返回发射¶
通过切换到 RTL 模式或 QRTL 模式,可以执行返回启动("主页 "或 "集合点")操作。在每种情况下,返回点都是一个关键概念。这被定义为最近的集结点,如果没有定义集结点,则为 "原点 "位置。参见 集结点 页面,了解更多有关集结点的信息。
RTL 模式有四种不同的行为选项,但基本上至少在大部分返回过程中使用固定翼飞行。其行为还取决于进入模式时飞行器距离返航点的距离,以及从哪种模式(固定翼或 VTOL/QAssist)进入。RTL 模式的行为由 Q_RTL_MODE 参数,并在下面的章节中进行解释。
默认情况下,QRTL 模式将以固定翼模式返回,并以 VTOL 模式着陆,其方式与通过以下选项选择的 RTL 模式相同 Q_RTL_MODE = 3,或使用 Q_OPTIONS 位(16),作为纯 VTOL 返回和着陆。
备注
在 VTOL 模式下,遥控故障安全只会导致切换到 QLAND、RTL 或 QRTL 模式,具体取决于 Q_OPTIONS 第 5 位(QRTL)和第 20 位(RTL)设置(第 20 位覆盖第 5 位),独立于 FS_SHORT_ACTN 或 FS_LONG_ACTN 设置为
RTL 模式¶
固定翼 RTL¶
Q_RTL_MODE = 0¶
返回固定翼和位置悬停
默认行为 (Q_RTL_MODE =0)的 RTL 模式与固定翼飞机相同。它将飞到最近的集结点(如果没有定义集结点,则飞到 HOME 点),并像固定翼飞机一样围绕该点盘旋。VTOL 发动机将不会被使用,除非飞机的飞行速度低于在 Q_ASSIST_SPEED.飞机盘旋的高度将是集结点的高度,或者说是飞行高度。 RTL_ALTITUDE 如果不使用集结点,则为高度。
如果在 VTOL 模式下选择了 RTL(由故障安全动作或飞行员选择),垂直起降飞行器将立即过渡到固定翼,并像在正常固定翼 RTL 模式下一样飞回。
混合 RTL¶
在 QuadPlane 中,RTL 的另一个选项是作为固定翼飞机飞行,直到接近返航点时才切换到 VTOL QRTL 模式,并在返航点垂直降落。要启用这种混合 RTL 行为,您需要设置 Q_RTL_MODE 参数为 1、2 或 3。
Q_RTL_MODE = 1¶
返回固定翼,切换到 QRTL,着陆
如果输入 RTL 时处于固定翼模式,则混合 RTL 固定翼部分的初始目标高度与固定翼 RTL 相同。您应设置集结点高度和 RTL_ALTITUDE 适当的参数,以确保飞机在安全高度飞行。
飞机从固定翼飞行切换到 VTOL 飞行时与返航点的距离可使用 RTL_RADIUS 参数,如果没有设置该参数,则 WP_LOITER_RAD 参数。然后,飞机将在接近返航点时减速,目标高度由以下参数设置 Q_RTL_ALT.
到达返航点后,飞机开始下降并着陆。
如果在 VTOL 模式下选择了 RTL(由故障安全动作或飞行员选择),垂直起降飞行器将立即过渡到固定翼模式,并像在固定翼模式下进入一样飞回。
Q_RTL_MODE = 2¶
固定翼返航,在高空盘旋,转入 qrtl,着陆
设置 Q_RTL_MODE 为 2 时,行为与上述类似,但飞行器会像正常的固定翼 RTL 一样返回,直到到达 q_fw_lnd_apr_rad然后在固定翼模式下位置悬停至 Q_RTL_ALT 高度,然后迎风而出,执行一个 QRTL 到原点。确保闲置部分的设置能够清除任何障碍物。
如果 RTL 在较大的 RTL_RADIUS 和 WP_LOITER_RAD以下 Q_RTL_ALT在 VTOL 模式或辅助固定翼飞行模式下,飞行器将立即朝以下方向飞行 Q_RTL_ALT 和着陆位置,然后着陆(即 QRTL 模式)。
如果在 VTOL 模式或辅助固定翼飞行中选择了 RTL(由故障安全动作或飞行员选择),超出这些半径时,Quadplane 将立即过渡到固定翼,并像在固定翼模式下输入时一样飞回。
Q_RTL_MODE = 3¶
固定翼返航,接近 Vtol 过渡点,空中制动,切换至 Qrtl,着陆
