安装(飞行)控制器¶
本文介绍了如何以标准和其他方向安装(飞行)控制器。
标准方向¶
"这款" (飞行)控制器 (气压计(Pixhawk 等)应安装在一个箱子内(包括气压计上的泡沫),安装时白色箭头应直接指向载具前方。
它应靠近载具的重心(水平和垂直方向)。一般来说,这意味着应将其放置在载具中部几厘米的范围内,并与发动机保持水平。精确放置在中间位置并不重要,但越近越好(没有因控制器远离重心而导致问题的记录)。如果无法将(飞行)控制器放置在飞行器的中心位置,则将其设置为 IMU 位置偏移参数 可能会略微提高性能。
应使用 4 块约 3/4 英寸见方的减震泡沫将木板固定在框架上(3M 泡沫可从以下零售商处购买)。 移动机器人).

替代方向¶
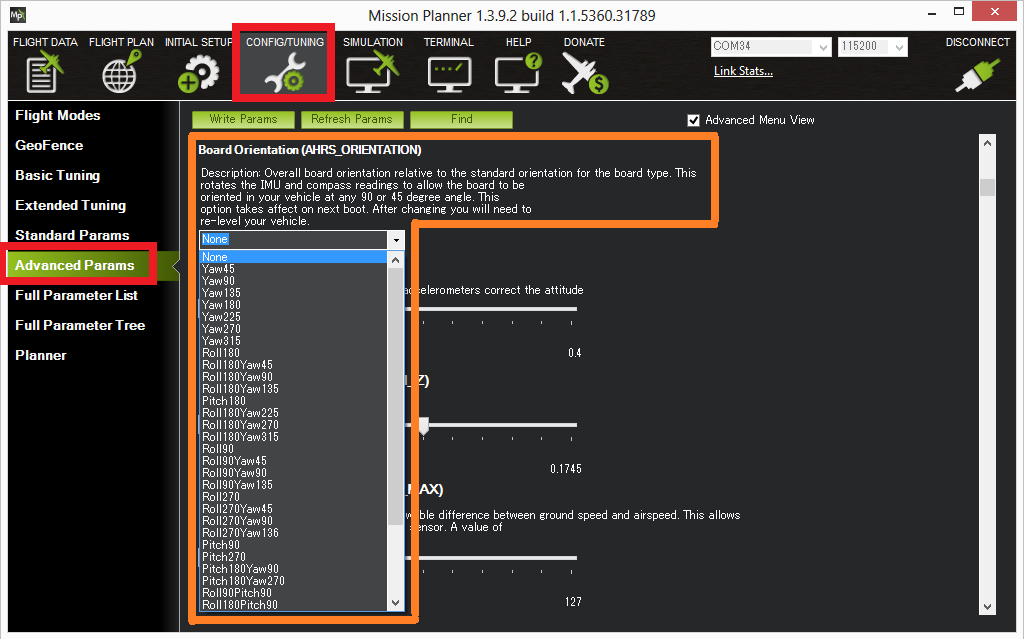
如果(飞行)控制器的标准方向不方便,还可以安装在其他 30 多个可能的方向上。可通过Mission Planner地面站查看和设置所有可能的方向列表
配置/飞行稳定调整 | 高级参数 屏幕,查找
官方 定向 (ahrs_orientation) 参数。
对于 "滚动 "值,正数表示向右滚动(例如,"Roll90 "表示棋盘向右滚动 90 度,因此白色箭头仍指向前方,但棋盘站在右边)。
对于 "前平移/俯仰 "值,正数表示俯仰向后(例如,"Pitch90 "表示滑板的前端向上倾斜 90 度,因此箭头直接指向上方)。
对于偏航值,正数表示板头顺时针旋转(例如,"Yaw90 "表示旋转板头,使白色箭头指向右侧)。
警告
如果电路板的安装方向不符合标准(即箭头不指向前方),请确保电路板上的 方向 在进行加速度计校准之前,请正确设置加速度计。