Currawong 速度 CAN 电子调速器¶

Currawong's 电子调速器的速度范围 为航空航天领域提供高度可靠的电机控制。
Velocity 系列电调专为驱动重型起重应用中的超大型电机而设计,功率超过 20kW
最多 18S (75V) 电池组
持续电流超过 300A
紧凑型设计
完全隔离的通信接口
在澳大利亚设计和制造
Velocity ESC 提供用于命令和遥测的 CAN 通信接口。此外,还支持传统的数字 PWM 接口。它们支持 PiccoloCAN 和 DroneCAN 协议。
此外,Velocity ESC 还提供可选的硬件互锁功能,以提高操作员的安全性。
购买地点¶
联系方式 库拉旺工程公司 了解购买详情。
PiccoloCAN 设置¶
备注
Velocity ESC 使用 PiccoloCAN 协议。该协议最初是为 Piccolo (飞行)控制器开发的,现在 ArduPilot 也支持该协议。
ArduPilot 配置¶
要使用 PiccoloCAN 与 Velocity ESC 通信,必须设置以下参数。
设置 can_d1_protocol = 4 (PiccoloCAN)
设置 CAN_P1_DRIVER = 1(第一个驱动程序),指定将电调连接至 CAN1 端口
设置
SERVOx_MIN= 1000 和SERVOx_MAX每个连接的电调 = 2000 (x与电调编号相对应),因此 ArduPilot 使用的输出范围与电调的输入范围相匹配设置
SERVOx_FUNCTION到每个电机通道(例如,33 - 40 表示电机 1 - 8)。这将在设置框架级别/类型时自动配置。如果未将电机通道分配给伺服输出,则不会向相关的电调发送指令。
默认情况下,所有配置的电机通道都用于向 Velocity ESC 发送控制指令。(飞行)控制器以 50Hz 的默认频率传输这些控制信息。可以通过以下方式修改这些参数
"这款" can_d1_pc_esc_bm 参数是一个位掩码,用于确定通过 CAN 传输哪些电调(电机)通道。
"这款" can_d1_pc_esc_rt 参数决定向所连接的 Velocity ESC 发送指令的速率(赫兹)。
电调配置¶
