倾斜转子设置技巧¶
一旦完成伺服功能分配,以及 "伺服功能分配 "一节中讨论的其他参数,您就可以在 "伺服功 能分配 "一节中查看这些参数。 倾斜旋翼机 然后,就可以开始设置倾斜装置的行程和范围了。
在Mission Planner地面站的 "设置"(或 "初始设置",取决于版本)菜单中,在 "强制硬件/伺服输出 "下,您将看到每个输出分配、最小/最大/微调和反向。您将在该选项卡和 "数据"(之前的 "飞行数据")选项卡之间来回切换多次。
提示
马达在过渡到/从正向飞行时的不对齐会对平稳性甚至适航性产生很大影响。尽可能精确地使它们同步和对齐是值得的。
机械设置¶
卸下螺旋桨!给飞机供电,使伺服器处于激活状态(可能需要启动安全开关)。不要打开发射机。我们希望它保持未上膛状态,但舵机处于激活状态。
如果要在固定翼飞行中使用矢量辅助系统(如q_tilt_fix_angle 非零),请务必设置该参数,因为它将在设置过程中影响电机的额定前推力位置。矢量偏航也是如此,请务必设置 q_tilt_yaw_angle 然后再继续。
将倾斜伺服器的输出臂连接到伺服器上,或将伺服器连接到倾斜装置上(如果是直接安装式),使其从水平位置到垂直位置的行程相等。这是在伺服处于中程(1500us)时进行的。您可以在任务计划程序中将指定的倾斜舵机的最小/最大输出值都设置为 1500,这样它们目前只能在任何模式下被驱动到该值。
安装并调整连杆机构(如果不是直接安装式),使支点到支臂上滚珠连杆的连线与输出臂成相同角度。将伺服最小/最大值分别设置为 1300/1700。
前往
数据菜单,使用行动选项卡来使用设置模式按钮,然后选择 MANUAL(手动)模式(如果还没有)。它会询问您是否真的要这样做,因为它没有上膛。点击 "是"。检查发动机是否移动到了前飞位置(或多或少,因为现在为了防止超限,范围受到很大限制),然后将模式更改为 QSTABILIZE(稳定),并检查是否向垂直方向移动。返回Mission Planner地面站设置/必备硬件/伺服器输出,根据需要反转倾斜伺服器以获得正确方向。现在我们将调整行程。这是一个反复的过程,在手动模式下改变一个端点的值(最小值或最大值,取决于伺服方向),然后切换到 QSTABLIZE 模式并调整另一个端点。伺服输出屏幕是一个 "实时屏幕"。当您更改它时,其值会立即反映在伺服输出中。您需要确保 MANUAL(手动)模式下的位置使两个电机都抵住止动器(如果使用),并在全速前进的飞行位置上仅有一点点扭矩。扭矩太大,伺服器会过热。扭矩太小,则会导致位置松散,在空中会有一些反弹。您希望两个电机在装回螺旋桨后完全对齐,固定翼模式下的差异将导致滚动力。如果偏差过大,您就无法通过全副副翼来停止翻滚!
在 QSTABILIZE 中,两个电机都应对齐。它们可以是垂直的,但您可以将其设置为当 AHRS 水平线处于水平时,它们也是垂直的。这样做的结果是,当机身平直时,它们会指向前方一点(由于您没有处于飞行姿态,地平线将为负 2-5 度)....read。 https://ardupilot.org/plane/docs/quadplane-tips.html 了解更多信息。
最后,请确保您设置的舵机最大值和最小值可以实际获得。对于矢量偏航,可以设置 Q_OPTIONS 第 10 位,允许在 QSTABILIZE 的工作台上进行偏航(方向舵杆输入),以检查范围。对于固定翼倾斜辅助,可以设置 q_tilt_fix_gain 暂时调至 1.0,并在手动模式下将升降舵和副翼摇杆移至极限位置,以驱动倾斜。
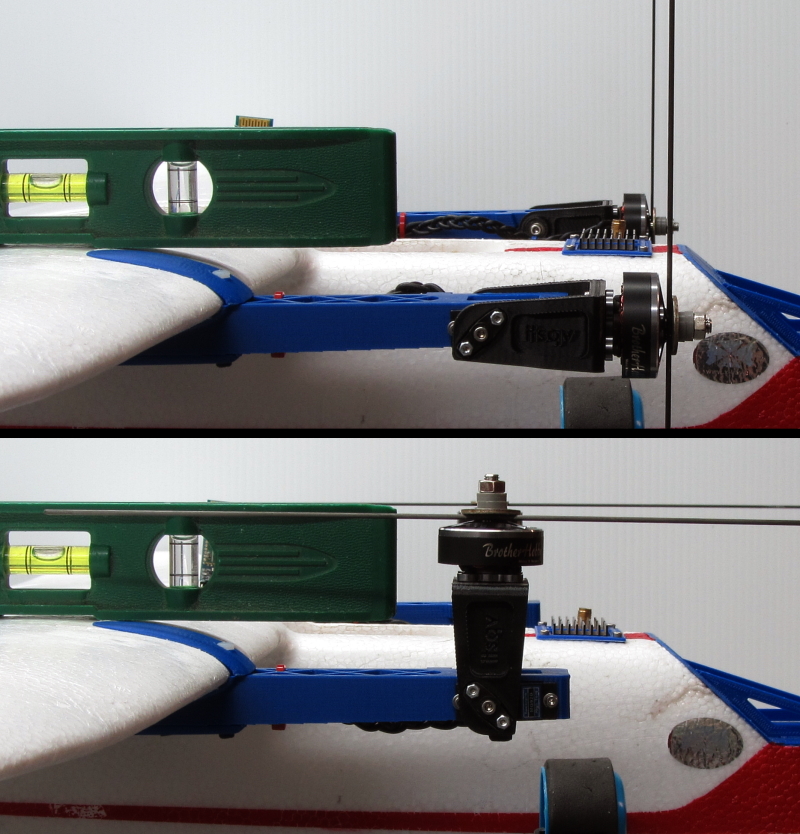
(照片由 Mark Qvale)
设置完成后,在两种模式下反复检查对齐情况。
备注
您可以通过设置 Q_TILT_RATE_DN =0 和 Q_TILT_RATE_UP 暂时 =2(度/秒)。但您必须使用 FBA/FBWB/ 或 STABILIZE(稳定)模式,而不是 MANUAL(手动)模式来进行此测试,因为 MANUAL(手动)模式强制要求下降速率至少为 90 度/秒。
最后,转到
设置/"可选硬件/电机 "选项卡,依次点击电机 A、B 和 D(用于三旋翼倾斜垂直起降机),验证电机方向是否正确(不带螺旋桨!)。