任务规划 GPS 天线跟踪¶
本文将介绍如何构建基于 GPS 的 天线跟踪器 使用 Mission Planner地面站 GCS 为伺服驱动定向天线提供定向/跟踪信息。
备注
这种方法要求全球定位系统运行在可以访问 GPS 信息的个人电脑上。参见 天线跟踪 其他选项。
概述¶
一个 天线跟踪器 是一种跟踪载具位置的系统,并利用这一信息瞄准定向天线。
本文介绍的跟踪器使用Mission Planner地面站来确定跟踪器的瞄准方向,使用的是 GCS 的位置和载具的当前位置信息。跟踪器需要飞行器提供 GPS 遥测信息,还需要伺服控制器卡才能通过Mission Planner地面站驱动伺服系统。
部件¶
以下是构建此跟踪系统所需的主要部件清单(不包括螺丝、胶水等所有部件)
各部件的功能将在以下分节中介绍:
身体¶
您需要一个能够承受天线巨大重量的机身。4 磅是一个 "巨大 "的重量,这取决于舵机的扭矩和材料。 这就是我在本指南中选择使用的版本。 目前,它可容纳两个贴片天线,每个重约 12 盎司。你可以设计自己的机身,但你应该有一个 数控机床 作为解决方案的一部分,因为任何误差都可能使其无法正确跟踪,从而导致飞机失事。全木质结构可用于两根天线,而金属机身可用于最小结构或提高耐用性。
需要特别提及的是齿轮。我使用的机身带有齿轮。齿轮可以做几件你可能会觉得有用的事情。首先,它们可以将扭矩 "转换 "为距离(甚至改变力的作用角度);其次,它们可以提高或降低旋转速度。有时,你可以用它们使你的身体与伺服器半分离,就像我上面举的例子一样,这非常非常有用。你也可以完全不使用它们。
在选择齿轮时,请注意以下几点。首先,从伺服器中心到 AT 旋转中心轴的距离越远,达到的扭矩就越小。所有伺服器的额定值都是 10 千克厘米或 100 盎司英寸,这意味着当您在距离伺服器中心 1 厘米处测量该力时,该伺服器具有 10 千克的力,同样,100 盎司英寸是指在距离伺服器轴中心 1 英寸处测量 100 盎司的压力。因此,距离越远,例如 2 英寸,在该距离上感受到的扭矩就会减半(因为力的作用距离增加了一倍),在我们的例子中就是 5 千克或 50 盎司。
速度的变化取决于齿轮的直径和齿数。经验法则是,齿轮越大,转动速度越慢,而齿数与齿轮的大小有关。因此,一个有 44 个齿的大齿轮与一个直径只有其一半、有 22 个齿的齿轮啮合时,小齿轮的转速是大齿轮的两倍。你刚刚将扭矩转换成了速度。
天线¶
您需要决定使用哪种天线。频率是 巨大 这一点。事实上,频率选择本身就是一种指导。有些天线声称可在一定频率范围内使用,但这并不总是合法的。915Mhz(又名 900Mhz)是非常特殊的频率,您的天线可能被工厂 "飞行稳定调整 "到 "最佳 "接收频率 912Mhz,这样您就完蛋了。请仔细阅读天线说明。在本指南中,我选择了 1280Mhz(又称 1.2 或 1.3 Ghz)和 915Mhz 的贴片天线,这些天线来自于 L-COM.您可能会想 "跳频怎么办"?您的无线电可能会尝试超出 "有效 "带宽(您的天线可以很好地使用的频率范围),但如果这样做,就会导致信号下降(又称 "跳频")。 RSSI接收信号强度指示器),并对其进行补偿。不用担心这个问题,只需确保您的天线在正确的频率范围内即可。
伺服¶
您需要两个伺服器。一个用于俯仰动作,一个用于平移动作。倾斜只移动天线,平移可以移动整个天线,也可以只移动天线,这取决于您的设计。伺服器实际上是一种复杂的小装置。我将尽量做到精确,因为如果您愿意,可以通过互联网查找有关伺服器的更多详细信息。您需要一个能为两个贴片天线提供至少 110 盎司-英寸扭矩的伺服器,我建议至少使用 喀碳岩材料 但尼龙材质的也可以使用。
在倾斜伺服器方面,应选择可旋转 90 度的伺服器。不同的制造商对伺服器的总旋转量有不同的解释,因此您必须做足功课。总旋转 90 度是 "标准 "伺服器。
