在 Windows 上设置 Eclipse¶
本页介绍如何在 Windows 上设置 Eclipse,以便使用 waf(允许为所有支持的板卡构建)进行构建。
备注
这些说明假定您已经 使用 Cygwin 在 Windows 上设置构建环境
移除 Pixhawk 工具链(如果存在)¶
如果您一直使用 旧方法依赖于 Make 首先通过重命名 C:\pixhawk_toolchain 目录中的 C:\pixhawk_toolchain.bak
安装并运行 Eclipse¶
运行下载的 eclipse 安装程序,选择 "Eclipse IDE for C/C++ Developers"(面向 C/C++ 开发人员的 Eclipse IDE
在要求时接受 Eclipse 基金会证书
启动 Eclipse,点击右上角的 "工作台 "按钮
导入 ArduPilot¶
启动 Eclipse 后,按以下步骤导入 ArduPilot:
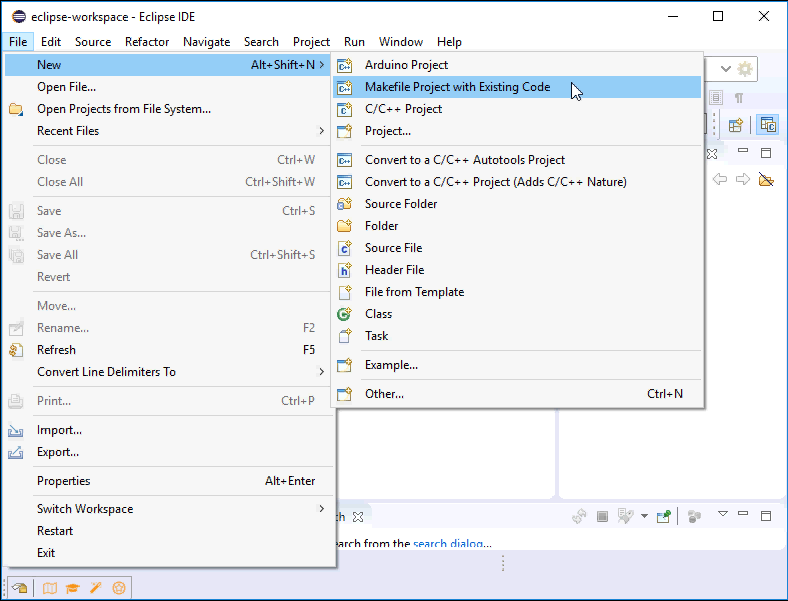
选择文件,新建,使用现有代码制作文件项目
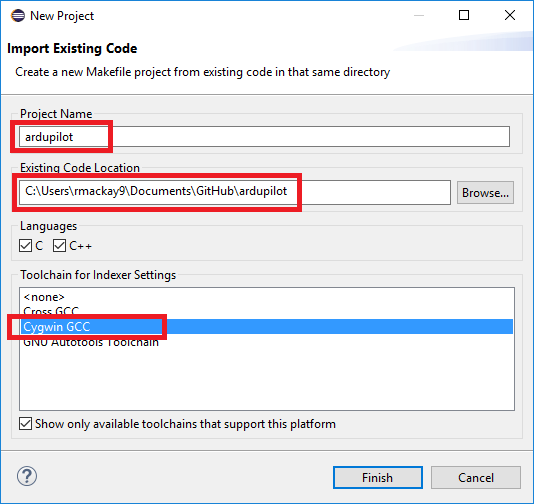
当 "新建项目 "窗口出现时,选择 ardupilot 的文件夹。 克隆 并选择工具链为 "Cygwin GCC
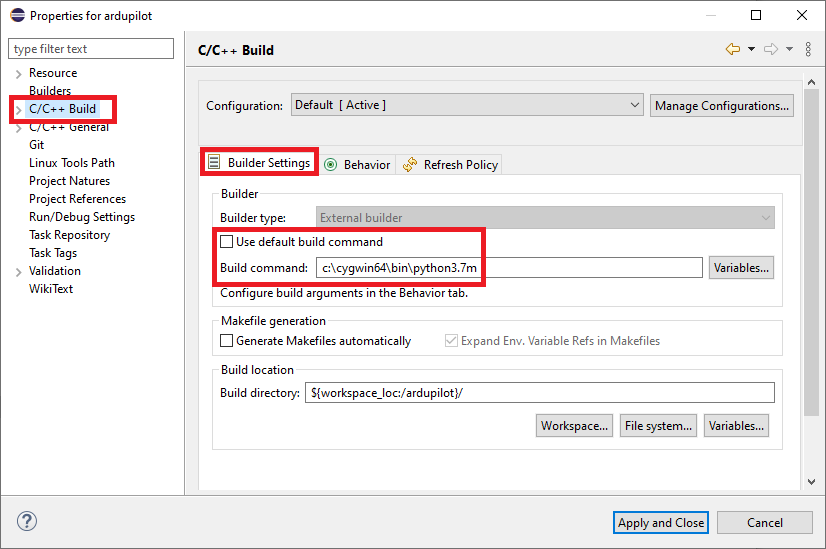
在右上角的 "项目浏览器 "选项卡中,用鼠标右键单击 "ardupilot "文件夹,然后选择 "属性"。
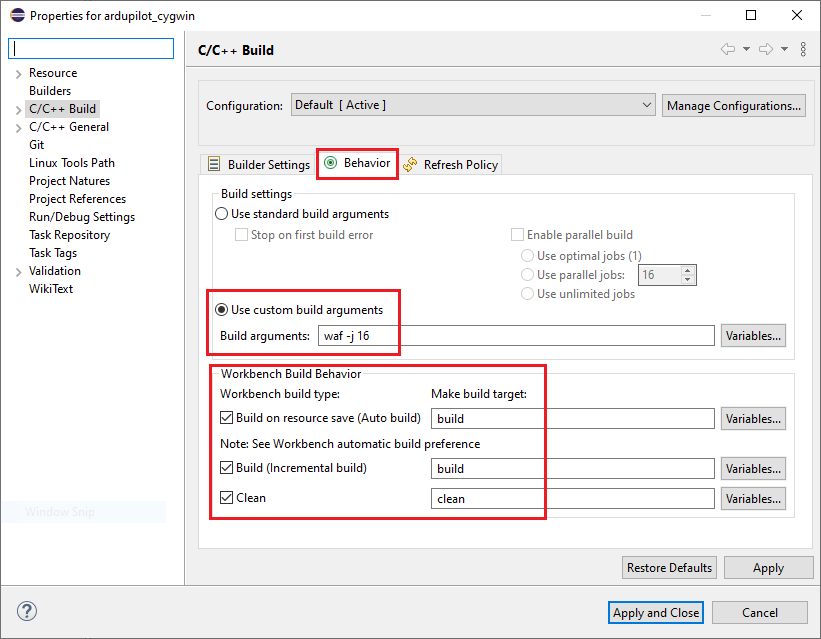