使用 Ardupilot 操作 Velocity ESC 时应使用以下配置设置:
将 Piccolo 节点 ID 设置为电调应监听的电机通道。请注意,这可能与配置的伺服输出编号不同。
启用
听 对于 广播 命令.
DroneCAN 设置¶
ArduPilot 配置¶
电调配置¶
要配置 ESC 从以下设备接收命令
SERVOx输出,设置dronecan.escIndex至x - 1例如SERVO5,设置escIndex= 4).请注意,这与 PiccoloCAN 不同,PiccoloCAN 是将电机通道分配给节点 id,而不是将伺服输出通道分配给节点 id。escIndex.可使用
dronecan.messagePeriods设置默认情况下,ESC 尊重自动舵发出的上膛信息。若要在收到命令时始终通过软件启用电调并忽略上膛信息,请设置
config.swInhibit= 1(假)。
默认情况下,Velocity ESC配置为使用动态节点id分配(DNA)。 dronecan.nodeId 应设置为 "0"(使用 DNA),除非 CAN 总线上的所有设备都配置为使用静态 ID。
使用 DroneCAN 协议获取设置时,仅显示 DroneCAN 特定设置。全套 Velocity ESC 设置可通过启用 显示高级 设置。
备注
建议使用 PiccoloCAN 和 CEquip 对电机进行配置,并对电调和电机进行验证,然后在载具集成过程中根据需要切换到 DroneCAN。
记录和报告¶
Velocity ESC 可向(飞行)控制器提供全面的遥测信息,这些信息记录在(飞行)控制器的机载日志中,并可在任何应用程序中查看。 兼容 ArduPilot 的日志查看器.这些信息包括
转速
电压
电调温度
电机电流
电机温度(与外部传感器一起使用时)
这些信息(电机温度除外)也可以通过地面站实时查看。如果使用Mission Planner地面站,请进入飞行数据屏幕的状态选项卡,查找(例如)esc1_rpm。
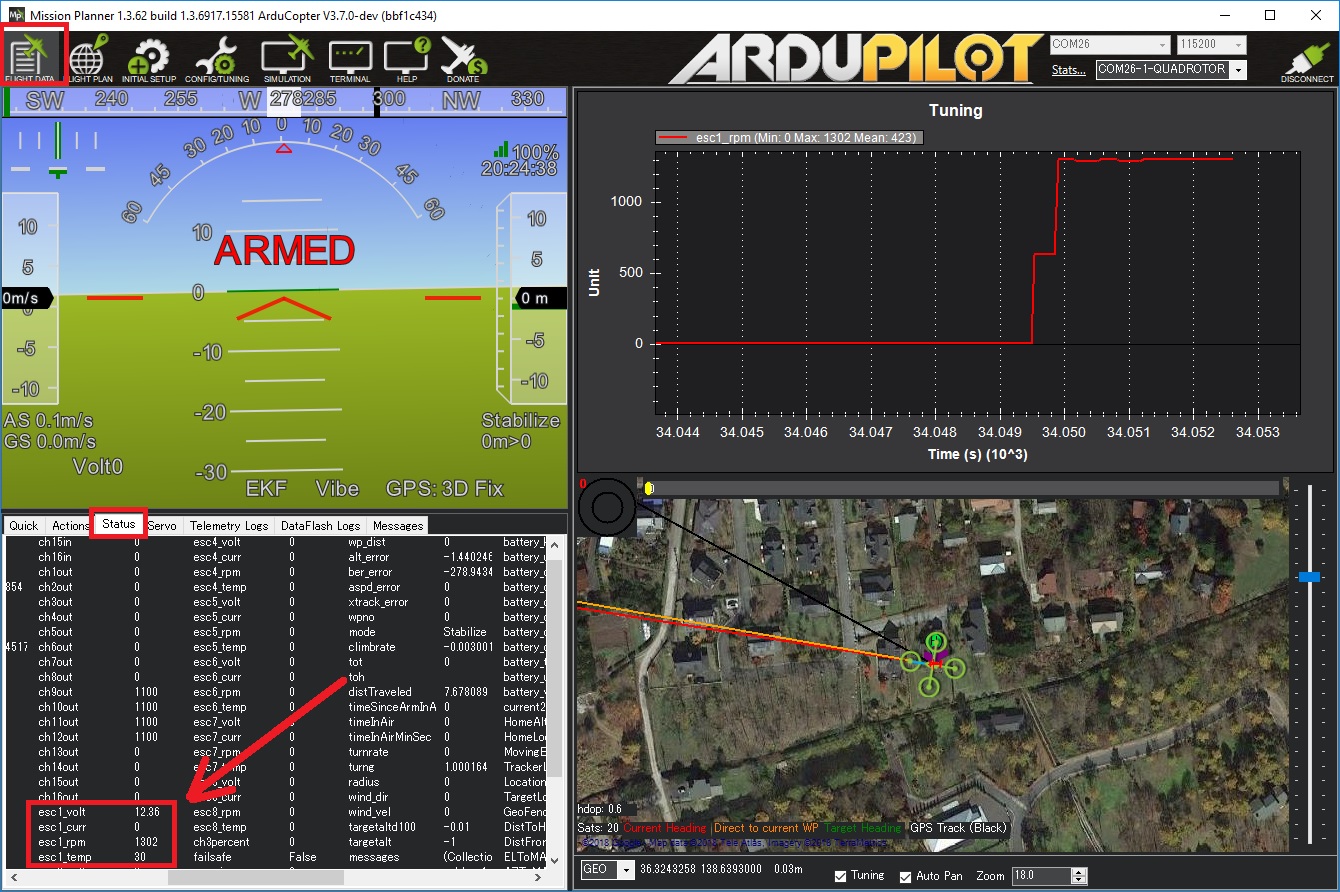
备注
向 GCS 发送电调数据需要使用 MAVLink2。请检查相应的 SERIALx_PROTOCOL 参数是否为 2(其中 "x "为用于遥测连接的串行端口号)。