气压计(外部)¶
大多数(飞行)控制器都在(飞行)控制器上直接安装了气压计,但为了使气压计远离气压干扰,安装外部气压计也很有用。它还可以在 -40 - +85°C 的典型范围内监测环境或内部组件的温度。
警告
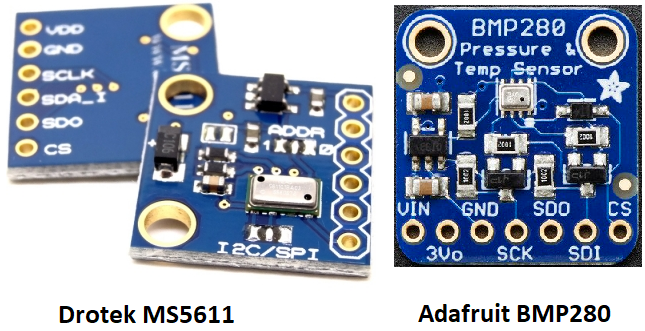
Copter-3.6 仅支持 Drotek MS5611。Copter-4.0 将支持 BMP280。
备注
旋翼飞行器用户可以通过启用以下功能来部分减少气压干扰的影响 地面效应补偿
购买地点¶
连接和配置¶
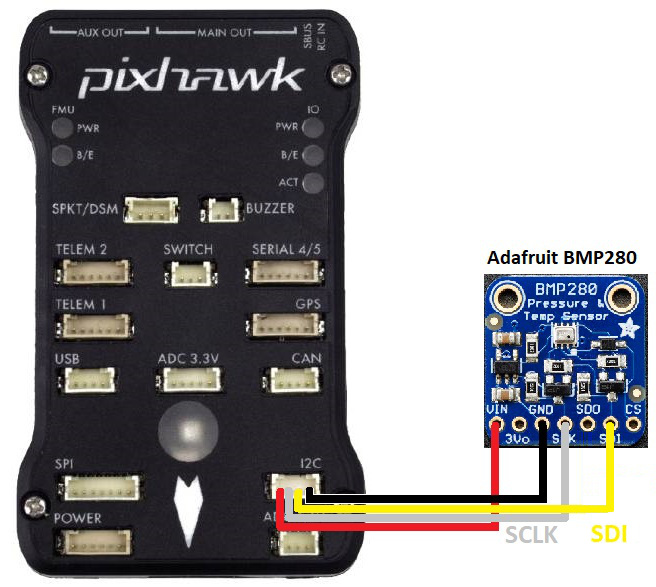
将气压计连接到(飞行)控制器的 I2C 端口,如下图所示
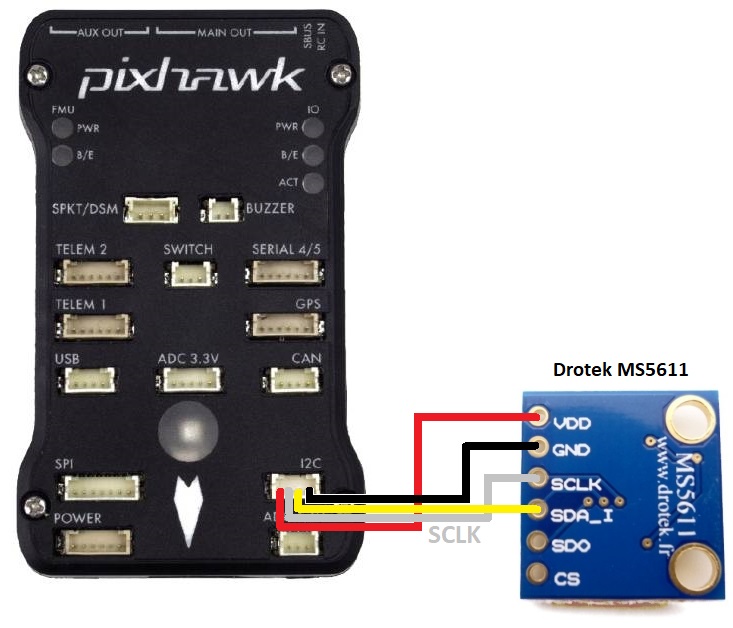
在 Drotek MS5611 电路板的顶部,应焊接 "I2C "跳线。查看电路板上是否写有 "I2C/SPI "字样。
