飞行稳定调整过程说明¶
为飞机调试做好准备¶
应根据飞机规格正确设置以下参数。
步骤 1:电池和曝光设置¶
确保 VTOL 电机的推力曲线尽可能呈线性非常重要。线性推力曲线意味着电机产生的实际推力变化与 ArduPilot 要求的推力成正比。如果您的推力曲线严重非线性,那么您将永远无法获得良好的调试效果,在某些情况下,调试效果可能会很差,以至于飞行器完全不稳定并坠毁。
造成非线性推力曲线的常见原因有三种。
当油门加大或正转电机启动时,电压会下垂。这在垂直起降固定翼飞行器中非常常见
电调所用 PWM 范围内的端点设置不正确(见下文 "电机设置")。
螺旋桨、电调和电机组合产生的推力存在非线性
首先设置电压范围,以应对电压下陷。
Q_M_BAT_IDX:用于 VTOL 电源系统电压测量的电池索引。0 表示第一块电池,1 表示第二块电池等。
q_m_bat_volt_max:4.2v x 锂电池数量
q_m_bat_volt_min:3.3v x 锂电池数量
Q_M_OPTIONS = 0(默认值)。默认情况下,在上述和飞行稳定调整计算中使用下陷补偿电压。可将其设置为 1,以使用原始电压代替矢量补偿电压,这可能会改善轻型载具的飞行稳定调整结果。
请注意 Q_M_BAT_IDX 需要为 VTOL 发动机选择正确的电池。如果正转电机和 VTOL 电机使用不同的电池,请确保使用正确的电池。
接下来设置推力指数。如果您正在设置专业飞行器,则应投资购买一个推力支架,以便在改变油门时准确测量电机/ESC/螺旋桨组合的真实推力。然后,您将根据端点(由下面的电机设置给出)调整 expo 值,使端点之间的推力尽可能线性。不要相信制造商提供的推力曲线数据,因为它们经常不准确。请参见 电机推力缩放 了解推力缩放的详细信息。
