尾随者 VTOL 调整¶
调整尾翼与调整普通 SLT(分离式升力推力)或倾斜旋翼四旋翼飞机不同。这些四旋翼飞行器的调校与多旋翼飞行器非常相似,因为 VTOL 的姿态是由所有轴上的电机速度/推力控制的(偏航倾斜旋翼四旋翼飞行器的 YAW 除外)。
在大多数尾翼飞行器中,VTOL 的姿态通常由固定翼控制面组合控制,在某些配置中,俯仰和偏航由电机倾斜控制。滚转通常由电机/速度推力控制,可以像多旋翼飞行器一样进行调整,甚至是自动调整,并遵循正常的飞行轨迹。 垂直起降 为该轴飞行稳定调整。除下文所述外,有关飞行稳定调整设置和相位的大部分说明与 Tailsitters 相同:
音高和偏航飞行稳定调整¶
至于俯仰和偏航,则由固定翼控制面提供控制,根据尾翼的类型,有时还与电机倾斜相结合。由于 PID 环路的 FF(前馈)分量是主要控制路径,P 和 D PID 项提供干扰修正,因此这些轴需要采用与普通固定翼手动调整更为类似的调整方法。调整过程如下,从默认的 PID 值开始:
首先,按照正常操作步骤 1 - 4 进行操作。 垂直起降飞行稳定调整过程设置.
通常情况下,使用默认 PID,飞行器已经足够稳定,可以在 QSTABILIZE 或 QHOVER 中进行首次悬停测试。在启用日志记录的情况下进行短时间悬停飞行,使 谐波带阻滤波器 可以进行设置。使用基于节气门的谐波带阻滤波器进行良好的调试时,必须尽可能消除发动机噪音。
设置好槽口滤波器后,再做一次悬停飞行,但要短暂地向两个方向做短而急促的俯仰杆动作。不要危及飞行器,但要试着向前后方向做几次短促的全摇杆动作。对偏航也做同样的动作,但您应该能够在每个方向上保持全速偏航杆一秒钟左右,在方向逆转之间返回空档一秒钟。
下载 数据闪存日志 进行分析。为了确定 Q_A_RAT_PIT_FF 和 Q_A_RAT_YAW_FF 术语,使用日志分析器,如 https://plot.ardupilot.org 并使用 "添加表达式 "按钮在同一比例尺上设置以下绘图:
PIQP.FF+PIQP.P+PIQP.D x * (PIQP.Act) , 其中 X 是 0.2 至 启动
然后调整上面的 X 值,直到两个图的大小基本相等。这将是 Q_A_RAT_PIT_FF 术语。设置 Q_A_RAT_PIT_I 项相等。
现在对 YAW 轴进行同样的操作:
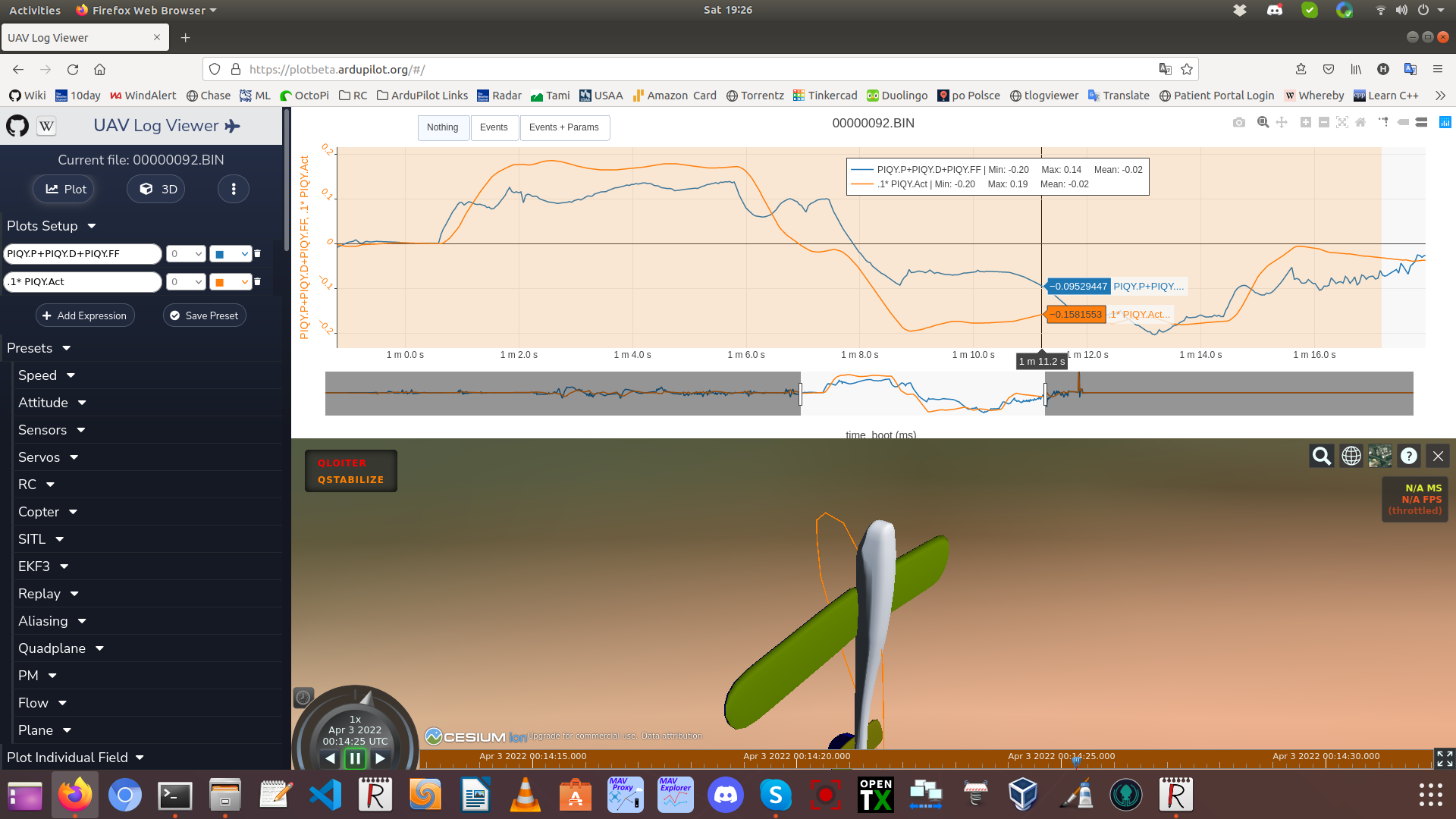
piqy.ff+piqy.p+piqy.d x * (PIQY.Act) , 其中 X 是 0.2 至 启动
