分组数字 MPPT¶

"这款" Packet 数字 MPPT 太阳能控制器 是专为通过使用太阳能电池板帮助延长无人驾驶飞行器的续航时间而设计的。这款轻型控制器包括一个 DroneCAN/DroneCAN 接口,可对太阳能系统的性能进行实时监控。
通常情况下,该系统还会在电池输出端直接安装一个传统的双向功率监控器,以监控电池的充电或放电电流以及电池的总消耗电流。
购买地点¶
联系 PacketDigital 直接获取定价
规格¶
输入电压:12.5 伏至 50 伏
输出电压高达 50V
最大输入/输出电流: 5A
尺寸:60.96 毫米 x 53.34 毫米 x 17.4 毫米(长 x 宽 x 高)
重量:31 克
详情请见 packetdigital.com
(飞行)控制器连接¶
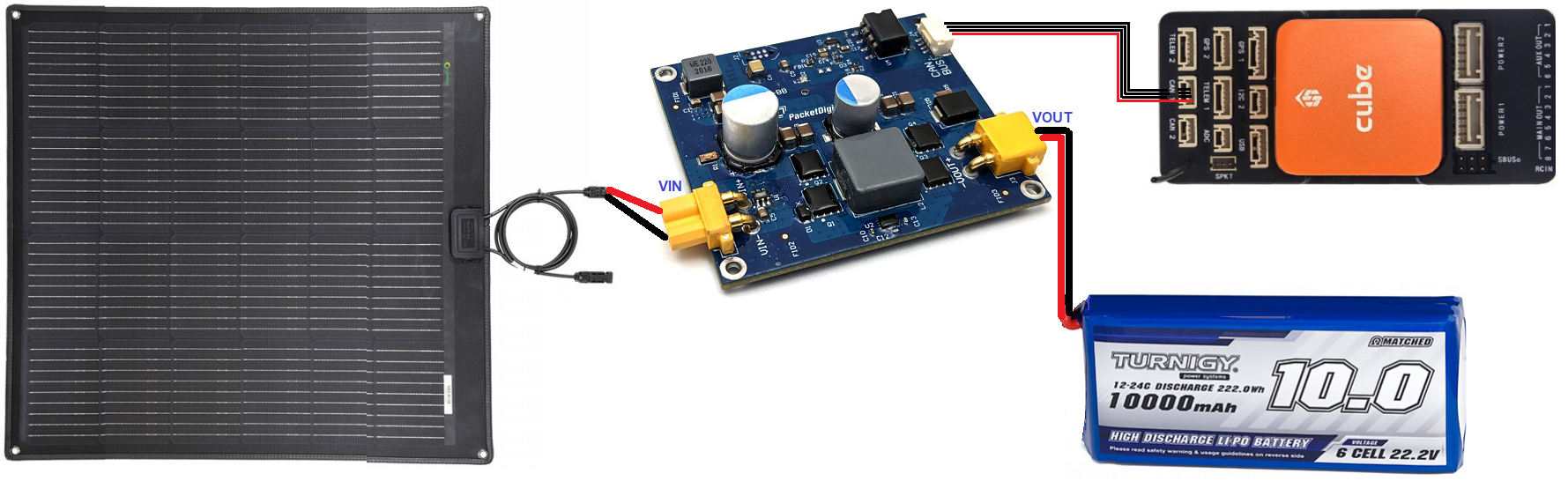
如上图所示,连接太阳能电池板、MPPT、蓄电池和(飞行)控制器。
一旦太阳能电池板提供的电压超过 12V,电路板的 LED 指示灯就会闪烁绿光。最初最简单的方法是将 4S 或 6S 电池连接到电路板的 VIN 端口。
配置¶
将地面站(如Mission Planner地面站)连接到(飞行)控制器,设置以下参数,然后重新启动(飞行)控制器
BATT_MONITOR = 8 (DroneCAN)
CAN_P1_DRIVER = 1 (DroneCAN)
BATT_OPTIONS 根据自动驾驶事件,提供了多个启用和禁用 MPPT 的选项。
备注
MPPT 可通过设置的 RC 通道开关手动开启或关闭。 RCx_OPTION = 172.