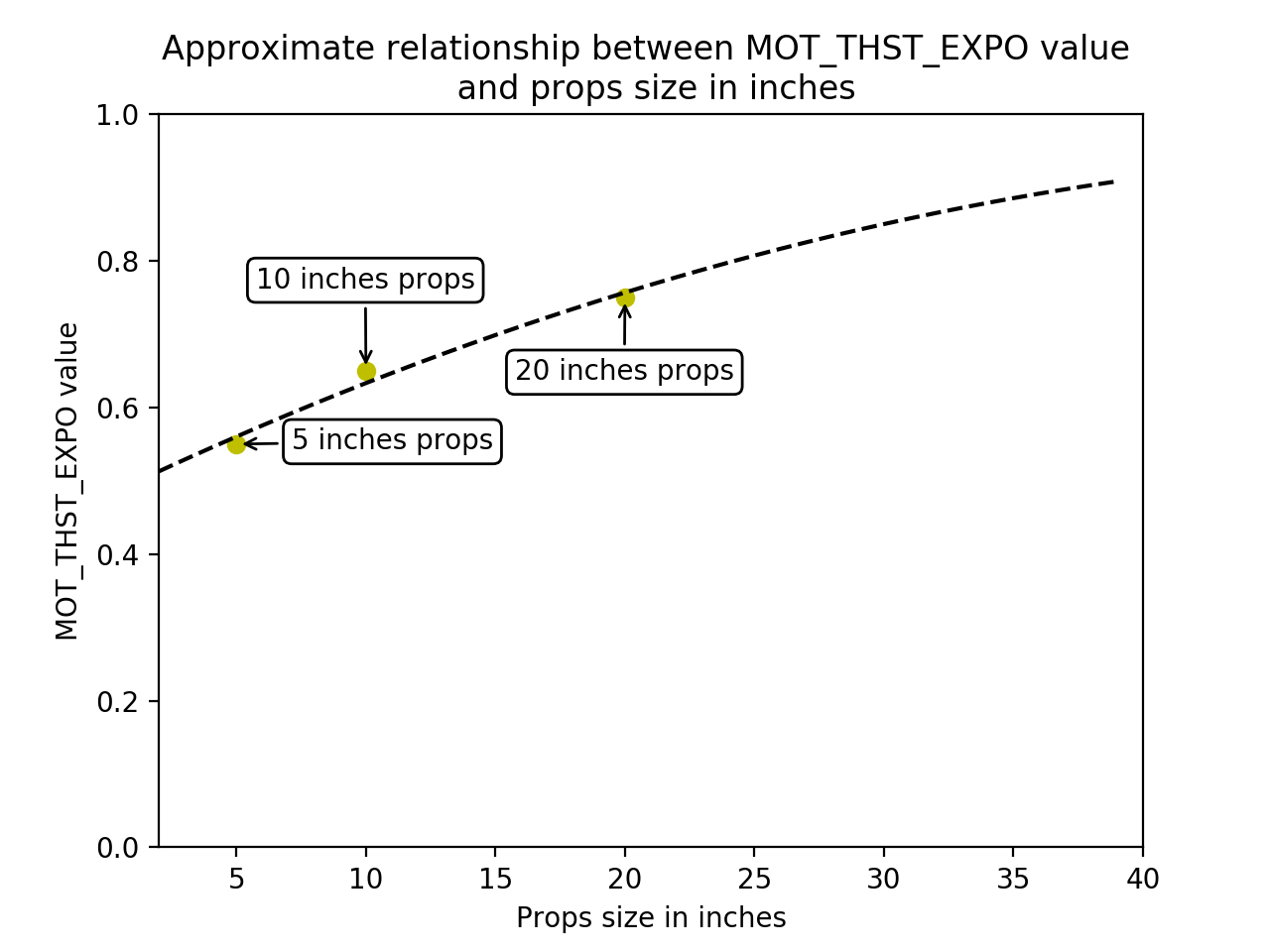
如果您正在安装业余爱好级载具,那么您可以使用下图估算出正确的 Q_M_THST_EXPO 飞机的价值。
Q_M_THST_EXPO:5 英寸螺旋桨为 0.55,10 英寸螺旋桨为 0.65,20 英寸螺旋桨为 0.75。
步骤 2:设置电机¶
电机参数定义了发送给电调的 PWM 输出范围。这对于确保飞行中使用的整个油门值范围都在推进系统的线性范围内至关重要。
对于基于 PWM 的标准电子调速器,应调整 Q_M_PWM_MIN 直到低于使电机开始转动的最小值约 20 微秒。如果您使用的是数字电机输出(如 DShot),则没有必要这样做,应使用默认值 1000。
然后调整 Q_M_PWM_MAX 到电调停止产生更大推力的值。请注意,该值通常略低于默认的最大值 2000。要找到这个值,您应该在去掉螺旋桨的情况下进行测试,并使用 GCS 的电机测试功能找到能使电机产生最大转速的最低 PWM 值。通过聆听不同 PWM 值下发出的声音,或者使用转速表,您应该可以知道电机在哪个 PWM 值下停止产生更大的推力。
"这款" Q_M_SPIN_MIN 和 Q_M_SPIN_MAX 值用于选择电机线性输出的子范围。对于业余爱好者来说,默认值通常很好,但对于专业载具来说,您应该使用推力台架数据来确定正确的范围,以便在应用扩展后产生线性推力。
Q_M_PWM_MAX:查看电调手册,了解固定范围或 2000us
Q_M_PWM_MIN:查看电调手册,了解固定范围或 1000us
Q_M_SPIN_MAX:0.95
Q_M_THST_HOVER:0.25,或低于预期悬停推力百分比(低为安全值)
步骤 3:PID 控制器初始设置¶
以下设置旨在使您的 PID 控制器加速度和滤波器设置达到适合您载具的大致范围。这些参数对调整过程至关重要。
