makeflyeasy PixPilot-C3¶
PixPilot-C3 是一款低成本的飞行控制器,带有完全冗余的 IMU。在大多数情况下,板载罗盘更容易受到干扰,因此我们去掉了板载罗盘,改用外部罗盘。集成高增益蜂鸣器。PixPilot-C3 飞行控制器由 makeflyeasy() 网站上列出的一系列经销商销售。http://www.makeflyeasy.com)
规格¶
处理器:
32 位 STM32F427VIT6 ARM Cortex M4 内核,带 FPU
168 Mhz/256 KB RAM/2 MB 闪存
32 位故障安全协处理器(STMF103)
传感器
两个冗余 IMU(加速度计和陀螺仪)
陀螺仪/加速度计:两个 ICM42688-P(SPI)
气压计两个冗余 BMP388 气压计
电源
带自动故障切换功能的冗余电源
电源 4V-6V
接口
14x PWM 伺服输出(8 个来自 IO,6 个来自 FMU)
S.Bus 伺服输出
用于 CPPM、Spektrum / DSM 和 S.Bus 的 R/C 输入
5x 通用串行端口
2 个 I2C 端口
2 个 CAN 总线接口
MicroSD 读卡器
Type-C USB
高功率压电蜂鸣器驱动器
安全开关 / LED
舵机轨道 BEC 用于舵机的独立电源输入
尺寸
重量 40 克
尺寸 74 毫米 x 45 毫米 x 16 毫米
UART 映射¶
SERIAL0 -> 控制台(主 mavlink,通常为 USB)
SERIAL1 -> USART2(telem1,启用 DMA)
SERIAL2 -> USART3(Telem2,支持 DMA)
SERIAL3 -> UART4 (GPS1)
SERIAL4 -> UART8(GPS2,支持 DMA)
SERIAL5 -> UART7 (USER)
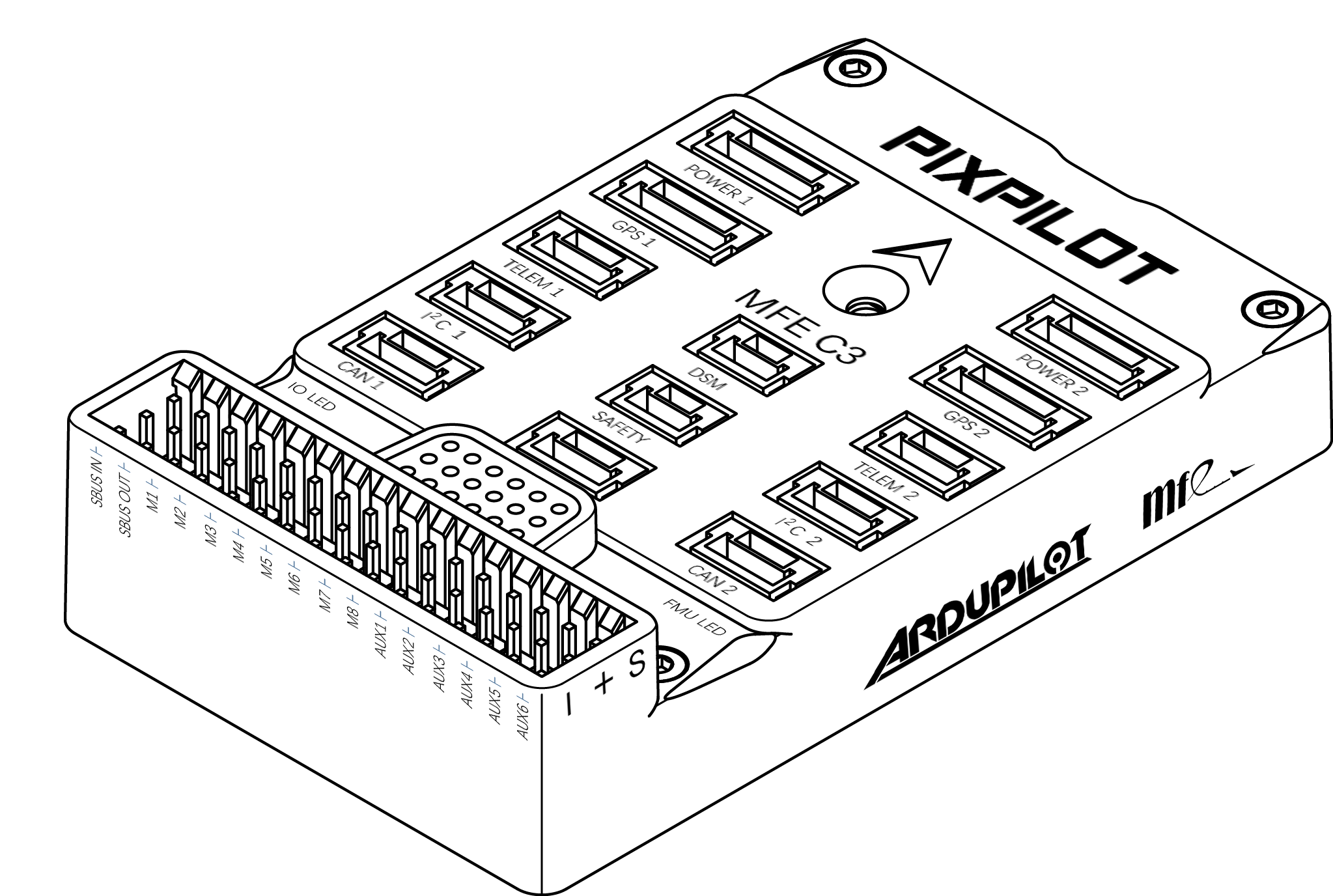
引脚¶
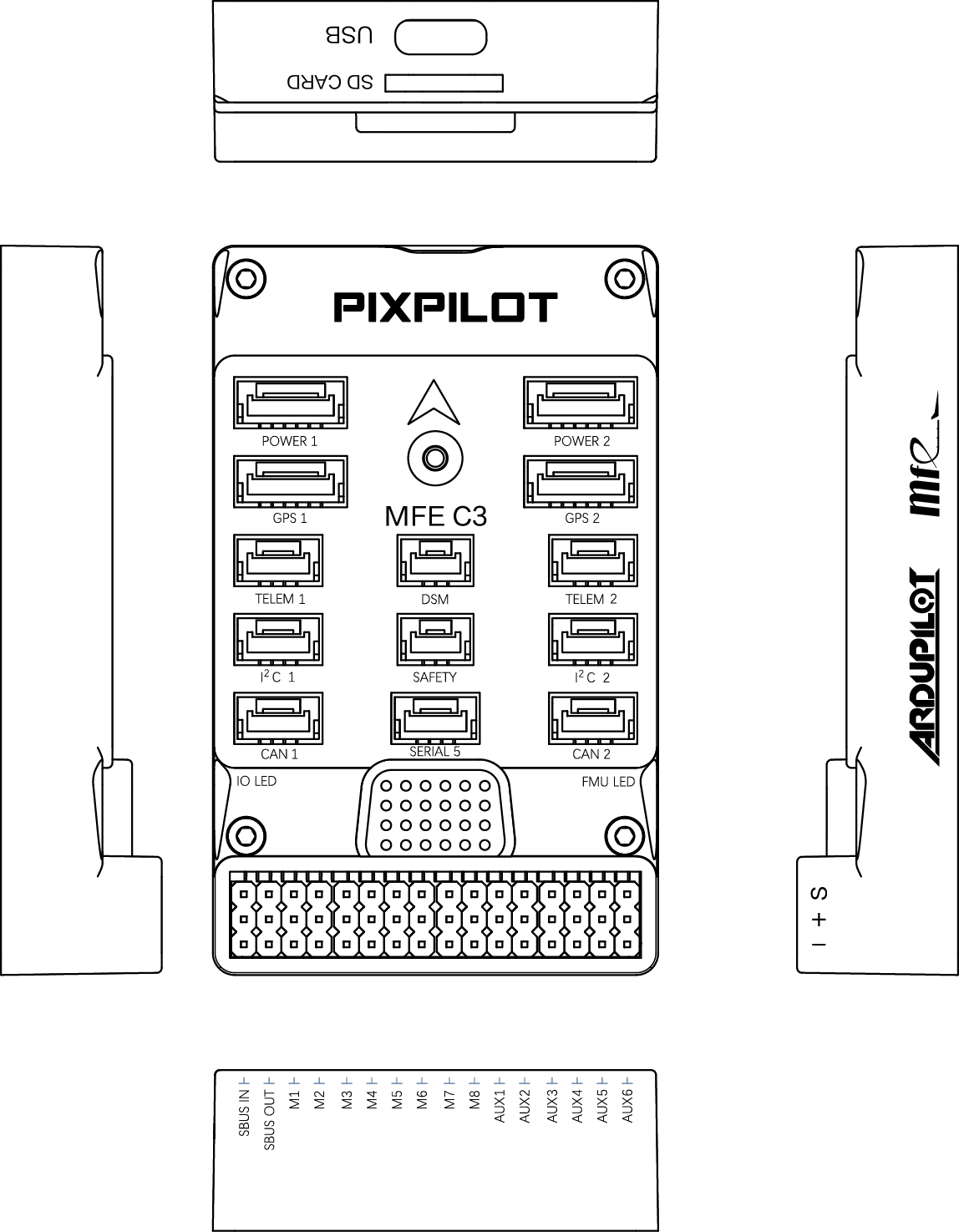
连接器针脚分配¶
TELEM1, TELEM2 端口¶
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 | VCC | +5V |
| 2 | TX (OUT) | +3.3V |
| 3 | RX (IN) | +3.3V |
| 4 | 接地 | 接地 |
