启动/停止开关¶
在某些机器人比赛中,不允许使用遥控控制,必须在以下情况下启动机器人 载具 模式。本文将介绍如何设置这种开关。
备注
您不一定需要使用开关来实现这一点。如果启用 自动启动 您只需踢一下您的漫游车(不要太用力!),感应到的加速度就会自动启动载具。但是,如果您不想踢您的车,开关是个不错的选择)。
物理布线¶
该功能的工作原理是将 APM 端口分配给启动/停止开关,APM 将等待该引脚变为低电平(接地)。启用该功能后,漫游车代码将不会向自动模式下的漫游车电机供电,直到检测到该引脚状态。因此漫游车将保持静止不动,等待你轻按开关。一旦你按下开关,它就会像往常一样执行 "自动 "任务。您可以随时将开关拨回关闭位置,停止运动。
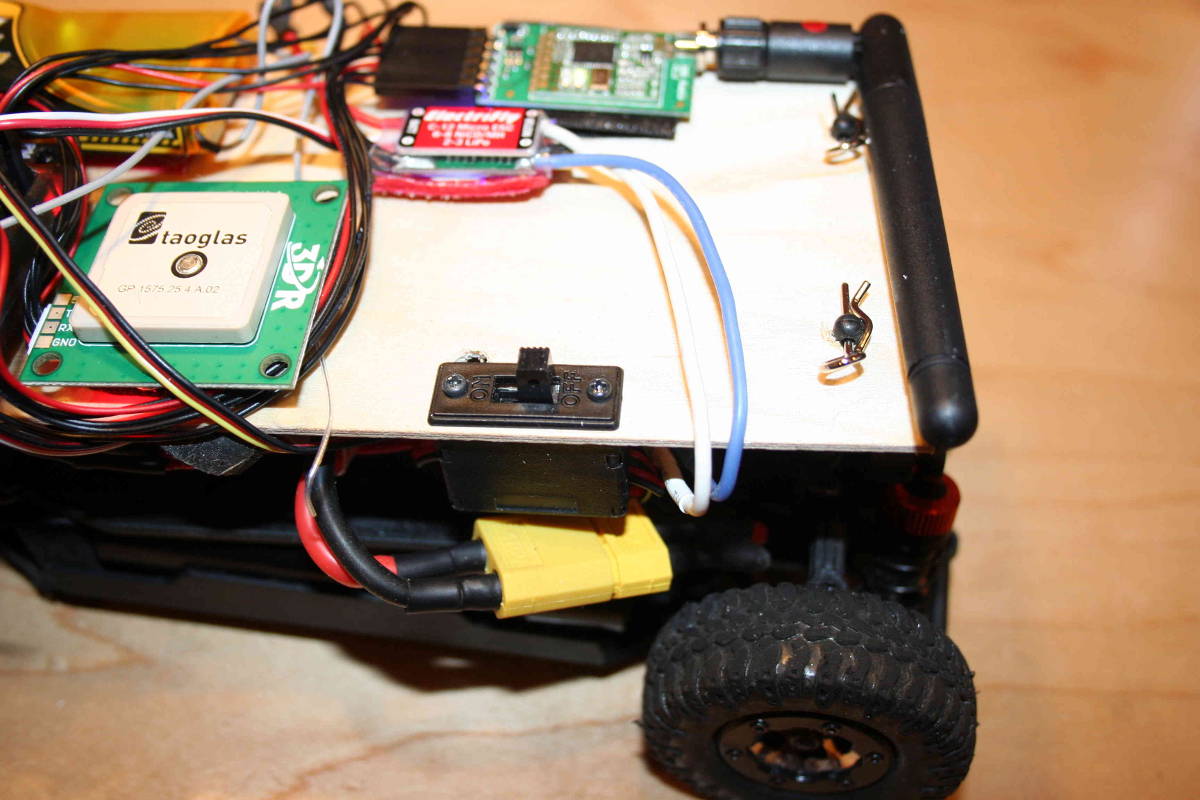
任何双位开关都可以使用,从拨动开关(如 这个) 连接到滑块,如图所示。应该只有两个端子。如下图所示,一个接遥控伺服电缆的白线,另一个接黑线。这样,当开关处于 "开 "的位置时,它就连接了接地和信号引脚。