ins_accel_filter:10Hz 至 20Hz
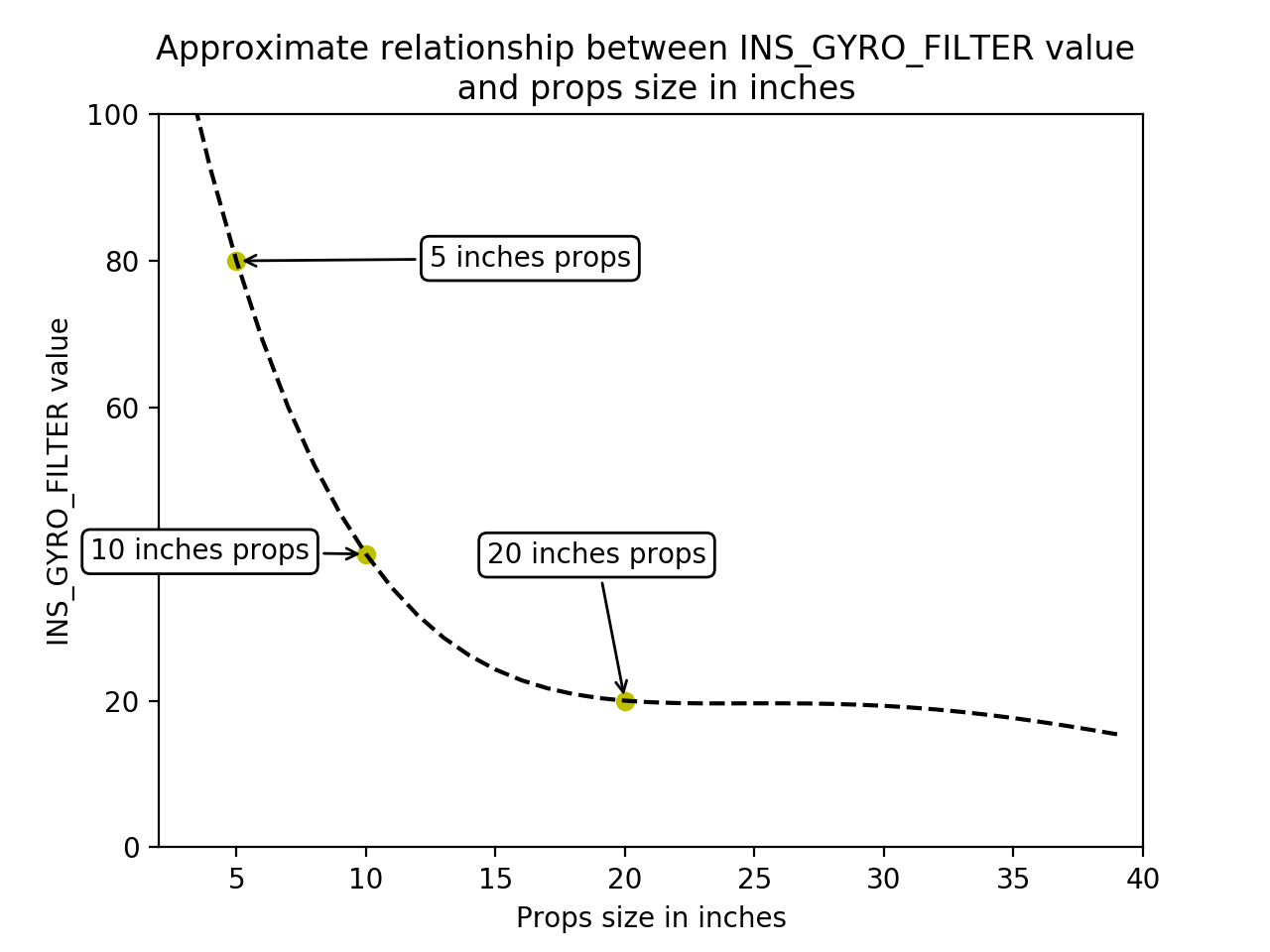
ins_gyro_filter:5 英寸螺旋桨 80 赫兹,10 英寸螺旋桨 40 赫兹,20 英寸螺旋桨 20 赫兹
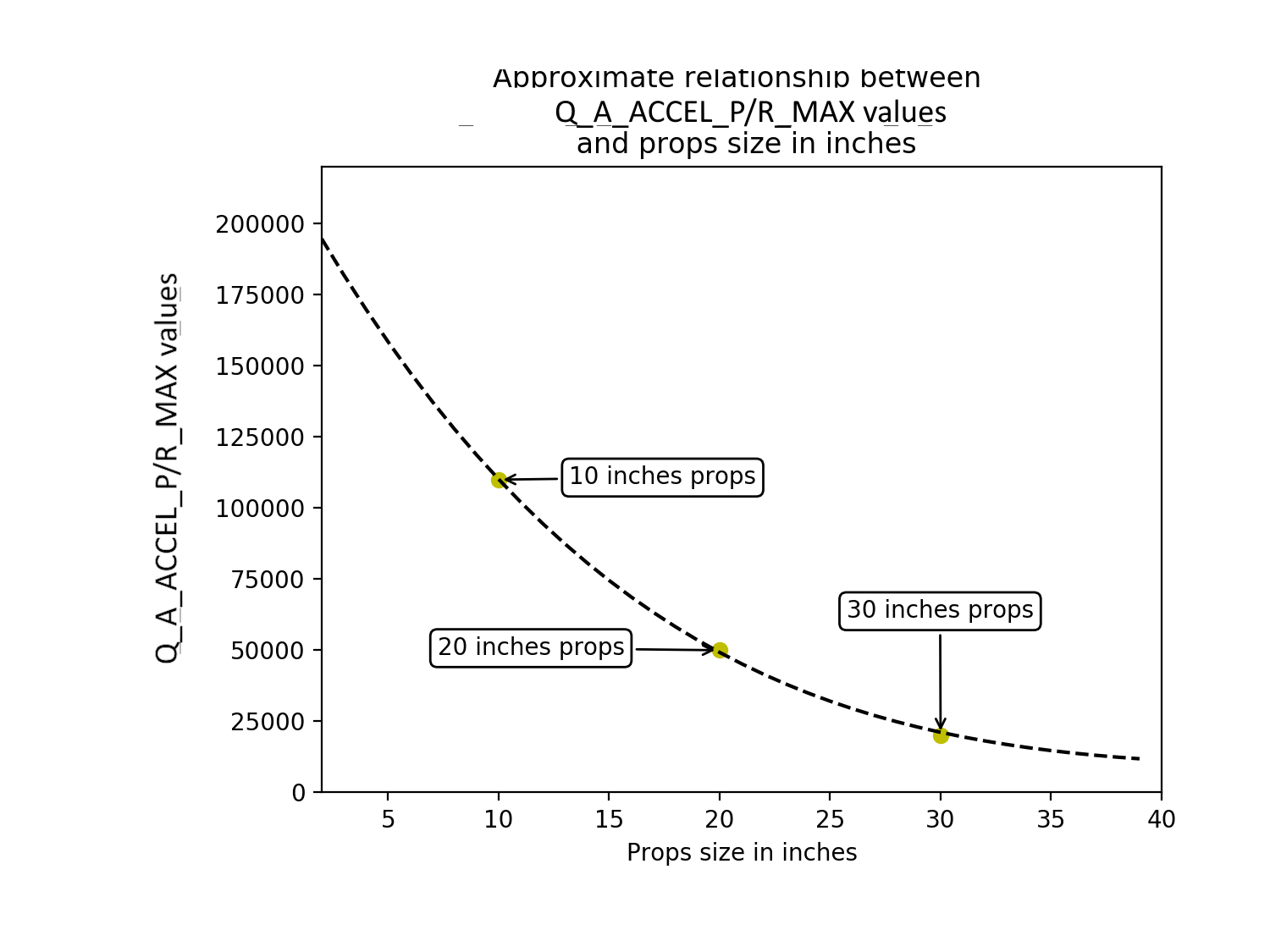
q_a_accel_p_max:10 英寸螺旋桨 110000,20 英寸螺旋桨 50000,30 英寸螺旋桨 20000
q_a_accel_r_max:10 英寸螺旋桨 110000,20 英寸螺旋桨 50000,30 英寸螺旋桨 20000
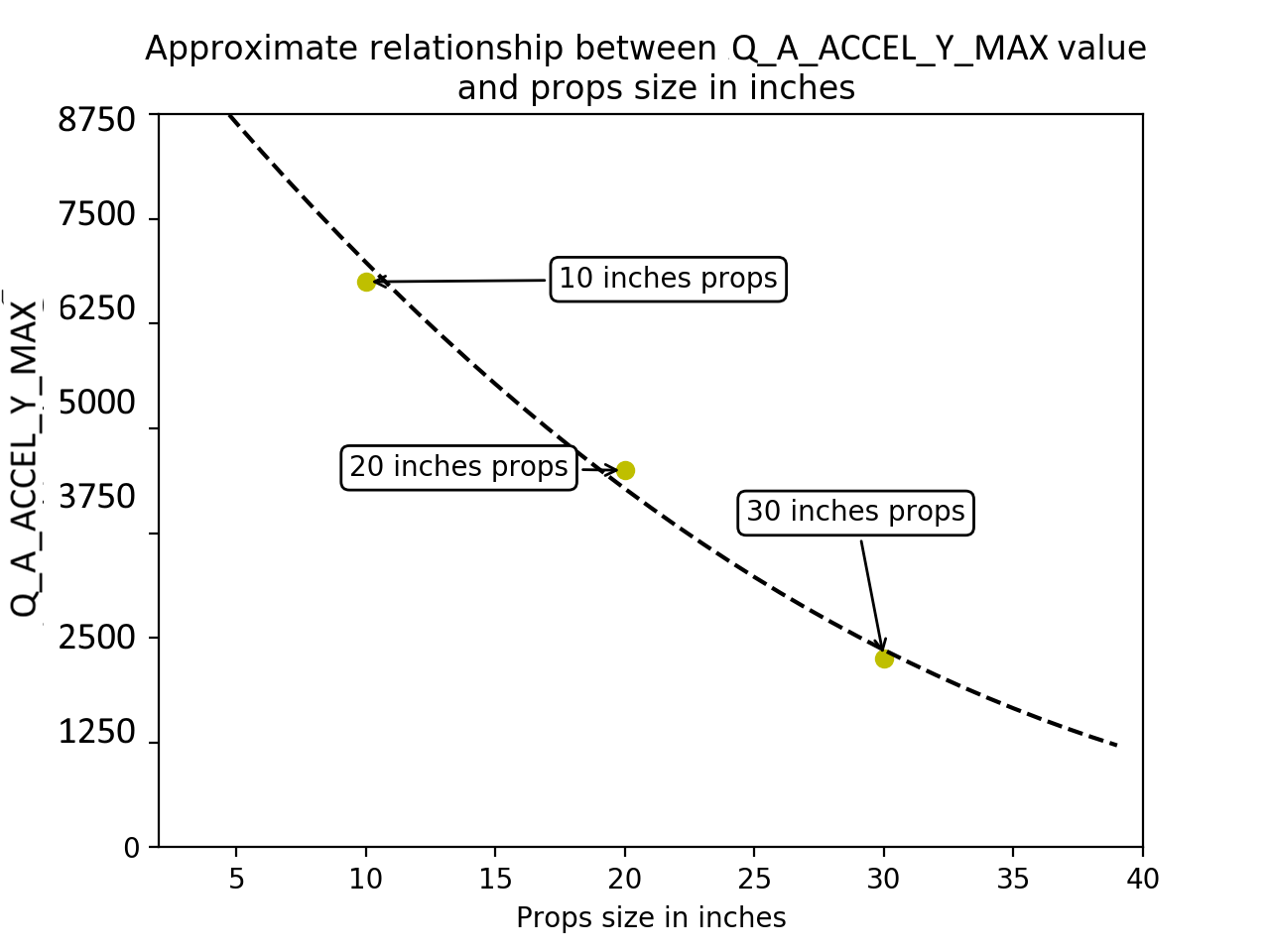
q_a_accel_y_max:6 英寸螺旋桨 7500,10 英寸螺旋桨 6750,20 英寸螺旋桨 4500,30 英寸螺旋桨 2250
Q_A_RAT_YAW_P:0.5 x q_a_accel_y_max / 4500
q_a_rat_yaw_flte:0 适用于定向偏航;2.5 适用于其他类型的垂直起降飞行器
飞机的初始调试应 在飞机最灵活的配置中.这通常意味着飞机在电池充满电的情况下将达到最小起飞重量。
步骤 4:飞行员为首次飞行做准备¶
未经调试的 VTOL 飞机首次起飞是飞机生命中最危险的几秒钟。此时飞机可能非常不稳定,导致动力突然增加,进而导致飞机跳入空中,或者飞机调试得很差,以至于在飞机升空后无法对其进行充分控制。飞行员在调试飞行时应格外小心,避免出现可能导致受伤或损坏的情况。
在早期调试过程中,飞行员可以采取一些措施将风险降至最低:
