3DR Solo - ArduCopter 主控升级¶
本文详细介绍了如何升级和操作 ArduCopter 3.5.0 及更高版本的 3DR Solo。
概述¶
3DR Solo 包含一个 Pixhawk 2.0 (飞行)控制器。它带有 3DR 专门为 Solo 编译的早期 ArduCopter 3.3 的一个经过大量定制的分支。当您对新的 Solo 进行初始飞行前更新(或出厂重置后)时,更新的一部分就是 ArduCopter 的 Solo 分支。它安装在 Pixhawk 上,并包含所有必要的默认参数和自定义功能。它对用户基本上是透明的,是在幕后进行的。由于 3DR 不再从事消费级无人机系统业务,ArduCopter 的这个定制分支将不会再有任何更新。它上一次更新是在 2016 年初,现在已经非常落后了。
3DR 之后的生活¶
由于 Solo 使用 Pixhawk (飞行)控制器,因此除了 3DR 定制的 Solo 版本外,它还可以运行 ArduCopter 的其他版本。本文将重点介绍在 3DR Solo 上安装、配置和运行 ArduCopter 3.5.0 或更高版本。ArduCopter 延续了 3DR 一贯的风格,使 Solo 成为一款现代化、先进且功能强大的 sUAS。自动驾驶固件取得了无数的进步,使其成为更加稳定、可靠和敏捷的飞行器。它还有许多新功能,如船模式、RTK GPS、增强型遥测、ADS-B、激光雷达激光高度计、地形感知和跟踪、红外精确着陆,甚至还有 "室内 GPS"。




照片:Andrew Emmett、Matt Lawrence、Stephan Schindewolf、& Paul Dinardi
硬件要求¶
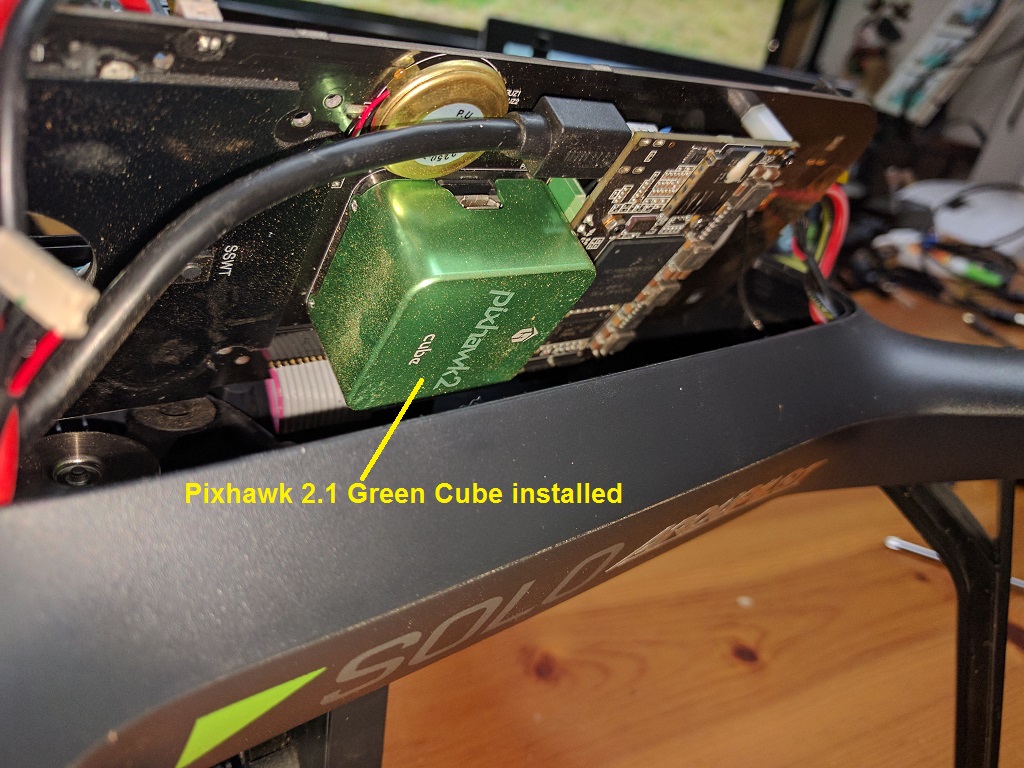
要在 3DR Solo 上安全可靠地使用 ArduCopter 3.5.0 及更高版本,目前需要 Pixhawk 2.1 Green Cube(或内部跳线设置为 5 伏的传统 Cube)。您可以从以下网站购买绿色 Cube 杰斯特无人机 或直接从 ProfiCNC.Cube 拥有更先进的组件。其中包括 3 个温控 IMU 和 Solo 安全运行所需的 5 伏信号。如果您已经拥有一个 Cube,您可以将内部焊接跳线设置为 5 伏信号,并将其用于您的 Solo。绿色立方体带有预设为 5 伏的跳线。

你 会 您也可以在原版 Pixhawk 2.0 上安装 ArduCopter master,但我们强烈建议您不要这样做。它可以安装,也可以飞行。但在飞行过程中电机关闭的风险相当高,会导致严重的坠机事故。这是因为 Solo 的电机吊舱存在电气硬件缺陷。旧版固件有一个软件补丁,可以 大多 减轻这一缺陷。这就是您可能听到的 "压摆率保护"。您可以查看现有 3DR 固件中的压摆率保护代码 在他们的 GitHub 站点上.包括 ArduCopter 3.5 在内的 ArduCopter 生产版本都没有这种回转率保护功能。除 Solo 外,这对使用 ArduCopter 的各种飞行器来说都是严重的障碍和管理难题。Pixhawk 2.1 Green Cube 中使用的 5 伏信号有效地解决了电机吊舱上的电气问题。
