mRo Nexus¶
"这款" mRo Nexus 是 mRo 的 Pixracer (飞行)控制器家族的新成员。
概述¶
"这款" mRo Nexus 是 mRobotics 下一代 Pixracer (飞行)控制器系列中的一员。它专为超小型应用而设计,主要使用 CAN 外围设备以及标准 GPS/罗盘或空速传感器。它包括一个集成的 ADS-B 接收机,用于规避。
提示
在撰写本文时,(飞行)控制器仍在不断发展/改进中。最终版本可能与此处提供的信息略有不同。
规格¶
处理器:
MUCU - STM32H743VIH6
2MB 闪存允许闪存 ArduPilot 的全部功能
传感器
陀螺仪/加速计:Invensense ICM-40609D / 陀螺仪 (? KHz)
气压计DSP310
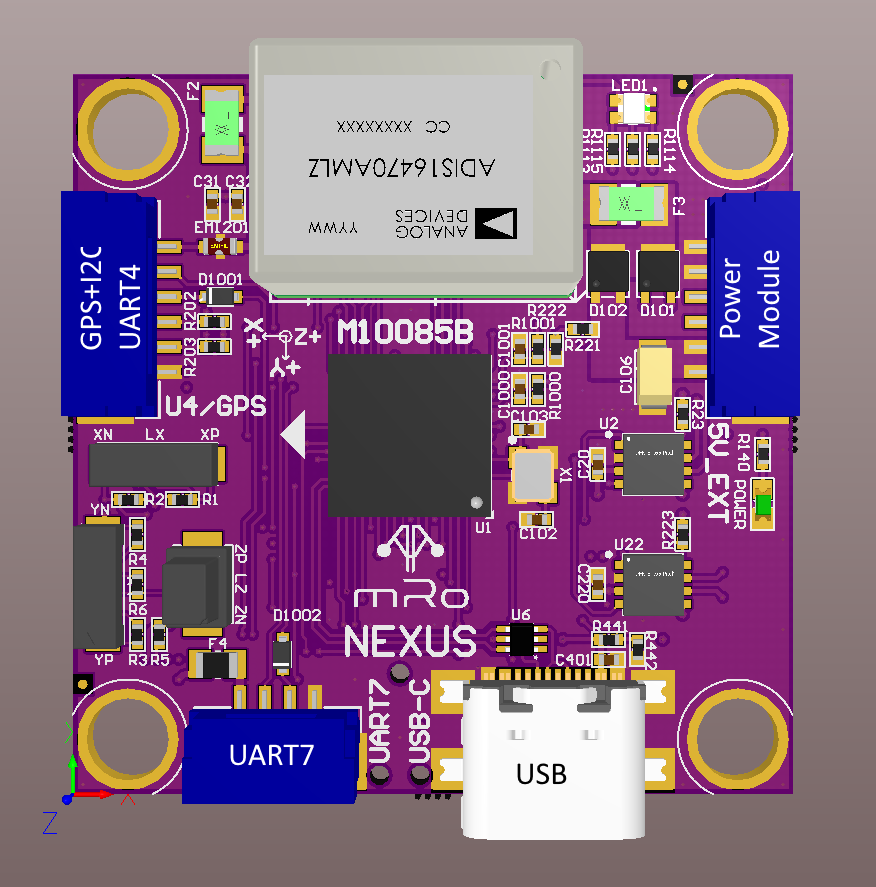
RM3100 精确罗盘
电源
来自 USB 或 PowerBrick 连接器的 5-5.5VDC 电压。可选/推荐 ACSP4 +5V/+12V电源.