I2C1、I2C2 端口¶
| 密码 | 信号 | 伏特 |
|---|---|---|
| 1 | VCC | +5V |
| 2 | SCL | +3.3V |
| 3 | SDA | +3.3V |
| 4 | 接地 | 接地 |
CAN1, CAN2 端口¶
| 密码 | 信号 | 伏特 |
|---|---|---|
| 1 | VCC | +5V |
| 2 | CAN_H | +12V |
| 3 | CAN_L | +12V |
| 4 | 接地 | 接地 |
安全端口¶
| 密码 | 信号 | 伏特 |
|---|---|---|
| 1 | VCC | +5V |
| 2 | 发光二极管 | +5V |
| 3 | 安全钥匙 | +5V |
GPS1/I2C1, GPS2/I2C2 端口¶
| 密码 | 信号 | 伏特 |
|---|---|---|
| 1 | VCC | +5V |
| 2 | 德克萨斯州 | +3.3V |
| 3 | RX | +3.3V |
| 4 | SCL | +3.3V |
| 5 | SDA | +3.3V |
| 6 | 接地 | 接地 |
串行 5 端口¶
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 | VCC | +5V |
| 2 | TX (OUT) | +3.3V |
| 3 | RX (IN) | +3.3V |
| 4 | 接地 | 接地 |
电源 1、电源 2 端口¶
| 密码 | 信号 | 伏特 |
|---|---|---|
| 1 | VCC | +5V |
| 2 | VCC | +5V |
| 3 | 当前 | +3.3V |
| 4 | 电压 | +3.3V |
| 5 | 接地 | 接地 |
| 6 | 接地 | 接地 |
DSM 端口¶
| 密码 | 信号 | 伏特 |
|---|---|---|
| 1 | VCC | +3.3V |
| 2 | RX | +3.3V |
| 3 | 接地 | 接地 |
RC 输入¶
SBus 输入引脚默认映射为定时器输入,可用于所有 ArduPilot 支持的接收器协议,但 CRSF/ELRS 和 SRXL2 除外,因为它们需要真正的 UART 连接。不过,FPort 以这种方式连接时,只能提供 RC 而不提供遥测。