下图是调整 X 值直到两条曲线的振幅相同(X = 0.1)的图像。然后将其设置为 Q_A_RAT_YAW_FF 和 Q_A_RAT_YAW_I 价值观
现在您可以再次悬停,开始增加 Q_A_RAT_PIT_D 项,或者使用 基于发射机的飞行稳定调整直到振荡为止,然后减小到该值的 1/2 到 1/3。
然后增加 Q_A_RAT_PIT_P 直到振荡为止,然后将其减小到该值的 1/2 到 1/3。
对 YAW 轴进行同样的操作。
滚动飞行稳定调整¶
这样就可以对俯仰和偏航进行合理调整。滚轴的调整方法与 STEP 10 中的滚轴调整方法相同。 垂直起降.如果仅限于滚动轴,甚至可以使用 QAUTOTUNE 对滚动轴进行自动调整。 q_autotune_axes.
使用快速调整 LUA 小程序¶
对于使用(飞行)控制器的系统,其内存足以运行 LUA 脚本在基于 F7 和 H7 等控制器的非尾随器类 QuadPlanes 中,这一过程已通过一个 LUA Applet 自动完成,这些控制器在调整中不使用 FF PID 项。不过,它仍可用于这些类型轴上的尾随器。
对于每个以 FF 为主导的轴,按上述步骤确定 FF 项,并将 I 项设置为与之相等。然后就可以运行小程序,因为如果 FF 项不为零,在运行过程中就不会改变 I 项。
冗余推杆的 VTOL 增益缩放¶
有些尾翼有特定轴的冗余致动器。矢量推力尾翼可能既有用于偏航的倾斜电机,也有升降舵。除旋翼飞行器式发动机外,旋翼飞行器尾翼还可能具有可产生俯仰或偏航的固定翼控制面。在某些情况下,希望这些固定翼控制面在 VTOL 中提供比发动机更多的姿态控制,从而降低控制所需的推力/油门水平。
通过以下参数可以调整固定翼控制面对每个轴的控制程度。数值越大,控制面的增益越大,这将使整个系统获得更大的增益,从而提高飞行速度。 Q_A_RAT_ 可能需要降低俯仰和偏航 PID 增益。例如,为了降低电机的响应速度,可以将 PID P/D/I/FF 速率增益减半,并使用两个控制面比例因子。这将导致控制面的响应与之前一样,但电机输出减半。
默认值为 1,与过去相比没有任何行为变化。这些增益仅在 VTOL 模式或 Q 辅助模式下有效。
q_tailsit_vt_p_p 从 Pitch PID 输出到控制面的刻度
q_tailsit_vt_r_p 从滚动 PID 输出到控制面的刻度
q_tailsit_vt_y_p 从偏航 PID 输出到控制面的刻度