推力损失和偏航失衡警告¶
如果您看到推力损失或偏航不平衡警告,本页将概述一些检查和修改措施,以解决问题。在大多数情况下,这些警告是由于硬件选择或设置不正确造成的。
这些警告旨在检测推进系统的硬件故障。如果飞行器在飞行过程中开始出现这些警告,则应检查推进系统。在有效载荷较大和强风/逆风的情况下更容易出现警告。
潜在推力损失¶
如果在 GCS 或数据闪存日志中发现潜在的推力损失信息,则应进行调查,找出原因并采取补救措施。例如,警告会给出电机编号:
潜力 推力 损失 (3)`
这些警告是由于一个或多个电机在 100% 油门时达到饱和。由于这种饱和状态,ArduCopter 无法再实现所要求的滚转、前平移/俯仰、偏航和油门输出。如果这种情况持续很长时间,飞行器将降低高度和姿态控制,并可能坠毁。
如果在悬停或放松飞行时看到这些信息,则必须从硬件上解决问题。应通过改变推进力或减轻质量来提高飞行器的推重比。
如果仅在爬升和激烈机动中出现,降低所要求的加速度和速度可能就足够了。同样,也可以提高飞行器的推重比,以获得更高的加速度和速度。
偏航失衡¶
偏航不平衡警告用于衡量载具偏航的努力程度,警告会在偏航输出达到饱和之前触发。如果偏航输出达到饱和,载具保持偏航的能力将受到影响。在最坏的情况下,这将导致载具快速旋转。警告信息给出了最大偏航输出的百分比。达到 100% 时即为饱和。例如
偏航/航向 不平衡 87%`
如果在悬停状态下出现,则应通过硬件解决问题。如果该值在没有飞行员偏航输入的情况下不断增加,则应立即着陆。偏航不平衡可通过比较对向电机之间的 PWM 输出在数据闪存日志中识别。如下图所示,顺时针和逆时针电机之间会出现较大的油门电平差异:
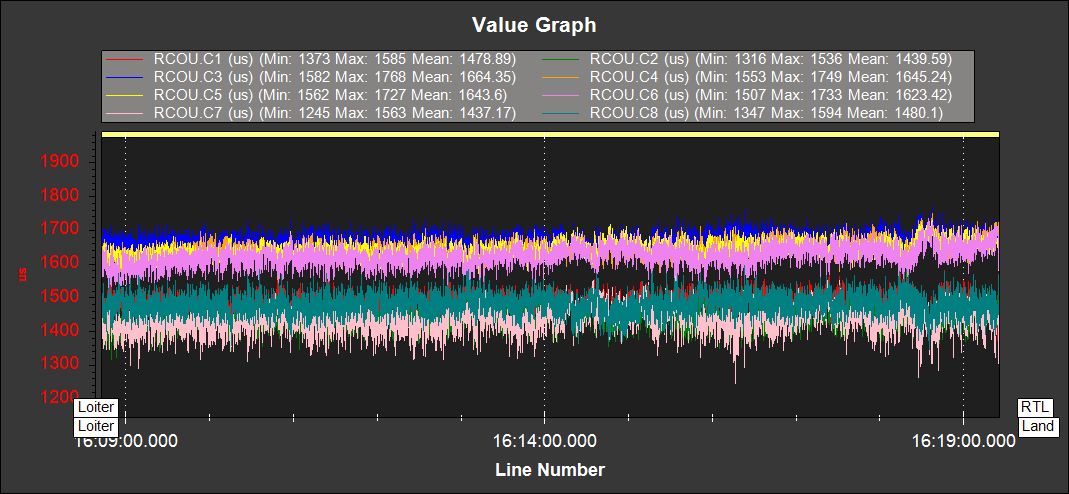
这应该可以通过硬件解决。最常见的原因是电机在圆臂上不垂直。如果不平衡现象仍然存在,可以将电机稍稍倾斜,使推力角辅助偏航的旋转方向。有些飞行器对电机推力矢量极为敏感。
如果仅在激烈的偏航动作中出现警告,可以通过提高 atc_rat_yaw_imax.不过,也许还值得重新审视偏航调整。
备注
推力损失和偏航失衡警告都可以通过 飞行选项 参数。只有在进行了大量日志审查和测试,确认警告没有发现真正的问题后,才可以这样做。