飞行员应进行发动机编号和方向检查(见 使用Mission Planner地面站检查电机编号 电机测试).应注意确保选择了正确的框架类型。机架类型不正确可能导致偏航旋转过快或完全失控。注意螺旋桨旋转所需的输出百分比,并确保
Q_M_SPIN_ARM 设置得足够高,以便电机干净利落地旋转。
Q_M_SPIN_MIN 设置得足够高,以便发动机以最小推力旋转。
进行重大调整后的所有飞行都应在 QSTABILIZE 模式下进行。如果姿态控制装置不稳定,QSTABIILIZE 可为飞行员提供更强的飞机控制能力。
在飞行中测试高度控制器之前,飞行员不应在 QHOVER 模式下起飞。具体做法是在 QSTABILIZE 模式下起飞,然后切换到 QHOVER 模式。尽管 QHOVER 很少会出现问题,除非飞机的悬停油门非常低。
在初始飞行中,飞行员应确保设置了这些参数:
q_a_thr_mix_man 至 0.1
Q_M_THST_HOVER 到 0.25(或低于预期的悬停节流阀)
飞行稳定调整过程¶
步骤 5:首次飞行¶
对于任何垂直起降固定翼飞行器来说,第一次起飞都是最危险的时刻。必须小心谨慎,确保飞机在飞行的最初几秒钟内不会被摧毁,也不会有人受伤。
确保所有观众保持安全距离.
确保飞行员处于安全距离和位置.
飞行员应重新学习解除飞机上膛的方法(使用 辅助功能 可能对电机联锁或上膛/撤膛有帮助)。
通过这次飞行,可以将飞机设置为 "可调整飞行 "状态。
确保飞机处于 QSTABILIZE 模式
上膛飞机
立即解除飞机上膛,确保解除程序正确无误
上膛飞机
缓慢加大油门,寻找摆动迹象。(长起落架或灵活的起落架可能会导致一些起落架摆动,这种摆动只有在飞机离开地面后才会消失)。
一旦飞机升离地面,立即尽可能轻地将飞机放回地面
解除飞机上膛
评估所观察到的情况,以决定是否需要调整调整参数,或者是否可以再次安全起飞