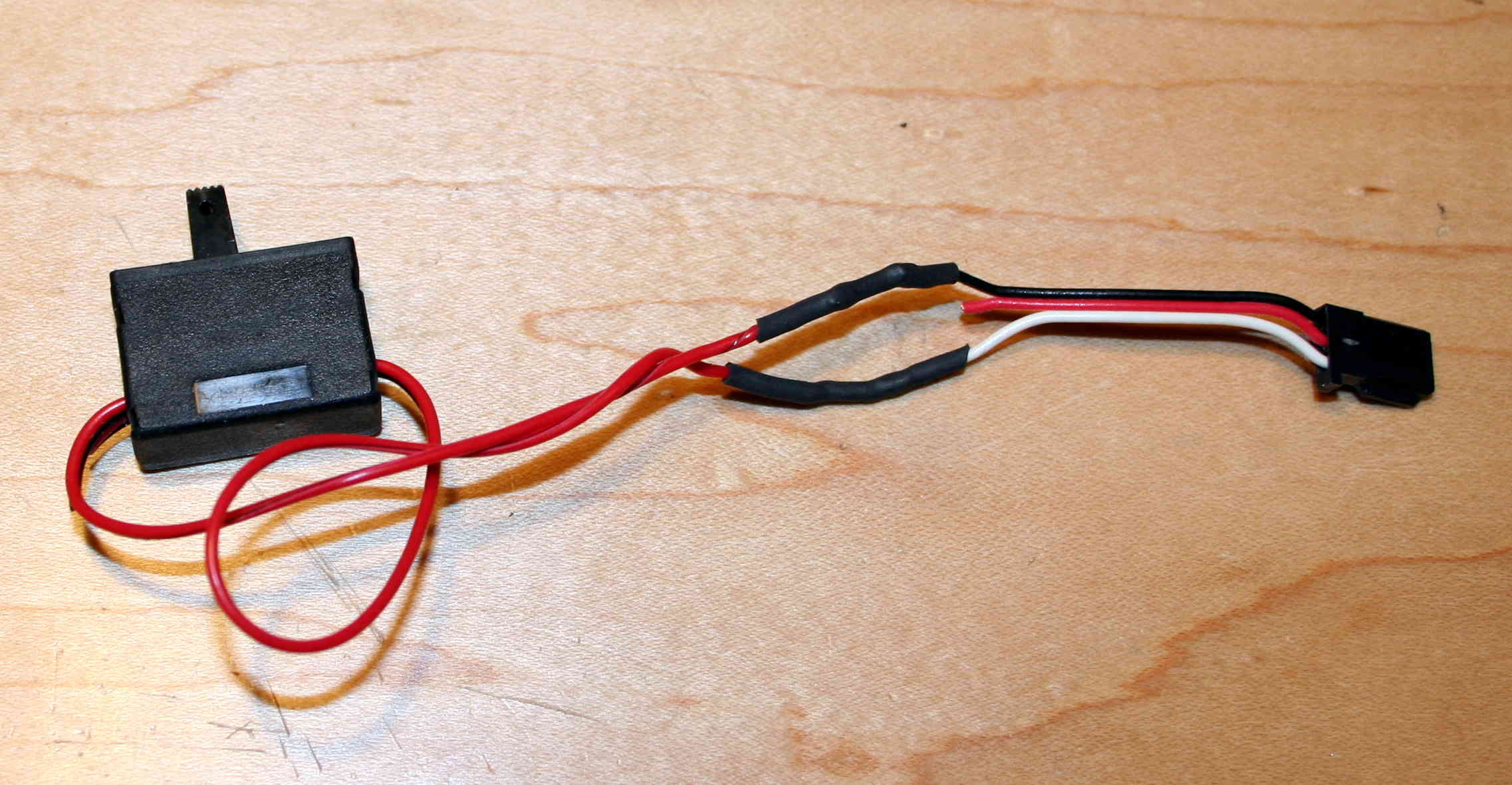
将该连接器插入 APM 的 A0-A8 端口(8 以上的端口不是数字引脚,不能使用)。我们通常使用 A4,因为声纳传感器使用 A0-A3。
软件设置¶
在 "高级参数列表 "中输入与该交换机相连的 APM 端口的编号,就可以启用该交换机。 自动触发引脚 参数。在下面的示例中,我们输入了 4,因为交换机插入了 A4 端口。

如果您完全不使用 RC,也无法手动切换模式,您可能需要设置 APM,使其在开机时启动到自动模式(自动启动功能只在自动模式下工作)。您可以通过设置 初始模式 至 10(其他选项见参数)。

设置完成后,您在机器人比赛中需要做的就是打开漫游车电源,等待 GPS 锁定,当绿灯亮起时,轻按开关。然后漫游车就会开始工作!
备注
根据您的故障安全设置,如果没有 GPS 锁定,漫游车可能无法移动。在按下自动启动开关之前,请检查这一点)。