陀螺仪)
DPS310 气压计
电压放大器;184A 电流传感器
电源
6V ~ 36V 直流输入电源
5V、2A BEC,用于 FC 和放大器;外设(GPS/Compass 等)
用于舵机的 BEC Vx 5A,5V/ 6V 可选(仅限 WSE)
用于 VTX 和摄像头的 8V 1.5A BEC(仅限 WSE)
接口
VCP & 6x UARTS
10x PWM 输出(LED 输出用作 PWM10)
1x RC 输入 PWM/PPM,SBUS
2 个 I2C 端口,用于外接罗盘和空速传感器
USB 端口
内置 OSD
3x ADC(Vbat、电流、RSSI)
微型 SD 插槽
尺寸和规格
- SE:
46 毫米 x 36 毫米(30.5 毫米间距方形安装孔)
10g
- WSE:
44 毫米 x 29 毫米 x 10 毫米(25 毫米 x25 毫米安装尺寸,2 毫米孔径)
20 克,带底板和遥控 USB/蜂鸣器板
这些电路板使用 MatekF405-Wing 固件 这里.
默认 UART 顺序¶
SERIAL0 = 控制台 = USB
SERIAL1 = Telemetry1 = USART1
SERIAL2 = 空
serial3 = gps1 = usart3
serial4 = gps2 = uart4
serial5 = user = uart5
SERIAL6 = USER = USART6(仅限 RX;对于 ESC 遥测,使用 SERIAL6_PROTOCOL=16)。
SERIAL7 = USER = USART2(仅当 BRD_ALT_CONFIG =1 时)
串行协议可根据个人喜好进行调整。
Dshot 能力¶
所有电机/伺服输出均可进行 Dshot 和 PWM 操作。然而,输出的 Dshot 和正常 PWM 操作混合使用会受到组的限制,即如果要为组中的某个输出启用 Dshot,则需要将该组中的所有输出都配置为 Dshot,而不是 PWM 输出。在配置为普通伺服/电机输出时,必须相同(PWM 速率或 Dshot)的输出组有1/2、3/4、5/6、7/8、9 和 10。
输出¶
电路板上标有前 8 个伺服/电机输出端:M1、M2、S3-S8。S9 是电路板上的焊盘,S10 连接到 ArduPilot 定义中标记为 LED 的引脚。使用 S10 可以方便地将奇数电机以共同的 DShot 或 PWM 频率分组,而不会因为速率问题而影响伺服输出的使用(见上文关于 Dshot 的讨论)。
RC 输入¶
SBUS 引脚通过反相器传递到 R2(UART2 RX),默认情况下 R2 被映射到定时器输入而不是 UART,可用于所有 ArduPilot 支持的接收器协议,但 CRSF/ELRS 和 SRXL2 除外,因为它们需要真正的 UART 连接。不过,FPort 以这种方式连接时,只能提供 RC 而不提供遥测功能。
为使 Fport、CRSF 和 SRXL2 接收机能够使用 CRSF 和嵌入式遥测功能,还可将 R2 引脚配置为真正的 UART2 RX 引脚,以便与双向系统一起使用。 BRD_ALT_CONFIG 为 "1",使其成为 SERIAL7 端口的 RX 输入引脚。
有了这个选项、 serial7_protocol 必须设置为 "23",并且:
不支持 PPM。
DSM/SRXL 连接到 R2 引脚,但 SBUS 仍连接到 SBUS。
FPort 需要通过双向逆变器与 T2 和 R2 连接。参见 FPort 接收器.
除 R2 外,CRSF 还需要 T2 连接,并自动提供遥测功能。
SRXL2 需要与 T2 连接,并自动提供遥测功能。设置 serial6_options 到 "4"。
任何 UART 都可用于 ArduPilot 中的遥控系统连接,并与除 PPM 之外的所有协议兼容(SBUS 需要在其他 UART 上进行外部反转)。请参见 无线电控制系统 了解详情。
电池监控器配置¶
这些设置在加载固件时设置为默认值,但以下情况除外 batt_amp_pervlt 需要从 31.7 改为 55.9。不过,如果它们丢失了,您可以手动设置参数:
启用电池监控器。
BATT_MONITOR =4
然后重新启动。
BATT_VOLT_MULT 11.0
batt_amp_pervlt 55.9
备注
该(飞行)控制器使用高精度电流传感器,该传感器对电调开关噪音非常敏感。请务必使用提供的旁路电容器。在某些情况下,如果电调本身没有内置 200-330uF 低 ESR 电容器,则需要在其电源输入端增加此类电容器。参见 马泰克常见问题 了解更多信息。
购买地点¶
查看此列表 Mateksys 经销商
连接 GPS/指南针模块¶
该电路板不包括 GPS 或指南针,因此需要一个 外置 GPS/指南针 必须连接,自主模式才能运行。正常的 "平面 "模式操作不需要指南针,但典型的 "旋翼机"、"垂直起降 "和 "UGV无人车 "操作需要指南针。
备注
必须插上电池,才能为 GPS/指南针模块的 5V 引脚供电。
固件¶
可以找到该电路板的固件 这里 在标有 "MatekF405-Wing "的子文件夹中。