用于传感器和 FMU 的超低噪声 LDO
接口/连接性
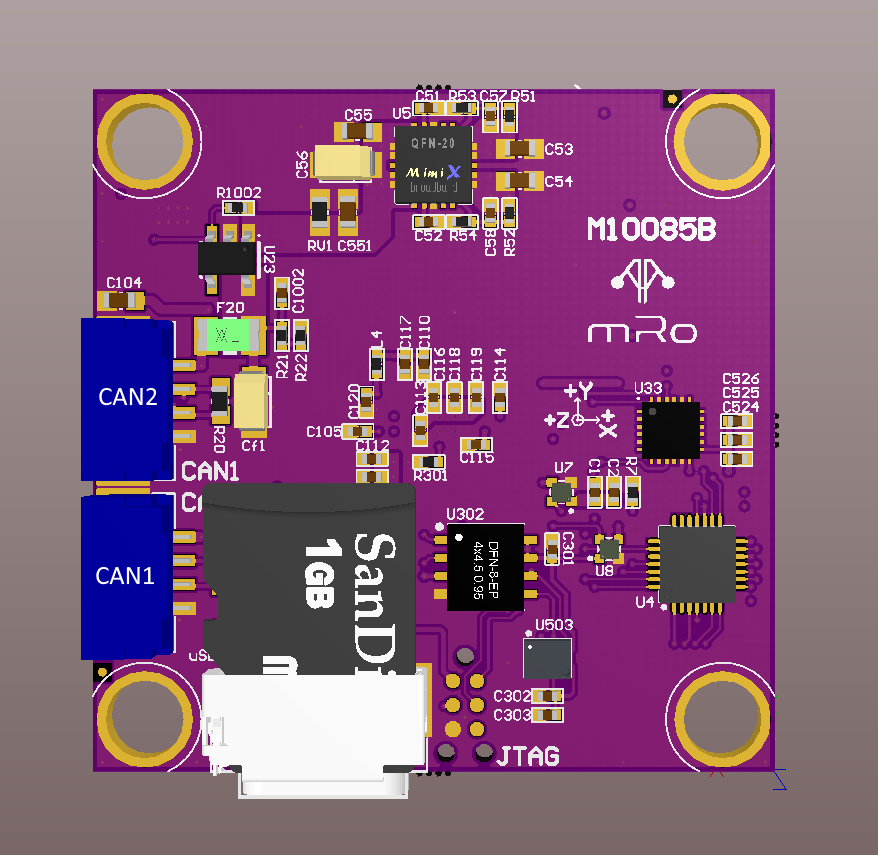
双 CAN/DroneCAN 端口
MicroSD 读卡器
Micro-C USB
RGB LED
GPS(串行 + I2C)
用于串行 RC 输入的 UART
连接器:GPS+I2C(USART4)、CAN1、CAN2、USART7(TxD、RxD)、POWER-BRICK(VDD、电压、电流、接地)。
尺寸
重量?
尺寸
连接器针脚分配¶
除非另有说明,所有连接器均为 JST GH
UART7 连接器¶
密码 |
信号 |
电压/容差 |
|---|---|---|
1 |
+5V |
+5V |
2 |
TX1 |
+3.3V/5V |
3 |
RX1 |
+3.3V/5V |
4 |
接地 |
接地 |
USART4(GPS+I2C)连接器¶
密码 |
信号 |
电压/容差 |
|---|---|---|
1 |
+5V |
+5V |
2 |
德克萨斯州 |
+3.3V/5V |
3 |
RX |
+3.3V/5V |
4 |
SCL |
+3.3V/5V |
5 |
SDA |
+3.3V/5V |
6 |
接地 |
接地 |
CAN1 和 CAN2 连接器¶
密码 |
信号 |
电压/容差 |
|---|---|---|
1 |
+5V |
+5V |
2 |
CH |
+3.3V/5V |
3 |
CL |
+3.3V/5V |
4 |
接地 |
接地 |
电源连接器¶
密码 |
信号 |
电压/容差 |
|---|---|---|
1 |
+5V输入 |
+5V |
2 |
+5V输入 |
+5V |
3 |
CURR 感知 |
+3.3V/5V |
4 |
电压感应 |
+3.3V/5V |
5 |
接地 |
接地 |
6 |
接地 |
接地 |
默认 UART 顺序¶
参数 |
默认协议** |
连接器/建议用途 |
|---|---|---|
序号 0 |
游戏机 |
USB |
序号1 |
遥测1 |
UART7/串行 RC 输入 |
序号2 |
遥测2 |
USB(第二个复合 USB 接口)/SLCAN |
序号3 |
GPS1 |
UART4/GPS |
** 用户可根据应用需要更改 SERIALx_PROTOCOL。