出现 "Properties for ardupilot(ardupilot 属性)"窗口后,在 "C/C++ Build(C/C++ 生成)"下取消选中 "Use default build command(使用默认生成命令)",然后输入
c:c\cygwin64\bin\python3.7m如下所示
点击 "行为 "选项卡,选择 "使用自定义构建参数",输入
waf.其他参数,如-j 16可在此处添加。论点-j 16将 Cygwin 配置为使用本例中 8 核机器的 16 个逻辑处理器。设置 "工作台构建行为 "将允许使用内置按钮来清理和构建所有目标。请注意,如果您希望只使用这些按钮来构建单一载具类型,请将 "构建 "改为 "旋翼飞行器"。
设置构建目标¶
在右侧的 "构建目标 "选项卡中选择 "ardupilot",然后按下绿色的 "新构建目标 "按钮。
在 "目标名称 "字段中输入
配置 --板 fmuv3 --无子模块更新然后按 "确定",创建一个构建目标,以便使用 ChibiOS 为 Pixhawk/Cube 飞行控制器配置 waf 构建功能创建另一个名为
旋翼飞行器运行这两个目标,为 Pixhawk/Cube 飞行控制器创建 ArduPilot Copter 二进制程序
如果编译失败,提示 "缺少配置文件",请检查 ardupilot 目录中是否有名为 "build "的目录,将其删除后再试一次
其他有用的构建目标包括
清洗,飞机,无人车UGV和--帮助
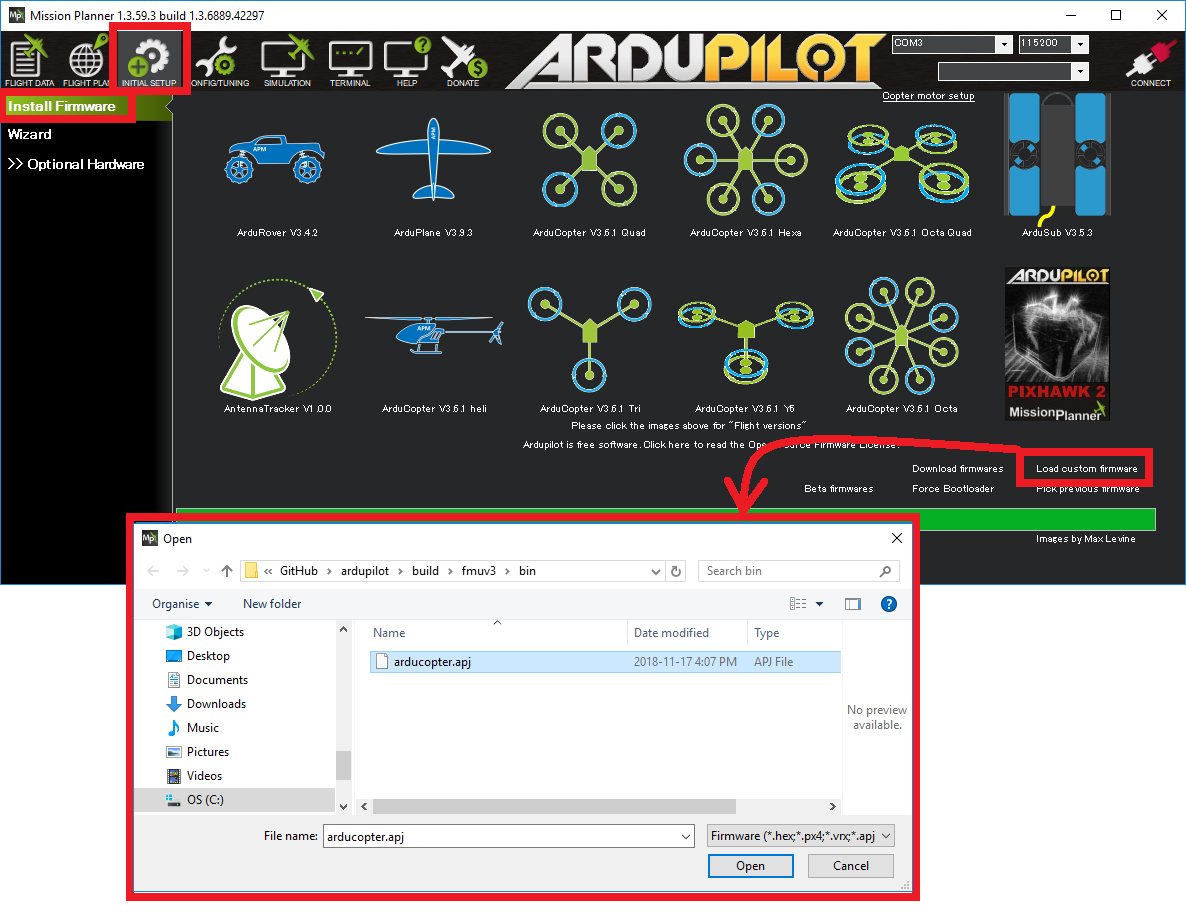
arducopter.apj 固件将在 ardupilot\build\fmuv3\bin 目录,并可从Mission Planner地面站或其他地面站上传。
备注