还有其他潜在的方法可以在不购买新 Cube 的情况下缓解电机吊舱的电气问题。您可以使用传统的 DIY 电调,绕过电机吊舱内置的电调。或者您可以制作一个电平转换器,将信号电压从 3v 提升到 5v。这些解决方案都不是商用套件,但如果您有创意,也可以 DIY 制作。虽然没有魔方中增强硬件的优势,但飞行同样安全可靠。
您不能在 Cube 上使用旧版 3DR Solo 固件。这是完全不兼容的。这也意味着,如果 Cube 仍在 Solo 中,您就无法在 Solo 上进行出厂重置。出厂重置会尝试重新加载旧的 Solo 固件,这是不兼容的。如果您需要进行出厂重置,则需要装回旧的 Pixhawk 2.0 固件,运行完整的出厂重置和更新,然后再装回绿色魔方。这很烦人,但现在和可预见的将来都没有办法解决。总之,不需要进行出厂重置。这也意味着不要丢失 WiFi 密码!不要扔掉你的旧魔方!
资源¶
网上有许多关于改装想法、供应商、固件 beta 测试、故障排除和支持的重要资源
升级过程¶
准备工作¶
在开始将 Solo 上的 Pixhawk 2.1 Green Cube 升级到 ArduCopter 3.5 之前,您需要完成一些重要的必要步骤。
完整的 Solo 和控制器工作状态良好,可配对、飞行并充满电。
独奏者和控制器都是最新的 3DR 独奏者固件,来自最初的飞行前更新。当前的 3DR 固件为 2.4.2。
经过飞行测试,各方面工作正常。未经测试或出现故障的独奏者不应被用于此过程。它无法修复故障。
Pixhawk 2.1 绿色立方体
飞利浦和平头螺丝刀
用于安卓系统的 Solex 应用程序或用于任务计划程序和 WinSCP 的 Windows PC
说明¶
有两种方法可以进行升级,这里有详细的说明。
使用 Solex 应用程序进行初始安装.这是迄今为止最直接、最值得推荐的方法。Solex 可以加载和重置固件和参数,并可直接在线访问所有必要的文件。
使用Mission Planner地面站和 WinSCP 进行初始安装.这种方法比较复杂,但同样可以成功。您需要下载 zip 文件,使用 Mission Planner 更改设置,并使用 WinSCP 传输文件。如果您没有 Solex 应用程序,则需要使用此方法。
首次飞行¶
升级过程完成后,您就可以在 Solo 上使用 ArduCopter 3.5 进行首次飞行了。建议您在可以测试一些基本功能和安全系统的地点和时间进行首次飞行。选择没有障碍物、人群、湖泊等的开阔地。
独奏/Solex 应用程序设置¶
您需要查看 3DR Solo 应用程序(如果您也使用 Solex 应用程序)中的所有设置,以验证和更新滑块、选项和设置。在这次检查中需要设置的热门项目包括但肯定不限于以下内容:
RTH 高度
RTH/RTM* & 倒带
最高海拔
A/B 按钮
高级飞行模式
速度滑块
GoPo 设置
空降¶
完成上述所有步骤后,就可以在 ArduCopter Master 上进行首次飞行了!