上膛并加大油门以启动起飞
在大约 1 米的高度悬停,对横滚和俯仰进行小幅度(5 度)控制输入
如果发现任何摆动,立即降落
下一节将介绍如何消除振荡。
步骤 6:飞机初始调试¶
对 QuadPlane 进行飞行稳定调整时,首要任务是建立一个无振荡的稳定飞行稳定调整,以便用于进一步测试。
在 QSTABILIZE 中上膛飞机
慢慢加大油门,直到飞机离开地面
如果飞机开始摆动,应立即放弃起飞和/或降落,并且:
将以下所有参数降低 50
这个过程不断重复,直到飞机可以悬停,而视觉和听觉都无法检测到振荡。
如果飞机的起落架很长或很灵活,那么您可能需要在地面共振停止之前离开地面。
请注意,在这种状态下,飞机对大量控制输入和干扰的反应可能会非常缓慢。飞行员应格外小心,尽量减少对飞机的操纵杆输入,以避免坠机的可能性。
步骤 7:测试 QHOVER¶
通过该测试可以测试高度控制器,确保飞机的稳定性。
检查 q_m_hover_learn 这将允许控制器在飞行时自行学习正确的悬停值。
备注
只有在飞行员或(飞行)控制器(即 QLOITER 等)未指挥飞机姿态从中立位置超过 5 度并持续两秒钟时,才会 "学习 "悬停节流阀值。
在 QSTABILIZE 模式下起飞,将高度增至 5 米。切换到 QHOVER,并准备切换回 QSTABILIZE。如果飞机以很低的悬停节流阀值悬停,您可能会听到发动机有相当快的振荡。确保飞机悬停至少 30 秒,让悬停节流阀参数收敛到正确值。降落并解除飞机上膛。
在地面上设置这些参数,并最好解除这些参数(有信心的飞行员可以在飞行中通过 GCS 设置这些参数):
如果 QHOVER 中的四维平面开始上下移动,垂直位置和速度控制器可能需要减少 50%。这些值为 Q_P_POSZ_P 和 Q_P_VELZ_P.