对于平底锅(特别是这种 AT,您的要求会有所不同),我建议两根天线的扭矩至少超过 150 盎司-英寸,并且使用卡硼石或更好的全金属齿轮。如果您能买到,请使用数字伺服器(强烈推荐),因为这里的 AT 能够进行微小的纠正动作,而模拟伺服器可能无法像数字伺服器那样跟上。造成这种整体性的原因是,当您的摇摄范围达到行程极限时,AT 会迅速自转 360 度,以保持天线瞄准目标。 (以 1:50 秒为例)。 它做得越快,您与飞机失去通信的时间就越短。如果使用 APM Mission Planner地面站,就无法避免这种行为,因为这种行为已嵌入软件中。制造一个不关心平移范围的 AT 需要耗费大量资金,因为它开始涉及到所谓的滑环。军方使用的滑环非常漂亮,但由于滑环的质量问题,价格也非常昂贵。如果能做到这一点,就可以避免电缆缠绕问题,伺服范围的选择也可能变得更容易。对于该构建,您需要的摇摄动作是可以 360 度旋转的伺服器。您并不需要更多。
伺服控制¶
您将需要一些东西来获取计算机中的信息(同样,本次构建使用 APM Mission Planner地面站来驱动 AT),并将这些信息转化为伺服器可以使用的信号(实际上是数字)。APM MP 目前有两个选项,一个用于 大师 和一个 ArduPilot.Maestro 链接到伺服控制器卡,而 ArduPilot 既是伺服控制器,也是精简版(飞行)控制器(实际上是将原始 APM 用作伺服控制器卡)。为了更清楚起见,有些文章将 ArduPilot 称为 ArduTracker。通过微型 USB 电缆提供的输入,Maestro 最多可以运行 6 个舵机,但您只能使用其中的 2 个舵机和电源引脚。ArduPilot 版本使用的是名为 ArduPilot 的 APM 早期版本之一。它的结构简单,价格便宜,您可能有一个多年前的版本,我对它了解不多,但是 这是一个构建 快乐基尔莫尔的 GCS 使用的和 她们 写了一篇关于这两部电影的文章。我经常使用它,您自己阅读也不会有错!无论您使用哪种控制器驱动舵机,都需要下载并安装固件。Maestro 已预装,而 ArduPilot 卡的固件似乎需要从其网站或本网站的软件库中查找。
为伺服控制器获取正确的数字至关重要、 以此为鉴.基本上,您需要找到两个数字,这两个数字是您的舵机所能做的总旋转量的中点,它可能小于舵机所能做的旋转量,但不会超过,然后您需要找到这两个中点的中心点,然后告诉 Maestro 应该使用的 "8 位 "范围,作为发送给舵机的指令。正确处理这些问题非常关键,我做得头发都掉光了。
电池¶
好的,舵机的运行电压为 4.8、6 或有时 7.2V 或更高。大多数舵机默认的 RC 待机电压为 "5V"。这个舵机使用的是 6V 电压。电池充满电后可输出 12.5V 电压。如果您没有找到一种方法将电池电压降到舵机的正确可用电压,您的舵机就会烧毁。您的伺服电机可能会冒烟,或者伺服电机中的电路板可能会冒烟,无论哪种情况,伺服电机的可靠性都将大打折扣,您应该更换一个新的伺服电机。如果您没有更换,而它在飞行中出现故障,您可能会因为 AT 无法正确指向而失去连接!您需要的是 BEC(电池消除电路)。该项目使用了 这个.如果您做足了功课,您可以查询所选舵机的空载和满载电流消耗,然后选择一个能够处理该负载的 BEC。如果您的 BEC 无法处理舵机可能产生的自发最高负载,那么舵机就会烧毁,您的 AT 将失去动力,飞机再见。
电池低电压警告装置¶
您不必使用它,但我会用。它很便宜,不仅可以节省电池,还能在自动变速器即将熄火时告诉您。它的声音就像烟雾探测器爆炸一样响亮!买几个用用吧,别那么小气,真的。
视频 Rx 和 Tx¶
Rx 和 Tx 分别是接收器和发射器的简称。在此,AT 制作指南不打算介绍这些内容,而只是想告诉您,无论您使用哪种系统,都要确保它适合您的 AT。您的 AT 会变得拥挤而凌乱,因此它可能会与最小的东西发生绑定。粘连是不好的,知道吗?