设置 Q_RTL_MODE 为 3 时,行为类似于正常 QRTL.载具将进入 "接近 "阶段,并在 "接近 "时返回。 RTL_ALTITUDE 并在计算好的距离内,开始向以下方向下降 Q_RTL_ALT.在接近着陆位置时,ArduPilot 会在非尾翼状态下启动 "空气制动 "阶段,以减慢飞行器速度,一旦速度减慢,就会进入完全 VTOL 模式,并执行 VTOL 着陆。默认情况下 QRTL 除非 Q_OPTIONS 位 16 设置为防止上述混合操作。
实际上,这就为任何 RTL 操作启用了 QRTL 模式:故障安全操作、模式切换到 QRTL 或完成任务(除非最后一个任务项目阻止 RTL)。
备注
所有任务的 VTOL_LANDING 也默认使用该模式,除非 Q_OPTIONS 位 16 设置为禁用。
这种固定翼 "方式 "允许使用 VTOL 降落,而无需设置进场航点来降低高度,并以 VTOL 模式接近着陆点。如果第 16 位被禁用,飞行器将在执行该任务项目时立即过渡到 VTOL 模式,或在模式变为 VTOL 模式时立即过渡到 VTOL 模式。 QRTL在进行 QLAND 之前,先以 VTOL 方式导航到着陆点。这意味着,如果任务中禁用了 FW 进场模式,您应该非常接近着陆点,因为它将以 VTOL 飞行方式前往着陆点。
下图详细说明了默认设置为第 16 位(即未启用)时的进场和着陆阶段:
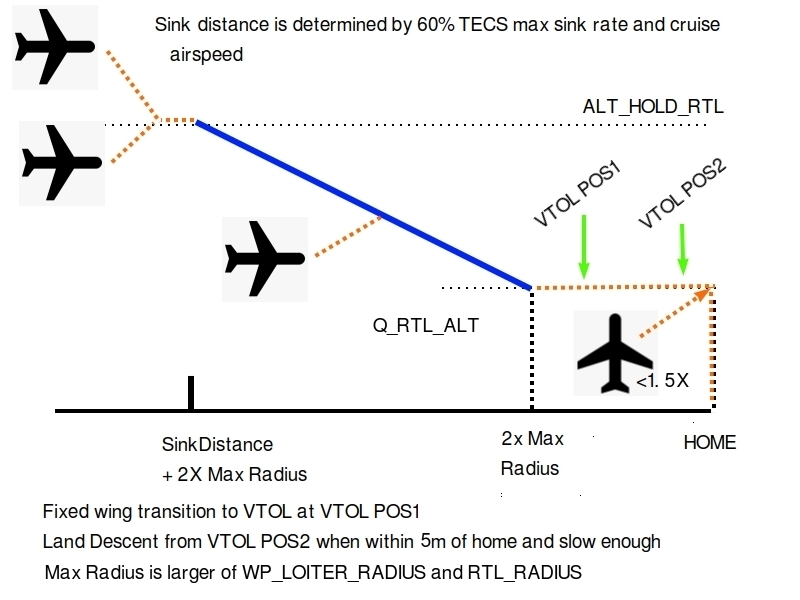
该方法的各个阶段是
如果进入 VTOL 模式,载具将爬升到 Q_RTL_ALT如果低于此值,则过渡到固定翼,并开始正常的固定翼 RTL
在固定翼模式下,当飞行距离超过以下两者中较大者的 2 倍时 RTL_RADIUS 或 WP_LOITER_RADS (MAXRAD) 加上计算得出的从 RTL_ALTITUDE 至 Q_RTL_ALT,飞机将尝试爬升或下降到 RTL_ALTITUDE.如果在该范围内,它将尝试爬升/下降到线性下降斜坡,遇到该斜坡后继续下降,如上图所示。
如果启动距离超过 2 倍 "最大飞行高度",但比上述距离更近,则在 2 倍 "最大飞行高度 "时将继续以固定翼模式飞行,速度为 Q_RTL_ALT.
当飞行器到达距离着陆点在 VTOL 停止距离之内的位置时(在 VTOL 减速参数限制和当前速度下),飞行器将过渡到 VTOL 模式,并发送 "VTOL 位置 1 "的信息,然后继续向着陆点移动。如果飞行器不是尾随者,在 VTOL 过渡之前可能会出现 "空中制动 "阶段,使 VTOL 发动机旋转以产生额外的制动。
一旦 QuadPlane 距离着陆点 5 米以内,且移动速度小于 2 米/秒,它将发送一条 GCS 信息,宣布处于 "VTOL Position2 "状态,并最终定位在着陆点上空,开始着陆下降,GCS 信息也将对此进行提示
如果输入的进近小于 1.5 倍 MAXRAD,无论从固定翼模式还是 vtol 模式输入,都将立即转入 VTOL Position1 状态,并向着着陆点移动,试图获得 Q_RTL_ALT 因为它是这样做的。
如果在 VTOL 模式下,飞行高度大于 1.5X MAXRAD,飞机将转换为固定翼,并尝试导航至原点,执行进场。向着着陆点的爬升和转弯甚至会在低空进行,就像普通的非垂直起降固定翼飞行器 RTL 一样,因此 飞行选项 第 4 位为 "RTL 转弯前爬升 "和/或 Q_OPTIONS 电平转换 "的第 0 位可能值得考虑。
QRTL 模式¶
默认情况下,切换到 QRTL 模式将与 Q_RTL_MODE = 3,如上。不过,如果您想把返航发射当作纯粹的 VTOL 飞行器来做(就像多旋翼飞行器那样),那么您可以使用 QRTL 飞行模式,但 Q_OPTIONS 设置第 16 位是为了禁用 QRTL 的默认行为(就像上文描述的混合 RTL 一样,使用 Q_RTL_MODE = 3).如果尚未进入 VTOL 状态,飞行器将过渡到 VTOL 飞行,然后以 Q_WP_SPEED 速度飞向返航点,高度为 Q_RTL_ALT.
到达返航点后,飞机将开始垂直降落到地面。初始下降速度由 Q_WP_SPEED_DN.一旦飞机飞行高度达到 q_land_final_alt 下降速度将变为 q_land_final_spd 最后着陆阶段。
在最后着陆阶段,飞机将在 VTOL 发动机节流阀低于最小临界值 5 秒钟时检测着陆情况。当出现这种情况时,飞机将解除警报,VTOL 发动机也将停止。