备注
如果 Q_M_THST_HOVER 应为 ~0.3-0.6。较高的数值表明推力不足,原因可能是发动机系统设计、机身或机翼阻碍螺旋桨气流或偏航偏差过大(见下一节)。
步骤 8:偏航/航向¶
垂直起降固定翼飞行器的一个常见问题是,过多的 VTOL 动力被用于保持偏航,而不是提供升力。造成这种情况的原因有
VTOL 发动机的微小偏差
当推力作用时,机架扭曲(通常由机翼扭曲引起
机翼阻碍螺旋桨气流 TVBS 型尾随者 使电机倾斜偏航的效果大打折扣。这也会导致正常推力下降,使悬停和 VTOL 爬升变得困难。
如果需要过多的动力来维持偏航,那么飞机可能会在过渡期间失去偏航控制,或失去滚转和俯仰稳定性。最常见的症状是悬停油门点过高,甚至在油门杆位置过高时无法上升到悬停状态。对于较大型的 QuadPlanes,通常需要故意将发动机倾斜几度以增加偏航能力。
备注
X 帧类型 (Q_FRAME_TYPE = 1),电机应向外倾斜。对于 H 型框架 (Q_FRAME_TYPE = 3)应向内倾斜。
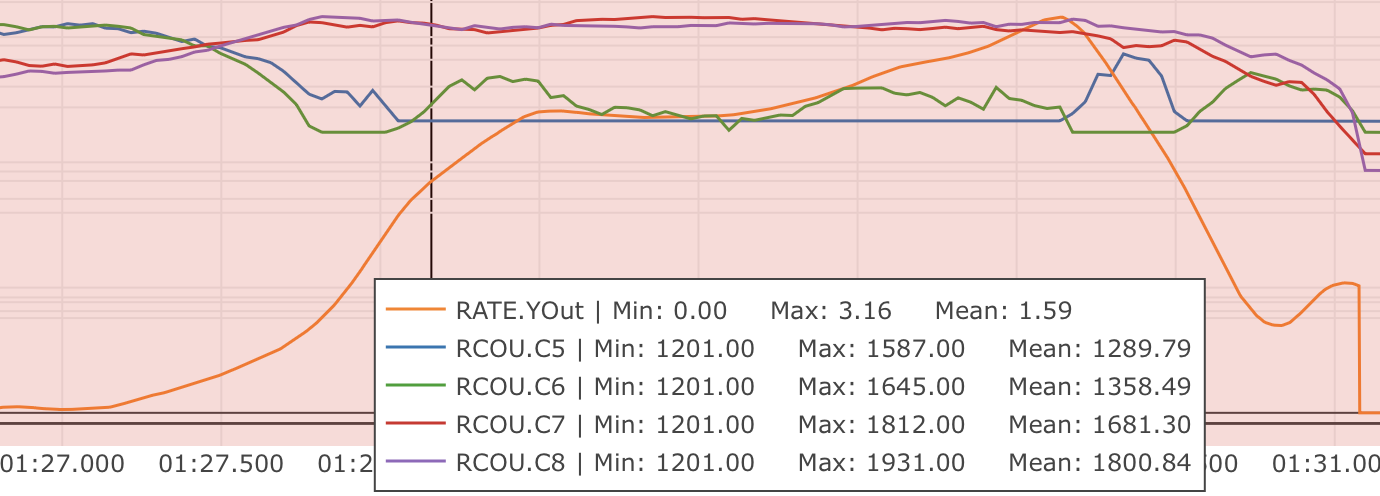
您应该查看悬停日志中的 RATE YOut 值,检查用于维持偏航的推力大小。如果在无风、无飞行员输入的情况下悬停时,该值超过 10%(0.1),那么您就有偏航不对称的问题,应该加以解决。原地悬停可能看起来很好,您可能在检查日志时才发现问题。
下面的日志显示 RATE.YOut(橙色)在电机 1 (RCOUT.C5) 空转和电机 2 (RCOUT.C6) 几乎不工作时急剧增加,但同时电机 3 (RCOUT.C7) 和电机 4 (RCOUT.C8) 正在运行 > 50% 输出。这就限制了固件在这些电机达到最大值的情况下提高总推力的可能性。
解决偏航不对称问题可能涉及机械方面的改进,例如加固机身以防止扭曲,确保螺旋桨的流向不受 TVBS 机架机翼的阻碍,或者修正/调整电机倾斜角度。
有些 QuadPlanes 可以设置为 H 型框架,而不是 X 型框架。哪种方式最有效取决于发动机支架在受到推力时的扭转方式。如果您在偏航控制方面一直存在问题,那么可以考虑在 X 型和 H 型机架之间更换机架类型,但如果垂直起降固定翼飞行器的发动机安装在机翼上的吊杆上,则通常会将其设置为 X 型机架。
步骤 9:凹槽滤波¶
在实现 QHOVER 无振荡飞行后,下一步就是设置一个良好的带阻滤波器,以减少 VTOL PID 控制器的噪音。一套好的带阻滤波器参数对良好的调整至关重要。
要获得带阻滤波器设置,您需要在没有飞行员输入的情况下悬停 QuadPlane 2 分钟,并使用 ins_log_bat_mask 设置为 1。这将启用 FFT 日志,为正确设置带阻滤波器提供指导。然后应仔细阅读 利用动态谐波带阻滤波器管理陀螺仪噪声 记录和设置谐波带阻滤波,以消除陀螺仪的噪音。
在设置滤波器时,您应该考虑造成振动的原因。在大多数飞机上,您发现的振动将直接由转速的倍数引起,但在某些飞机上,机架共振或(飞行)控制器支架的共振可能是原因。了解任何共振的原因对于降低噪音以获得良好的调试效果至关重要。
步骤 10:手动调整滚动和螺距¶
您可能很想直接进行自动调整,但不建议这样做。大多数 QuadPlanes 需要手动调整滚动和俯仰,然后才能进行自动调整。如果直接进行自动调整,飞机可能会变得不稳定,以至于坠毁。良好的手动调整还能减少自动调整所需的时间,而这对于许多垂直起降固定翼飞行器较短的 VTOL 悬停时间来说至关重要。
在开始手动调试之前,您应回头检查是否已完全完成上述步骤,并确保设置了良好的带阻滤波器来消除陀螺仪产生的噪音。