通过 "SLCAN "连接检查 MPPT 板的参数
打开Mission Planner地面站的设置 >>可选硬件 >>UAVCAN(DroneCAN)页面
从右上角选择(飞行)控制器 SLCAN 连接的 COM 端口(通常比 MAVLink COM 端口高一个)。
按下 "SLCan Mode CAN1 "按钮。表格应如下所示填写。如果还不行,请尝试切换到 "配置 "屏幕,通过 MAVLink 连接并设置 can_slcan_cport = 1.返回 SETUP >>可选硬件 >>UAVCAN(DroneCAN)页面,再次按下 "SLCan Mode CAN1 "按钮。
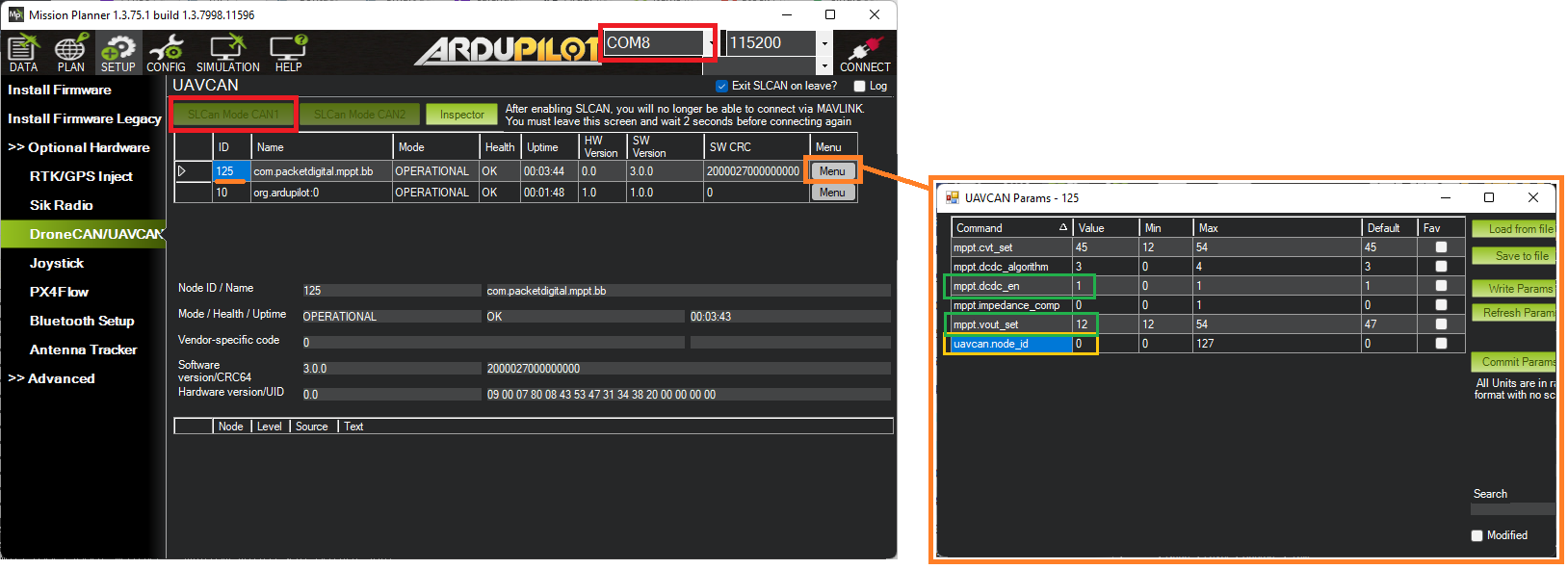
按 "菜单 "按钮查看或更改 MPPT 的某些设置
mppt.vout_set 配置 VOUT 引脚的最大电压。该电压应等于电池充满电后的电压。
mppt.dcdc_en 配置电路板的启动行为。如果为 "0",则 MPPT 在(飞行)控制器启动之前不会为电池充电。如果为 "1",MPPT 将始终尝试为电池充电
uavcan.node_id 通常应保持为 "0",以便(飞行)控制器动态分配 MPPT 的 DroneCAN 节点 ID,但如果使用了多个 DroneCAN 电池监控器或 MPPT,则可以手动将其设置为 0 至 127 之间的某个值(例如 "50"),然后设置 batt_serial_num 到相同数量
连接多个 MPPT¶
可将一块以上的 Packet Digital MPPT 电路板并联到同一个蓄电池(但不同的太阳能电池板)上,以增加提供的总电流。
允许(飞行)控制器连接所有 MPPT:
通过设置 BATTx_MONITOR = 8
使用Mission Planner地面站的 SETUP >>可选硬件 >>UAVCAN(DroneCAN)页面的 "菜单 "按钮手动配置每个 MPPT 的 uavcan.node_id
设置 BATTx_SERIAL_NUM 以与上面设置的 uavcan.node_ids 匹配。
您可以使用 "SUM (10) "功率监控器类型将所有 MPPT 电流相加。参见 Mission Planner地面站中的电源监控器/模块配置.