要在 Fport、CRSF 和 SRXL2 接收器中使用 CRSF 和嵌入式遥测功能,接收器连接需要使用完整的 UART,如 SERIAL4 (UART8)。以下是使用 UART4 的设置。 serial4_protocol 应设置为 "23"。
FPort 需要 serial4_options 设置为 "15"。
CRSF 将要求 serial4_options 设置为 "0"。
SRXL2 需要 serial4_options 设置为 "4",仅连接 UART4 TX 引脚。
任何 UART 都可用于 ArduPilot 中的遥控系统连接,并与除 PPM 之外的所有协议兼容。请参见 无线电控制系统 了解详情。
PWM 输出¶
PixPilot-V3 支持多达 14 路 PWM 输出。前 8 个输出(标为 S1 至 S8)由专用的 STM32F103 IO 控制器控制。这 8 个输出支持所有 PWM 输出格式,但不支持 DShot。
其余 6 个输出(标为 AUX1 至 AUX6)为 "辅助 "输出。这些输出直接连接到 STM32F427,支持所有 PWM 协议和 DShot。
所有 14 个 PWM 输出端上排为接地,中排为 5V,下排为信号。
8 个主要 PWM 输出分为 3 组:
第 1 组中的 PWM 1 和 2
第 2 组 PWM 3 和 4
第 3 组中的 PWM 5、6、7 和 8
6 个辅助 PWM 输出分为 2 组:
第 1 组中的 PWM 1、2、3 和 4
第 2 组 PWM 5 和 6
同一组内的通道需要使用相同的输出率。如果一个组中的任何通道使用 DShot,那么该组中的所有通道都需要使用 DShot。
电池监控器设置¶
这些默认设置应该已经设置。但是,如果丢失或更改了这些设置:
使用这些参数设置启用电池电量监控器 :
BATT_MONITOR =4
然后重新启动。
BATT_VOLT_MULT 18.0
batt_amp_pervlt 24.0
batt2_volt_mult 18.0
batt2_amp_pervlt 24.0
DroneCAN 能力¶
有 2 个 CAN 端口,可连接两个独立的 CAN 总线输出。每个端口可连接多个 CAN 外围设备。
加载固件¶
电路板预装了与 ArduPilot 兼容的引导加载器,可通过任何与 ArduPilot 兼容的地面站加载 xxxxxx.apj 固件文件。
可以找到这些电路板的固件 这里 子文件夹中标有 "PixPilot-C3"。