在 QSTABILIZE 或 QHOVER 模式下悬停飞机,风力较小,天空视野良好,GPS 锁定良好。您应按照下文所述调整速率增益,每次调整后都要在摇杆上轻轻 "抽动",以尝试触发振荡。
如果开始振荡,请勿大幅或突然输入操纵杆。平稳地减小油门使飞机着陆,同时使用非常缓慢和微小的滚转和俯仰输入来控制飞机位置。
您要调整的参数是
备注
如果 VTOL 发动机不倾斜,则 Q_A_RAT_PIT_FF 和 Q_A_RAT_YAW_FF 将为零,校正主要由 P/I/D 来完成。但如果俯仰或偏航控制主要通过倾斜电机来实现,则 FF 项占主导地位,P/D 主要用于干扰修正。关于倾斜电机控制轴的调整,请参见 音高和偏航飞行稳定调整.
首先是滚动参数,然后是间距。
以 50%为单位增加 D 项,直到观察到振荡为止
以 10%为单位减少 D 项,直至振荡消失
将 D 级期限再缩短 25
以 50%为单位增加 P 项,直到观察到振荡为止
以 10%为单位减少 P 项,直至振荡消失
将 P 级期限再缩短 25
在上述步骤中每次更改 P 项时,都应将相应的 I 项设置为等于 P 项。这些参数可以在地面上更改,最好是解除警报。或者,有信心的飞行员可以在飞行中使用 GCS 或发射机飞行稳定调整选项进行设置。参见 基于发射机的飞行稳定调整
需要注意的是,一旦正确设置了带阻滤波滤波,D 值通常会比默认值增加很多。比默认值提高 10 倍的情况并不少见。能够使用更大的 D 增益是良好带阻滤波滤波的主要优势之一,可以产生更好的音调。
完成上述步骤后,应仔细查看日志,确保没有隐藏的振荡。QuadPlanes 的结构有时意味着外部可能看不到振荡。您应使用 RATE、PIQR 和 PIQP 信息查找振荡。
步骤 11:评估飞机调试¶
您需要对飞机的调试进行评估,看看前面的步骤是否已经使飞机的调试达到了过渡飞行或自动调试的要求。
在 QHOVER 或 QSTABILIZE 中起飞
进行小幅度的滚转和俯仰输入。从 5 度输入开始,将操纵杆释放到中心、前平移/俯仰、左、右、前滚后,然后是对角线上的所有 4 个点
逐渐增加输入,使摇杆完全偏转
快速瞬间将摇杆完全偏转,然后让摇杆弹回中心
如果操纵杆输入后飞机开始明显过冲或振荡,请在情况开始危及飞机之前停止测试。在运行自动调整之前,飞机可能需要更多的手动调整。
要测试独立于输入整形的稳定回路,请设置参数: q_a_rate_ff_enab 为 0。
在 QHOVER 或 QSTABILIZE 中起飞
保持滚动或俯仰输入
松开操纵杆,观察飞机平飞时的过冲情况
逐渐增加摇杆偏转至 100%
如果飞机明显超调或出现振荡,则停止测试,返回手动调试。
设置 q_a_rate_ff_enab 测试完成后,将 "1 "改为 "1"。
步骤 12:自动调整¶
通常,良好的手动调校就足够了。不过,自动调整有时也能改善调整效果。
如果飞机看起来足够稳定,可以尝试进行自动调整,并且您有足够的电池进行自动调整,那么您可以使用两种方法之一进行自动调整:
Quick Tune LUA Applet(如果您的(飞行)控制器能够运行 LUA 脚本,那么这是首选方法)
QAUTOTUNE 模式(不再是推荐方法,但如果无法使用 LUA 脚本,也可以使用该模式)
使用 VTOL 快速飞行稳定调整 LUA 小程序自动进行飞行稳定调整¶
对于使用(飞行)控制器的系统,其内存足以运行 LUA 脚本如基于 F7 和 H7 的控制器,这一过程已通过 LUA Applet 自动完成。
中的说明,确保已设置脚本并分配了足够的内存。 LUA 脚本.
