设置悬停节流阀¶
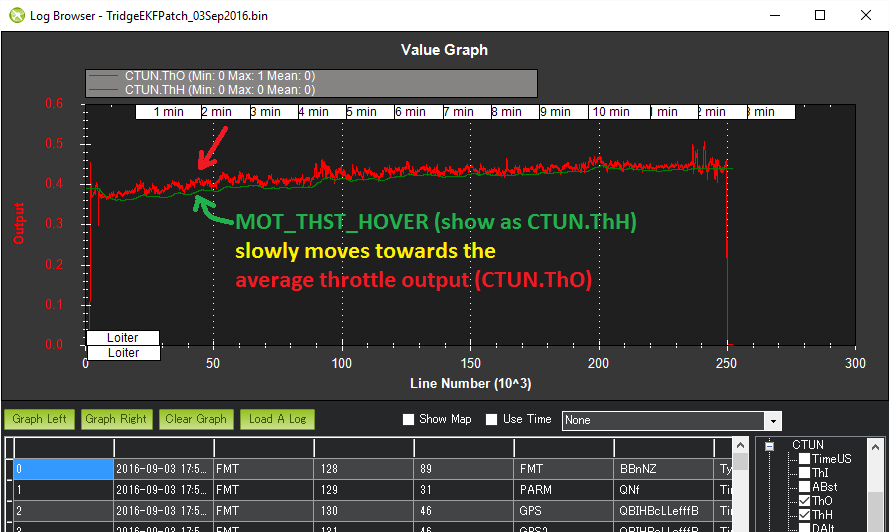
Copter 包括自动学习悬停节流阀(以前称为 "中间节流阀")。 MOT_THST_HOVER 当飞行器在非手动飞行模式(即除稳定和 Acro 外的所有模式)下保持稳定悬停时,该值将缓慢向电机平均输出值移动。
如果您想手动设置 MOT_THST_HOVER 值,最好下载数据闪存日志并将其设置为 CTUN.ThO 字段中的值。该值通常在 0.2 和 0.6 之间,但如果飞行器的功率重量比非常高,该值可能会更低。
如果出于某种原因希望禁用学习功能,可以设置 移动学习 参数为 0。