APSync¶
APSync 简化了配套计算机的设置,使其可用于为 ArduPilot 提供额外功能,并方便与互联网服务集成。
当前版本可在启动时自动创建 Wifi 接入点,允许将 DataFlash 日志记录到配套计算机上,并可从无人机上的摄像头 "简单 "地将实时视频流传输到地面站。
支持的配套计算机有 RPi3, 英伟达 TX1, NVidia TX2 和 英特尔爱迪生.
备注
不支持从英特尔 Edison 播放视频流。
安装说明 在本页底部。
请在 ArduPilot 论坛.开发人员可以通过提交 PR 到 ArduPilot/companion 和/或与其他开发人员在计算机辅助渠道中进行讨论 ArduPilot Discord 聊天室!
Wifi 接入点及数据闪存记录¶
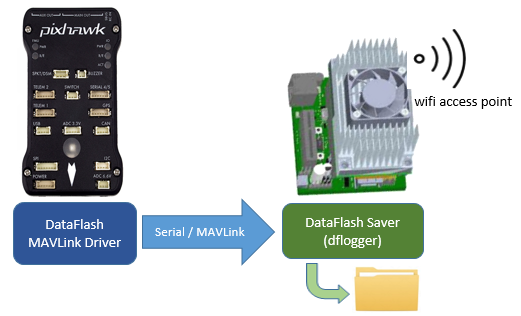
启动时会创建一个接入点,名称为 "ardupilot"。默认密码也是 "ardupilot"。
用户可以连接到该接入点,然后通过设置地面站(包括Mission Planner地面站),使用 14550 端口的 "UDP "连接,轻松连接到(飞行)控制器上运行的 ArduPilot。
- 连接到 WiFi 网络后,就可以连接到这两个 URL:
http://10.0.1.128 (配置 页面) http://10.0.1.128:8000 (其中 显示 a 视频 分流 关于/关闭 按钮)
数据闪存日志通过 MAVLink 流式传输到配套计算机,并存储在配套计算机的文件系统中(以及 pixhawk 的数据闪存中)。然后可以使用脚本(Windows 用户可以使用 apsync 下载日志),或者从配套电脑中拔出 SD 卡。
简单配置网页¶
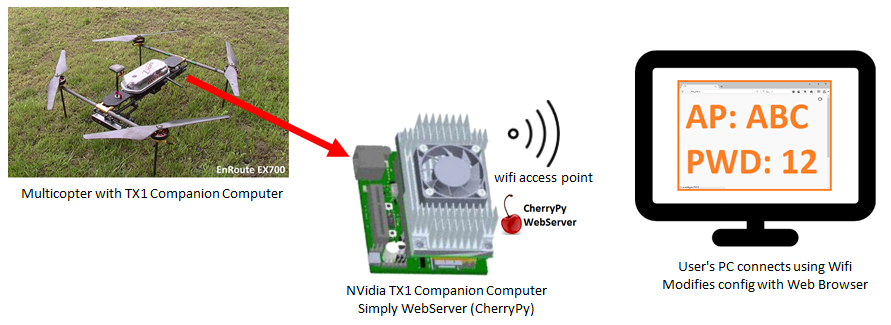
配套计算机上运行着一个轻量级网络服务器,用户可以使用已知的 URL(URL)连接到无人机。http://10.0.1.128 或 http://10.0.1.128:8000)并执行以下操作:
查看和修改参数
查看传感器信息并触发一些校准
修改 Wifi 接入点名称和密码
如果日志文件存储在配套电脑上,可查看和下载日志文件
简单视频¶
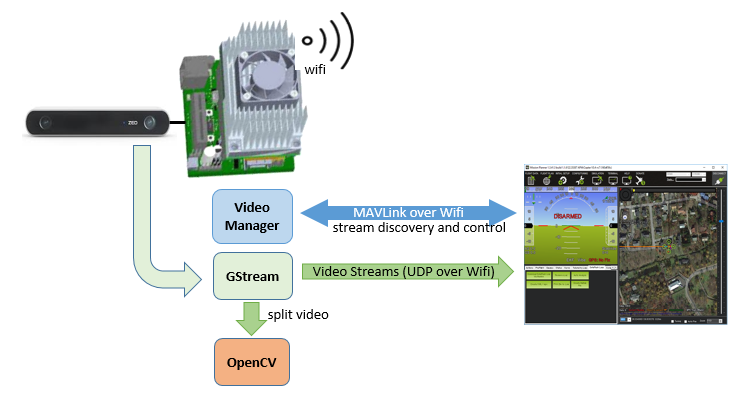
向第一个请求遥测数据的地面站 IP 地址发送单个视频流。
安装 APSync¶
有关支持的电路板的图片,请参见 firmware.ardupilot.org.
请按照每个电路板维基页面上的说明安装这些图像 (RPi3, 英伟达 TX1 和 英特尔爱迪生).
应通过设置以下参数配置飞行控制器(即 Pixhawk 或类似设备),以便与配套计算机通信,然后重新启动电路板:
SERIAL2_BAUD 921(用于 RPi3、TX1 和 Edison)或 1500(用于 TX2)
日志后端类型 3
使用 SSH 连接¶
您可以使用终端模拟器(如 油灰 连接到电路板的无线接入点,然后 ssh 到 10.0.1.128 用户名:apsync,密码:apsync
如何将飞行控制器数据传输到各种程序¶
默认情况下,Apsync 使用 "mavlink-router "允许配套计算机上运行的多个程序与飞行控制器对话。该程序配置保存在 ~/start_mavlink-router/mavlink-router.conf 中,并定义了以下连接:
/dev/ttyTHS1,波特率 1500000,用于与飞行控制器通信(TX1/TX2)。
在配套计算机上运行的 MavProxy 的 UDP 127.0.0.1:14655
用于 dflogger 的 UDP 127.0.0.1:14556(将数据闪存日志写入配套计算机)
UDP 127.0.0.1:14755 用于 APweb(小型配置网络服务)
UDP 127.0.0.1:14765 用于 OpenKai(视觉处理程序,类似于 ROS)
UDP 10.0.1.255:14765 用于通过 Wifi 向地面站发送遥测数据
如果在配套计算机上运行的其他程序也需要飞行控制器提供数据,可在 ~/start_mavlink-router/mavlink-router.conf 的底部添加新行来打开新端口,然后重启板卡。
例如,可以添加以下几行来开放 14855 端口,供本地运行的 ROS 在配套计算机上使用:
[UdpEndpoint to_ros]
模式 = 正常
地址 = 127.0.0.0.1
港口 = 14855