使用 QAUTOTUNE 模式自动飞行稳定调整¶
请按照 QAUTOTUNE page.
您应该一次只在一个轴上使用 QAUTOTUNE(设置 q_autotune_axes 为要调整的轴)。单轴自动调整通常需要 5 至 8 分钟,但如果手动调整不够好,则需要更长时间。如果您没有足够的电池进行至少 8 分钟的垂直飞行,则不建议使用 QAUTOTUNE。
有许多问题会导致 QAUTOTUNE 无法提供良好的调校。QAUTOTUNE 失灵的部分原因如下:
陀螺噪音大。
错误值 Q_M_THST_EXPO.
灵活的框架或有效载荷安装。
过于灵活的隔振支架。
非线性电调响应
非常低的设置,用于 Q_M_SPIN_MIN.
螺旋桨或发动机超载。
自动调整尾翼的俯仰轴或偏航轴,或 TiltRotor 上的矢量偏航轴,因为它们需要前馈。
如果 QAUTOTUNE 已失效,则需要重新进行手动调整。
QAUTOTUNE 成功的一些标志是
下列数值的增加 Q_A_ANG_PIT_P 和 Q_A_ANG_RLL_P.
QAUTOTUNE 会尝试将每个轴调整到飞机可以承受的范围。在某些飞机上,这可能会造成不必要的反应。这是大多数飞机的指南:
Q_A_ANG_PIT_P 应从 10 个减少到 6 个
Q_A_ANG_RLL_P 应从 10 个减少到 6 个
Q_A_ANG_YAW_P 应从 10 个减少到 6 个
Q_A_RAT_YAW_P 应从 1 降至 0.5
Q_A_RAT_YAW_I: Q_A_RAT_YAW_P x 0.1
只有在 QAUTOTUNE 生成较高值时才可更改这些值。小型特技飞机可能更倾向于尽可能保持较高的数值。
步骤 13:设置输入整形参数¶
QuadPlane 有一组参数可以定义飞机的飞行感觉。这使得飞机的调校可以非常激进,但驾驶起来仍然感觉非常温顺友好。
其中最重要的参数是
Q_A_RAT_YAW_P:偏航率 x 45 度/秒
Q_ANGLE_MAX:最大倾斜角
q_a_accel_p_max:节拍加速度
q_a_accel_r_max:滚动加速度
q_a_accel_y_max:偏航加速度
Q_A_ANG_LIM_TC:飞机平滑时间
QAUTOTUNE 模式飞行稳定调整将设置 q_a_accel_p_max, q_a_accel_r_max 和 q_a_accel_y_max 根据 QAUTOTUNE 测试期间的测量结果,将参数设置到最大值。未经仔细测试,这些值的增加不应超过 QAUTOTUNE 建议的范围。在大多数情况下,飞行员会希望大幅降低这些值。
快速 VTOL 调整 LUA 小程序不会从默认值调整这些参数,您可以调整它们以获得想要的感觉。
对于设计用于运载直接安装的大型有效载荷的飞机来说,最大值为 q_a_accel_p_max, q_a_accel_r_max 和 q_a_accel_y_max 应根据最小和最大起飞重量(TOW)进行减少:
q_a_accel_p_max x (min_TOW / max_TOW)
q_a_accel_r_max x (min_TOW / max_TOW)
q_a_accel_y_max x (min_TOW / max_TOW)
Q_A_RAT_YAW_P 应设置为约 0.5 x q_a_accel_y_max /4500,以确保飞机能在大约半秒内实现全偏航率。
Q_A_ANG_LIM_TC 可能会以反应时间变慢为代价,来增加摇杆的顺滑感。
特技飞行飞机应保持 q_a_accel_p_max, q_a_accel_r_max 和 q_a_accel_y_max 由 QAUTOTUNE 提供并减少 Q_A_ANG_LIM_TC 以获得飞行员所需的操纵杆手感。
输入整形参数的完整列表如下