BARO_PROBE_EXT 如果是 Drotek MS5611,则设置为 4;如果是 Adafruit BMP280,则设置为 2。更改该参数后,重新启动(飞行)控制器。
BARO_PRIMARY 将外部气压计作为主气压计使用。
测试¶
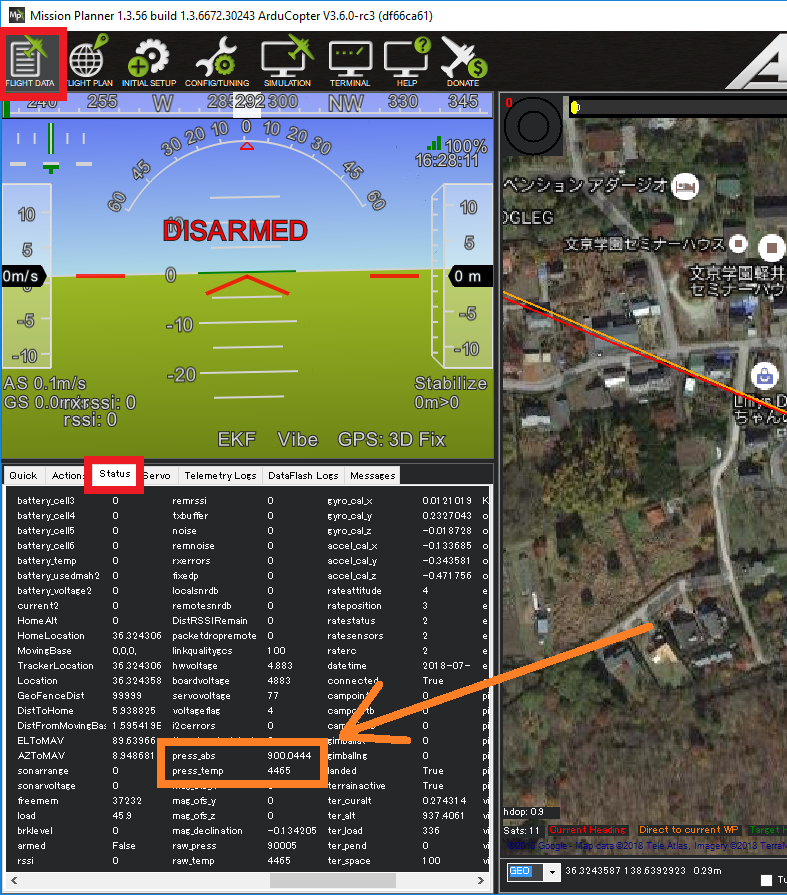
气压计的实时气压和温度会发送到地面站。如果使用Mission Planner地面站,则可在 "飞行数据>>状态 "选项卡中查找 "press_abs2 "和 "press_temp2"。
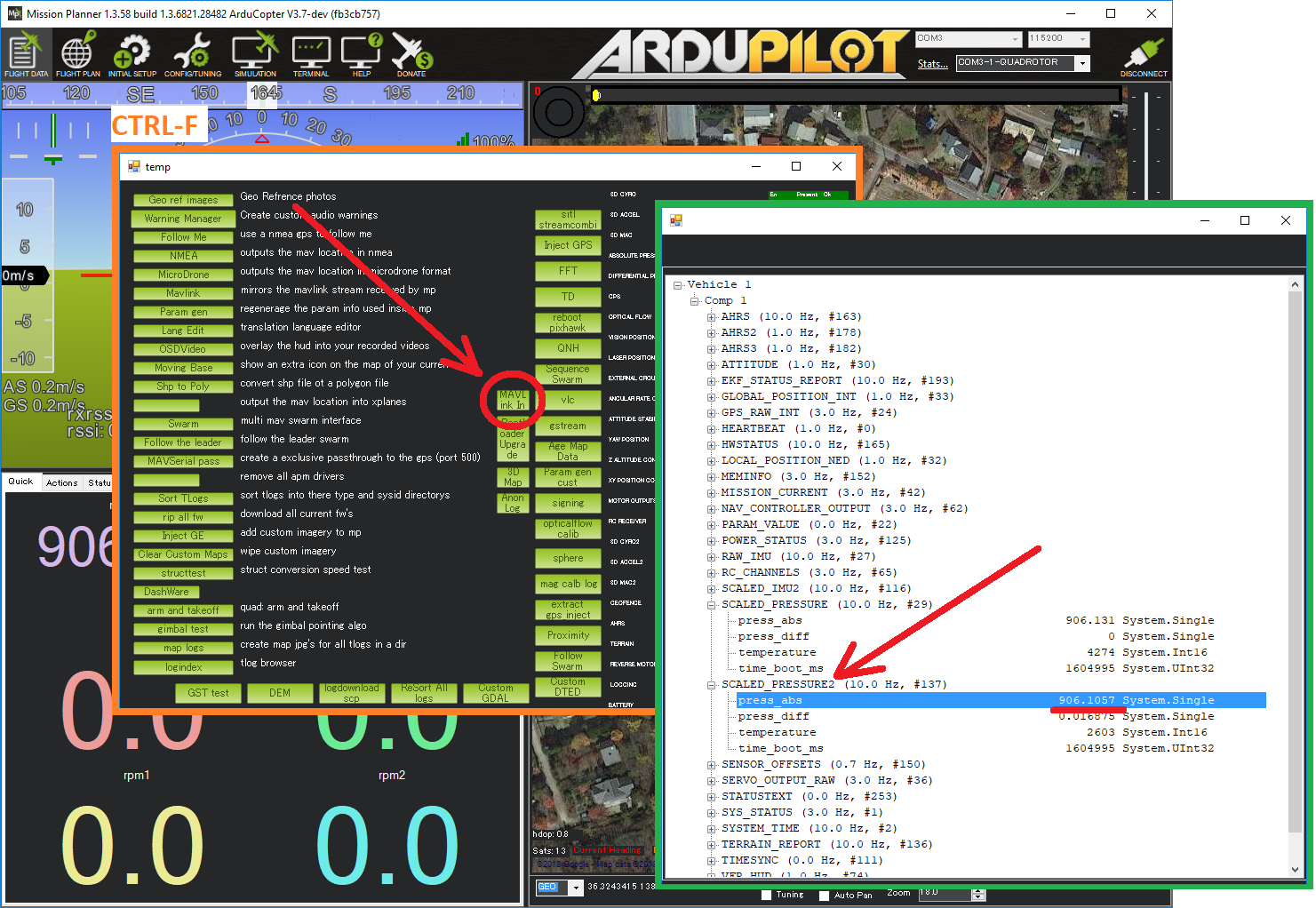
Mission Planner地面站的 MAVLink 检查器也可用于查看数据。在 "飞行数据 "屏幕上按下 Ctrl-F,然后按下 "MAVLink In "按钮,然后展开视图并查找 SCALED_PRESSURE2。
提示
如果使用 ArduPilot 板载 OSD,则可通过 OSDn_BTEMP 面板显示副气压计的温度读数。