全球定位系统/指南针(登陆页面)¶
旋翼飞行器/飞机/漫游车支持与 GPS、指南针和其他定位技术的集成:
全球定位系统/指南针¶
- 航空电子设备匿名 GNSS + 指南针
- 航空电子设备匿名指南针
- Beitain BN-220 GPS / BN-880 GPS + 罗盘模块
- CUAV Neo v2 Pro DroneCAN GPS
- CUAV Neo 3 Pro 无人机CAN 全球定位系统
- CUAV Neo 3(M9N)全球定位系统
- CUAV Neo 3X(防水)GPS
- CubePilot Here 2 DroneCAN GPS/Gyro/IMU/Baro
- Holybro DroneCAN M8/M9 GPS
- Holybro Micro M8N GPS 模块
- Holybro Nano Ublox M8 5883 GPS 模块
- Holybro M8N(Pixhawk 4)GPS 模块
- Holybro M9N GPS 模块
- Holybro DroneCAN RM3100 专业级指南针
- Matek DroneCAN AP_Periph GNSS M10-L4-3100
- 马泰克 SAM-M8Q
- Matek M8Q-CAN/DroneCAN GPS+Compass+Baro+Airspeed I2C 端口
- mRo GPS、GPS+Compass、RTK 和 DroneCAN 模块
- mRo Locaton One DroneCAN GPS/指南针
- Qiotek DroneCAN GNSS M10 QMC5883
- Qiotek GNSS M10 QMC5883
- Qiotek DroneCAN RM3100 罗盘
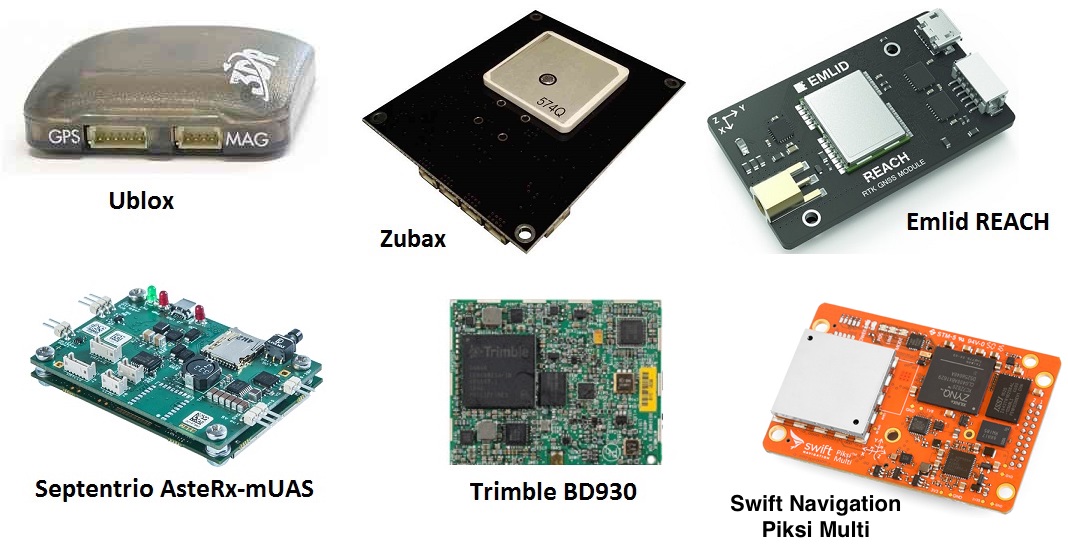
- Zubax GNSS 2:全球导航卫星系统 + 罗盘 + 气压计
RTK GPS¶
这些全球定位系统可结合内部生成或外部提供的实时运动学数据,以提高位置估算的精度,从正常的全球定位系统米级范围降低到厘米级范围(见图 1)。 RTK GPS 校正(固定基线)).精度提高后,还可以使用载具上的两个设备和某些 RTK GPS(基于 F9P)或专用移动基线 GPS 进行 "移动基线 "偏航估算。参见 偏航/航向 GPS(又称移动基线).