起飞并验证 Solo 飞行的稳定性和可预测性。
测试所有轴向......前平移/俯仰、翻滚、偏航/航向、爬升、下降,甚至同时测试所有轴向。
测试 A & B 按钮上的飞行模式
确保 GPS 锁定良好
确保应用程序和控制器上显示的距离、高度、速度、模式和 GPS 数据正确无误,符合您的预期。
在附近安全悬停,让电池电量耗尽至失效保护状态。观察其行为并验证其是否正确执行了 RTH/RTM 程序。
备注
如果您在此过程中需要帮助排除故障或有任何疑问,请联系 独奏 Beta 测试 Facebook 群组 是最好的去处。
ArduCopter 参数¶
ArduCopter 中有 700 多个参数。在 Solo 的日常使用中,您仍然不需要担心任何参数。它们都在上述过程中通过默认值为您预先设置好了。Solo 的所有配置参数,如果需要与 ArduCopter 默认值不同的值,可以在 ArduPilot GitHub 代码库 /tools/frame_params/ 目录.这些是升级过程中加载的参数。如果您不熟悉参数编辑,也没有特殊的使用情况需要更改参数,则不建议更改这些参数。
不过,在一些高级和特殊的使用情况下,可能需要更改一些参数。下面详细介绍了一些供高级用户使用的关键参数。随着新的使用情况和修改的出现,这个列表可能会不断增加。
欧里亚特 是外部罗盘的方向。 |
|
|---|---|
价值 |
意义 |
38 |
右后腿上的原装指南针 |
0 |
HERE 外部指南针 |
FS_THR_ENABLE 控制独奏者对控制器信号丢失的反应。 |
|
|---|---|
价值 |
意义 |
0 |
无故障保护。不应使用。 |
1 |
如果有 GPS,将启动 RTH/RTM。如果没有 GPS,Solo 将着陆。 |
2 |
继续执行智能拍摄或自动任务。如果有 GPS,则继续 RTH/RTM。如果没有 GPS,Solo 将降落。 |
3 |
仅限着陆,无 RTH/RTM。这对室内飞行非常有用。 |
FS_BATT_ENABLE 控制 Copter-3.5(及更早版本)的低电量故障安全动作。对于 Copter-3.6(及更高版本),请检查 batt_fs_low_act 参数。当参数中设置的值为零时,电池电量不足故障保护装置会启动。 |
|
|---|---|
价值 |
意义 |
0 |
无故障保护措施 |
1 |
立即着陆,无 RTH/RTM。适用于室内。 |
2 |
RTH/RTM |
FS_BATT_VOLTAGE 是 Copter-3.5(及更早版本)的电池低电压阈值。对于 Copter-3.6(及更高版本),请检查 BATT_LOW_VOLT 参数。当电池电压降到该值以下时,低电量蜂鸣器会发出声音,然后它就会执行您的操作。 |
|
|---|---|
价值 |
意义 |
0 |
无低电压警报或故障保护装置 |
14 |
14 伏 |
FS_BATT_MAH 是 Copter-3.5(及更早版本)的电池剩余容量阈值,单位为毫安 (MAH)。对于 Copter-3.6(和更高版本),请检查 BATT_LOW_MAH 参数。当电池剩余电量低于此值时,低电量蜂鸣器会发出声音,这时它就会执行您所设定的操作。 |
|
|---|---|
价值 |
意义 |
0 |
无电池容量剩余警报或故障保护 |
520 |
520 MAH |
wp_yaw_behavior 指定自动飞行任务和 RTH/RTM 中的偏航行为。 |
|
|---|---|
价值 |
意义 |
0 |
不变。独奏者的偏航将保持指向同一方向,除非你改变它。 |
1 |
面向下一个航点,与飞行方向无关。 |
2 |
面向下一个航点(RTH/RTM 除外)。 |
3 |
沿 GPS 路线朝前走。 |
NTF_OREO_THEME 控制 Solo 的马达吊舱 LED 主题。仅适用于 ArduCopter 3.5.0 及更高版本。 |
|
|---|---|
价值 |
意义 |
0 |
残疾 |
1 |
飞机主题,前部为红色/绿色,后部为白色频闪。 |
2 |
以路虎为主题,前部为白色;后部为红色(就像以前的索罗车)。 |
AHRS_GPS_USE 用于启用或禁用 Solo 上的 GPS。默认为 1 表示启用。禁用 GPS 的主要用途是室内飞行。如果禁用 GPS,它就不能也不会尝试将其用于飞行、故障保险或任何其他功能。这意味着 RTH 模式不可用。您必须熟悉在没有 GPS 的情况下故障自保的工作原理。在大多数情况下,Solo 会降落,因为它无法进行 RTH。 |
|
|---|---|
价值 |
意义 |
0 |
禁用 GPS |
1 |
支持 GPS |
日志_解除警报 启用或禁用数据闪存(*.bin)日志记录。目前默认为启用,因为这对测试和故障排除非常有用。但它确实会产生大量且往往不必要的日志。如果您对 Solo 感兴趣并有信心,可以在撤膛时禁用日志记录。数据闪存日志会更加简洁和丰富。 |
|
|---|---|
价值 |
意义 |
0 |
已禁用/撤膛时无数据闪存记录 |
1 |
已启用 / 解除上膛和上膛时的数据闪存记录。 |