"这款" 配置 上述构建目标需要 --无子模块更新 的子模块更新步骤还不能与此处描述的设置一起工作。我们希望将来能解决这个问题,但在此之前,请打开一个 git bash 终端并运行 git 子模组 更新 --递归 如果你认为子模块最近已更新。
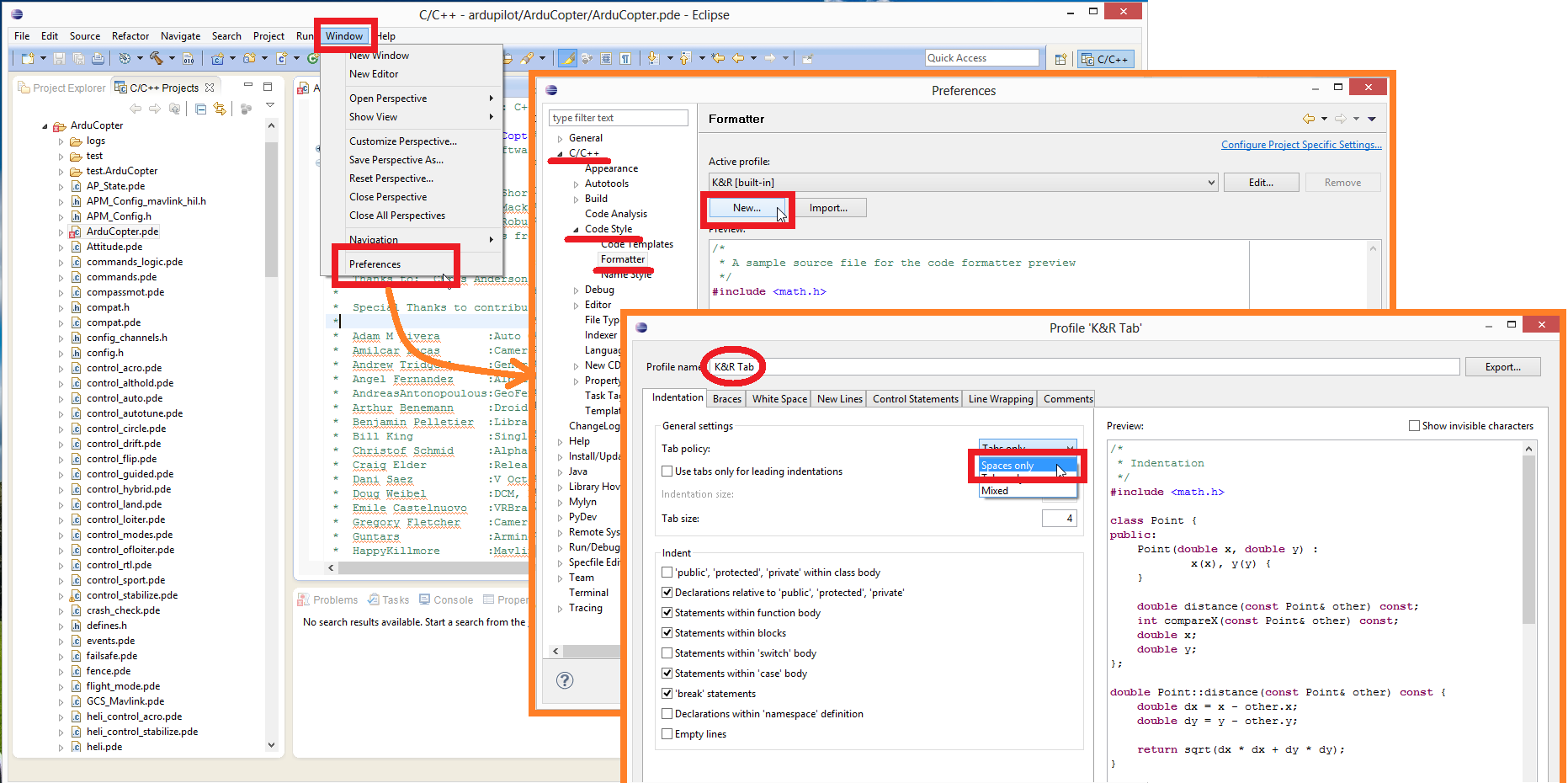
用空格代替制表符¶
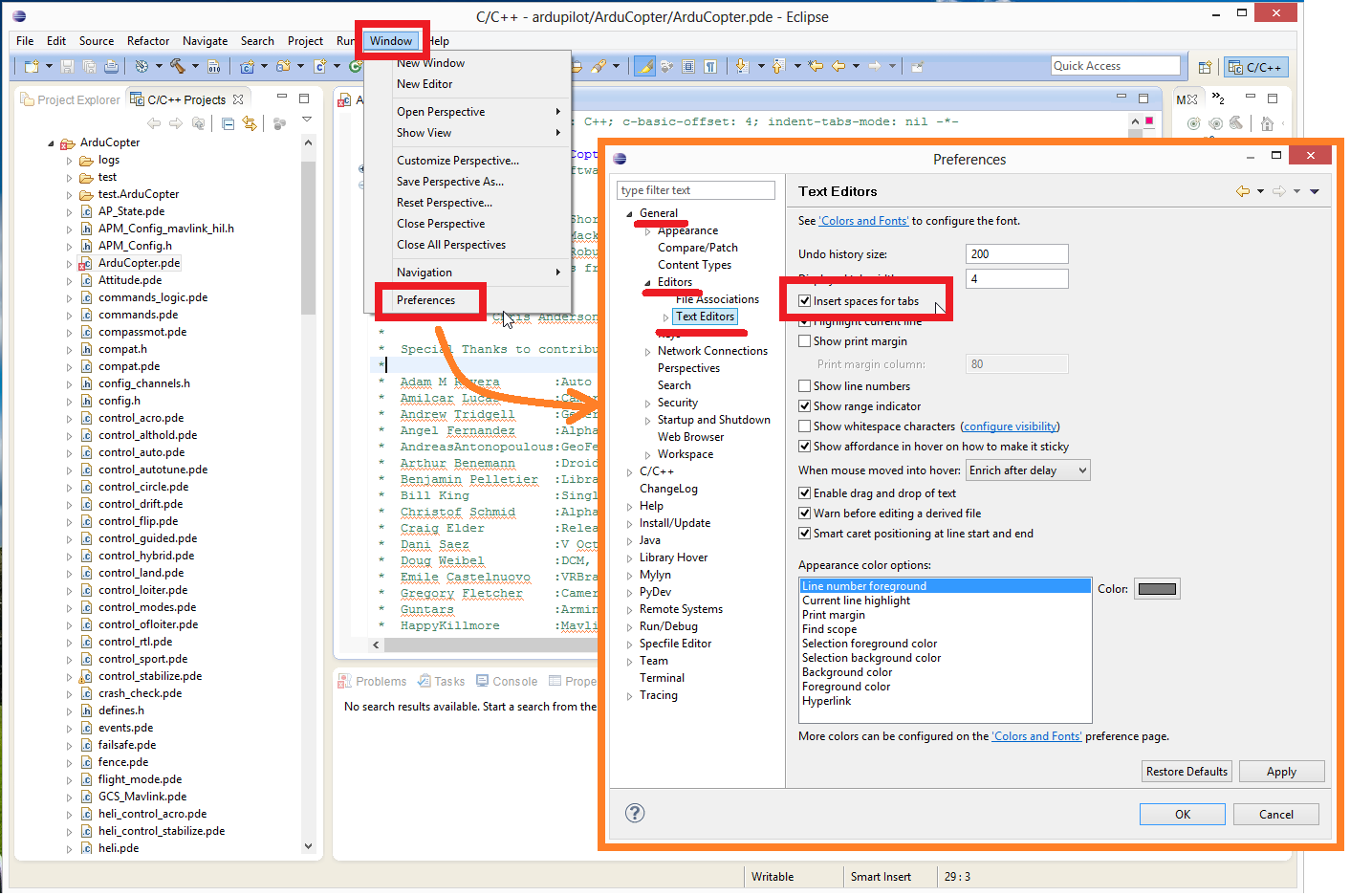
默认情况下,Copter、Plane 和 Rover 使用空格代替制表符。在 Eclipse 中可以通过更改以下两个设置将其设置为默认值
选择 窗口 | 首选项 | 常规 | 编辑器 | 文本编辑器 | 为制表符插入空格.
选择 Windows | 首选项 | C/C++ | 代码风格 | 格式化器 并创建一个新的配置文件(即 "K&R Tab"),将 "缩进 "设置为 "仅空格"。