三脚架¶
您可以想出另一种方法,但这无异于重新发明轮子。AT 越高,信号传播就越远。尽量选择没有很多突出部分的天线。它们最终会缠住电线。注意三脚架使用的连接器类型,这样您就可以设计 AT 与之连接。要选择坚固的三脚架,因为一阵大风就可能将其吹倒,从而导致飞机无法连接。您的 AT 最大重量应在 7 磅左右,根据您的用途可能会轻一些。
图片库¶
连接部件¶
尼龙搭扣和拉链,您可以在这里大量使用它们!
1) 将伺服控制器板连接到笔记本电脑,Maestro 的微型 USB 连接到 USB。
2) 伺服器连接到伺服控制器板。对于 Maestro 来说,0 号伺服器针脚用于摇摄,1 号伺服器针脚用于俯仰。
3) 将电池连接至 BEC,BEC 设置为 5V 或 6V 或伺服器能承受的任何电压(最大值)。将 BEC 连接到伺服控制器板。对于 Maestro 而言,最外侧的针脚用于驱动舵机的电池电源(USB 电缆为电路板供电)。不要反接极性,如果要反接,就买新的。
4) 将电池(此处假设为锂聚合物电池)连接到低电压检测装置,注意观察。
5) 将天线连接到 SiK 无线电设备上(切勿在未连接天线的情况下打开无线电设备,否则请购买新设备)。将天线连接到视频 Rx。
6) 您需要从电池连接的 12V 侧接上电源,为视频信号接收器提供 12V 电源。将电源连接到视频信号接收器。
7) 将 3DR 900Mhz 无线电设备连接到笔记本电脑(连接天线后)。
8) 用拉链将所有电线捆绑固定。这一点很重要。如果你在这里做得不好,你的自动变速器就会在跟踪和下降过程中绑住飞机。
添加尼龙搭扣和拉链,将所有物品固定在一起
10)切记在Mission Planner地面站中手动设置用于控制摇摄和俯仰的通道的终点,使用 1100µs 和 1900µs 这样的 PWM 值,以中间点 1500µs 开始。一些 180 度的伺服器可以承受 600-2400µs 的时间,但你可能会损坏一些伺服器,所以开始时要保守一些。
基本用途¶
1) 到达机场后,将反坦克导弹指向北方,用眼球尽量靠近。
2) AT 的正常可接受校准是,指向时应在北纬 10 度以内。
3) 这种特殊的机身可以抬起,从而将伺服齿轮与机身的小齿轮分开。这样就可以非常容易地调整方向。如果您没有这种功能,只需在它完成启动(因此指向您在伺服控制器编程时指定的默认 PWM 编号)后将其拿起即可。
4) 您希望将倾斜默认为倾斜伺服器行程范围的中间值,因此对于 90 度伺服器,将其默认为 45 度。当您第一次实际使用天线时,请注意倾斜的行为,并通过Mission Planner地面站中的滑动条进行手动调整。如果您对倾斜的位置很有把握,可以手动调整伺服器角。两种方法都可以,但如果使用滑动条,当伺服器试图超出其自然允许的行进范围时,就不会对其造成过大压力。
在飞行过程中,您可以使用滑杆微调天线跟踪器的指向。
