归档:使用 Make 在 Windows 上构建 Pixhawk¶
警告
存档文章
ArduPilot 不再支持 make。
本文介绍了如何在 Windows 上为 Cube、Pixhawk 和 PixRacer 构建 ArduPilot,并使用 制作.这些说明假定您已经 设置构建环境
备注
构建 Pixhawk 的命令是 (生产 px4-v2).立方体的建造方法相同,但 生产 px4-v3 使用。Pixracer 的构建过程与此相同,只是 生产 px4-v4 使用。对于较旧的(过时的)PX4,使用 生产 px4-v1.
建造说明¶
打开 PX4Console 并导航到目标载具目录:
启动 PX4Console.可在 开始 | 所有程序 | PX4 工具链 (Windows 7 机器)或直接运行 C:\px4\toolchainms\ys\1.0\px4_console.bat
导航到特定于载具的 ArduPilot 目录,该目录位于 PX4Console.例如,要构建 Copter,请导航至 :
CD /c/用户/<;用户名>/文件/GitHub/ardupilot/ArduCopter
输入以下命令之一,生成固件:
|
为四轴飞行器构建 Pixhawk 固件 |
|
为四通道构建立方体固件 |
|
为 quad 构建 PixRacer 固件 |
|
为四旋翼飞行器同时构建 PX4(已过时)和 PixHawk 固件 |
|
"清理 ardupilot 目录 |
|
"清理 "PX4Firmware 和 PX4NuttX 目录,以便下次构建时完全重建它们 |
|
从 PX4Firmware 和 PX4NuttX 目录中 "清除".d 和 .o 文件。与 "px4-clean "相比,"清除 "速度更快,但重建不彻底。 |
|
为四轴飞行器构建并上传 Pixhawk 固件(即无需使用地面站进行上传) |
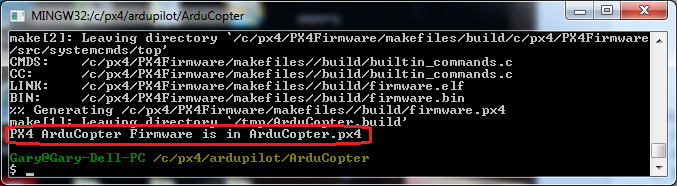
固件将在 ArduCopter 目录中的 .px4 文件扩展名。
使用 Mission Planner地面站 初始设置 | 安装固件 屏幕的 加载自定义固件 链接
备注
ArduPilot 可导入附加项目 (PX4 固件, PX4NuttX, uavcan)为 git 子模块 当你构建项目时。如果在子模块变更之前构建项目,可能会出现错误。请参见 Git 子模块 获取故障排除信息。
备注
您可以忽略任何有关 PX4Firmware 和 PX4Nuttx 哈希值的信息。这些标签对开发人员很有用,但可有可无,有时构建系统无法在系统中找到它们。只要显示 "Firmware is in...(固件在...中)",后面跟一个 .px4 文件,就说明构建成功,可以安全地加载到飞机上。
加快编译速度的提示¶
反病毒保护可能会减慢编译速度,尤其是 PX4,因此建议将包含 ArduPilot 源代码的文件夹排除在病毒保护实时扫描之外。
后的第一次扫描 生产 px4-clean 会非常缓慢,因为它会重建所有东西