- ArduSimple RTK GPS
- 方舟 RTK GPS
- Blicube RTK GPS(单体移动基线 NMEA)
- CUAV C-RTK 9P RTK 接收器
- CUAV C-RTK 9Ps RTK 接收机
- CUAV C-RTK2 PPK 和 RTK 接收机
- CUAV C-RTK2 HP 方位和 RTK 接收机
- Emlid Reach RTK 接收器
- CubePilot HERE 3/3+ DroneCAN RTK GPS/IMU/指南针
- CubePilot HERE 4 DroneCAN RTK GPS/IMU/指南针(见下文说明)
- CubePilot Here+ RTK 基地/漫游接收器
- CubePilot HEREPRO DroneCAN F9P RTK GPS/指南针
- Freefly RTK GPS 地面站
- Foxteck AEROFOX F9P-RTK
- Hitec PositionPro 全球导航卫星系统
- Holybro DroneCAN H-RTK F9P 漫游车
- Holybro DroneCAN H-RTK F9P 旋翼飞行器
- Holybro RTK M8P 系列
- Holybro RTK F9P 系列
- Holybro RTK F9P 超轻型
- Holybro RTK Unicore UM982 GPS
- LOCOSYS HAWK R1 RTK GNSS / R2 RTK GNSS + 指南针
- Qiotek DroneCAN RTK-F9P GPS
- Swift Navigation 的 Piksi Multi RTK GPS 接收机
- Septentrio AsteRx-m UAS RTK GPS
- Synerx MDU-2000 RTK + LTE GPS
- Trimble BD930 RTK GNSS
- Trimble PX-1 RTX GNSS+INS
备注
CubePilot HERE 4 DroneCAN RTK GPS 的固件版本可用 这里 其中包括不断改进的 ArduPilot。
警告
重要的是,GPS 必须连接到第一个 SERIALx 端口,该端口有 SERIALx_PROTOCOL 参数设置为 "5"(GPS),因为如果在为 GPS 协议配置的第一个端口上未找到 GPS,它将在启动过程中停止搜索 GPS。
移动基线(GPS 用于偏航)功能¶
Ark RTK GPS <;https://arkelectron.com/product/ark-rtk-gps/> Blicube RTK GPS(单体移动基线) <;https://wiki.blicube.com/grtk/> CUAV C-RTK 9P RTK Receiver <common-cuav-c-rtk-9p-gps> CUAV C-RTK 9Ps RTK Receiver <;https://store.cuav.net/shop/c-rtk-9ps/< CUAV C-RTK2 PPK 和 RTK 接收机<comm-cuav-c-rtk2> CUAV C-RTK2 HP Heading 和 RTK 接收机<comm-cuav-c-rtk2-hp> CubePilot HERE 4 DroneCAN RTK GPS/IMU/Compass <;https://docs.cubepilot.org/user-guides/here-4/here-4-manual> CubePilot HEREPRO DroneCAN RTK GPS/Compass <;https://docs.cubepilot.org/user-guides/herepro/herepro-manual> Foxteck AEROFOX F9P-RTK <;https://www.foxtechfpv.com/aerofox-f9p-rtk-unit.html> Freefly RTK GPS 地面站 <;https://store.freeflysystems.com/products/rtk-gps-ground-station> Holybro DroneCAN H-RTK F9P Rover <;https://holybro.com/collections/gps-rtk-systems/products/dronecan-h-rtk-f9p-rover> Holybro DroneCAN H-RTK F9P Helical <;https://holybro.com/collections/gps-rtk-systems/products/dronecan-h-rtk-f9p-helical< Holybro RTK F9P Family <common-holybro-rtk-f9p> Holybro RTK F9P Ultralight <;https://holybro.com/products/h-rtk-f9p-ultralight> Holybro RTK Unicore UM982 GPS <;https://holybro.com/products/h-rtk-unicore-um982> Qiotek DroneCAN RTK-F9P GPS <;https://www.qio-tek.com/index.php/product/qiotek-zed-f9p-rtk-and-compass-dronecan-module> Synerx MDU-2000 RTK + LTE GPS <common-synerex-mdu-2000>;
GPS 驱动程序选项¶
全球定位系统提供多种操作选项 gps_drv_options 参数。该参数是一个位掩码,允许同时选择多个选项:
第 0 位:如果设置,将通过第二个 GPS 的 UART 端口将第一个 GPS 的 RTK 修正数据直接发送到第二个 GPS,以便 偏航/航向 GPS(又称移动基线)而不是通过(飞行)控制器。
第 1 位:如果设置,则使用自定义基线和 GPS_MB1 偏移启用 SBF 移动基线偏航。
第 2 位:如果设置,对于无法使用更高速率的 GPS,使用 115.2Kbaud 作为最大串行数据速率。
位 3:如果设置,则通过 CAN 而不是(飞行)控制器在两个 CAN GPS 之间路由 RTK 数据。
第 4 位:如果设置,GPS 将以椭球面高度而不是 AMSL 高度报告高度。
GPS 自动开关¶
在使用两个 GPS 设备时,有许多切换选项可供选择,其中包括 gps_auto_switch.
- 0: 使用初级
始终使用主全球定位系统,可以是第一或第二全球定位系统,设置为 GPS_PRIMARY
- 1: 使用最佳
根据 GPS 定位状态(2D/3D/rtk)自动选择最佳 GPS,如果两个 GPS 定位状态相同,则使用卫星数量较多的那个。
- 2: 混合
混合器最适合与两个相同的 GPS 设备一起使用,请参见 GPS 混合
- 4: 如果有 3D 定影或更好的定影效果,则使用初级定影
使用用 GPS_PRIMARY 如果它有 3D 定位或更好的定位。当使用两个不同的 GPS 设备(一个是高质量的主设备,另一个是精度较低的辅助设备)时,应使用这种方法。在这种情况下,质量高的 GPS 即使卫星数量较少,通常也能获得质量更好的定位。在这种情况下使用 "使用最佳 "会导致使用质量较差的 GPS,并导致在 GPS 设备之间进行更多切换。与 "使用主要 "不同的是,如果主要 GPS 上的 3D 定位丢失,该选项仍允许回退到辅助 GPS。
GPS 切换的另一个变化是 EKF3 耦合力和车道切换.EKF 车道可设置为使用任一种 GPS,然后根据其健康状况切换整个 EKF 车道。如果 GPS_PRIMARY 用于车道,而 gps_auto_switch 启用,则车道将使用由 gps_auto_switch 设置。