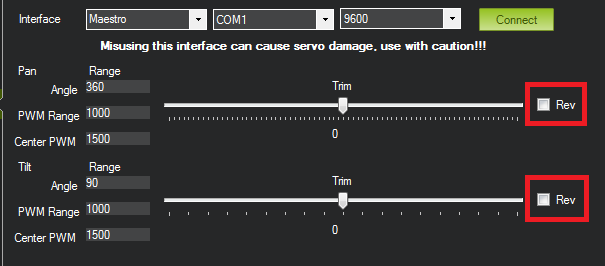
5) 如果舵机的运行方向错误。请尝试单击 Rev 复选框来反转行进方向。在连接伺服控制器之前,您可能需要选中 Rev 复选框。
高级用途¶
备注
本节节选自 Scott Fuller 的一篇文章。原文请点击此处: 昂贵但引人注目的天线跟踪器)
通常,我做的第一件事就是启动所有设备,并在 APM 上获得稳定的 GPS 锁定。之后,我会将飞机设置在天线跟踪器前方,并在飞行计划器窗口下的Mission Planner地面站中非常紧凑地放大。然后点击右键,说 Tracker Home -> Set here。
然后,我将天线跟踪器引脚拖到主页的正上方,并将其放下。这样应该就很接近天线跟踪器的位置了。
之后,我会翻到天线跟踪器下的初始设置选项卡,下拉 Pololu 伺服控制器的 COM 端口,选择 9600 波特。设置完成后,我点击连接。此时,跟踪器应开始运行。
您应该可以将飞机在天线跟踪器前方几米处移动,跟踪器也会随之移动。如果需要改变方向,也不难理解。通过滑块可以调整天线的朝向。启动时,系统会认为您朝北。如果您朝东或朝西,则必须相应地瞄准。
您可以使用 Pololu Maestro Control Center 来计算 PWM 设置以及舵机的行程。通常 PWM 设置为(大数 - 小数)= PWM。在我的例子中,摇摄为 2000 - 960 = 1040,俯仰为 1904 - 1456 = 448。这样就可以得到 45 度的倾斜角和 360 度的水平角。您可以在 Maestro CC 的状态选项卡上获得这些数字。注意不要超出建议的行程!在 Servo City 齿轮箱上,你会听到 POT 开始发出咔嗒声,然后伺服器就开始旋转。这时您就可以玩舵机定心游戏了。
使用 Pololu 板需要注意的一点是,您可能需要在串行设置下将其设置为 USB 双端口。这样就可以连接到 COM 端口。
杂项说明¶
我附上了我的 AT(第 2 版)各个角度的照片。这里有几个要点。尽可能轻地制造您的 AT。在您的经济承受能力范围内,尽可能多地安装舵机。如果您有遥测无线电设备,例如 3DR 或 Xbee 套件。我不知道怎么做,但不会比我在这里展示的更复杂,只是更贵而已。
测试有两种方法,首先在室外设置好 AT,并在启动前将其指向北方。然后带着您的飞机在 AT 周围走一圈,把所有东西都连接起来,就像飞机在飞行一样。您至少需要走 60 英尺远,为确保万无一失,可尝试走 100 英尺远。另一种方法是从 APM2 日志中加载之前记录的飞行,设置您的原点位置,然后看着您的 AT 像在那里一样飞行。
尽量测试这个东西,它现在是整个系统的关键故障点。我不建议您连接用于手动控制飞机的遥控信号(通常是 2.4Ghz)无线电。请不要对它进行修改,这样您就有了一个可以依靠的备份。
其他小玩意儿可能包括风向标、气压计、风速计、啤酒罐架、照相机等!