NAVIO2 装配和接线快速入门¶
本文提供了有关附加 NAVIO2 连接到 Raspberry Pi,为其最重要的外设供电和连接。
将 NAVIO2 连接到 Raspberry Pi¶
Navio2 上的 ArduPilot 正在运行:
树莓派 3 B 型
树莓派 2 B 型
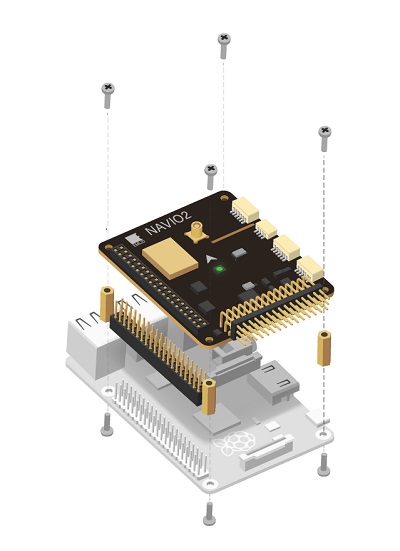
安装 NAVIO2:
在 Raspberry Pi 的顶部安装垫片,并用螺丝从底部固定。
将扩展头连接到 40 引脚 gpio 端口。
将 NAVIO2 安装到扩展头。
用螺丝固定 NAVIO2。
备注
Raspberry Pi2 需要外置 USB Wi-Fi 加密狗。支持的加密狗列表如下 这里.
为 NAVIO2 供电¶
Navio2 有三个电源,由于受到理想二极管的保护,所有电源均可同时使用。
用于测试和开发目的:将 5V 1A 电源适配器连接到 Raspberry Pi 的 microUSB 端口。树莓派将为 NAVIO2 供电。
在无人机中:NAVIO2 应由连接到 NAVIO2 上 "POWER "端口的电源模块供电。NAVIO2 将为 Raspberry Pi 供电。
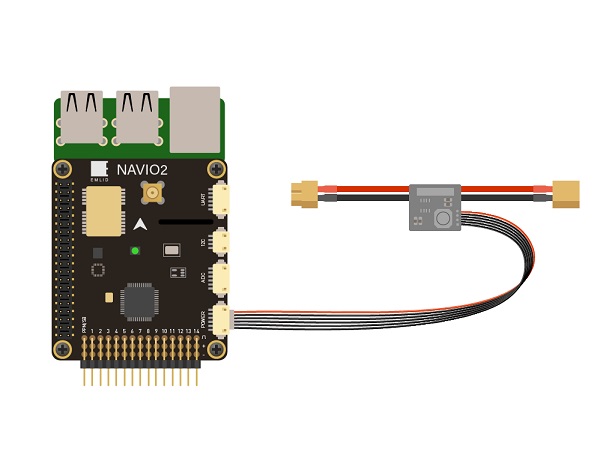
冗余:如果电源模块发生故障,NAVIO2 将切换到伺服轨道供电。
警告
所有电源应提供 4.8-5.3V 范围内的电压,否则会损坏 NAVIO2 和 Raspberry Pi。
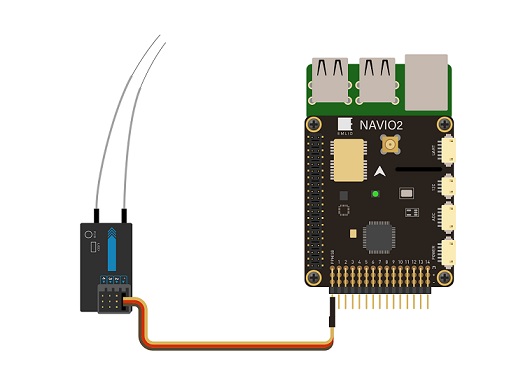
连接遥控输入¶
NAVIO2 支持 PPM 和 SBUS 信号作为 RC 输入。要连接不支持 PPM 输出的接收器,可以使用 PPM 编码器。PPM 接收器由 NAVIO2 供电,无需伺服轨道供电。
警告
不要将舵机连接到遥控接收器!舵机会消耗大量电能,而遥控接收器端口可能无法提供,这可能会导致 Raspberry Pi 和 NAVIO2 关闭,甚至损坏。
一些带有 PPM 输出的接收机:
用于 ACCST(大多数 FrSky 发射机):
FrSky D4R-II 4 频 2.4Ghz ACCST 接收器
FrSKY V8R7-SP ACCST 7 通道接收机,带复合 PPM
FrSKY D8R-XP
用于 FASST(Futaba & 一些 FrSky 发射器):
FrSky TFR4 4 频段 2.4Ghz 表面/空中接收器 FASST 兼容
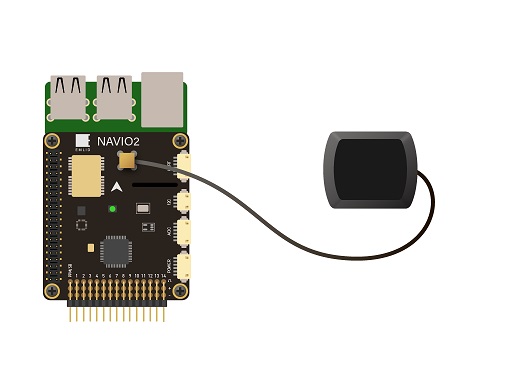
全球导航卫星系统天线¶
GNSS 天线插入 NAVIO2 顶部的 MCX 端口。
连接电机¶
电调连接到 2.54mm 接头上标有 1 至 14 的 RC 输出端。
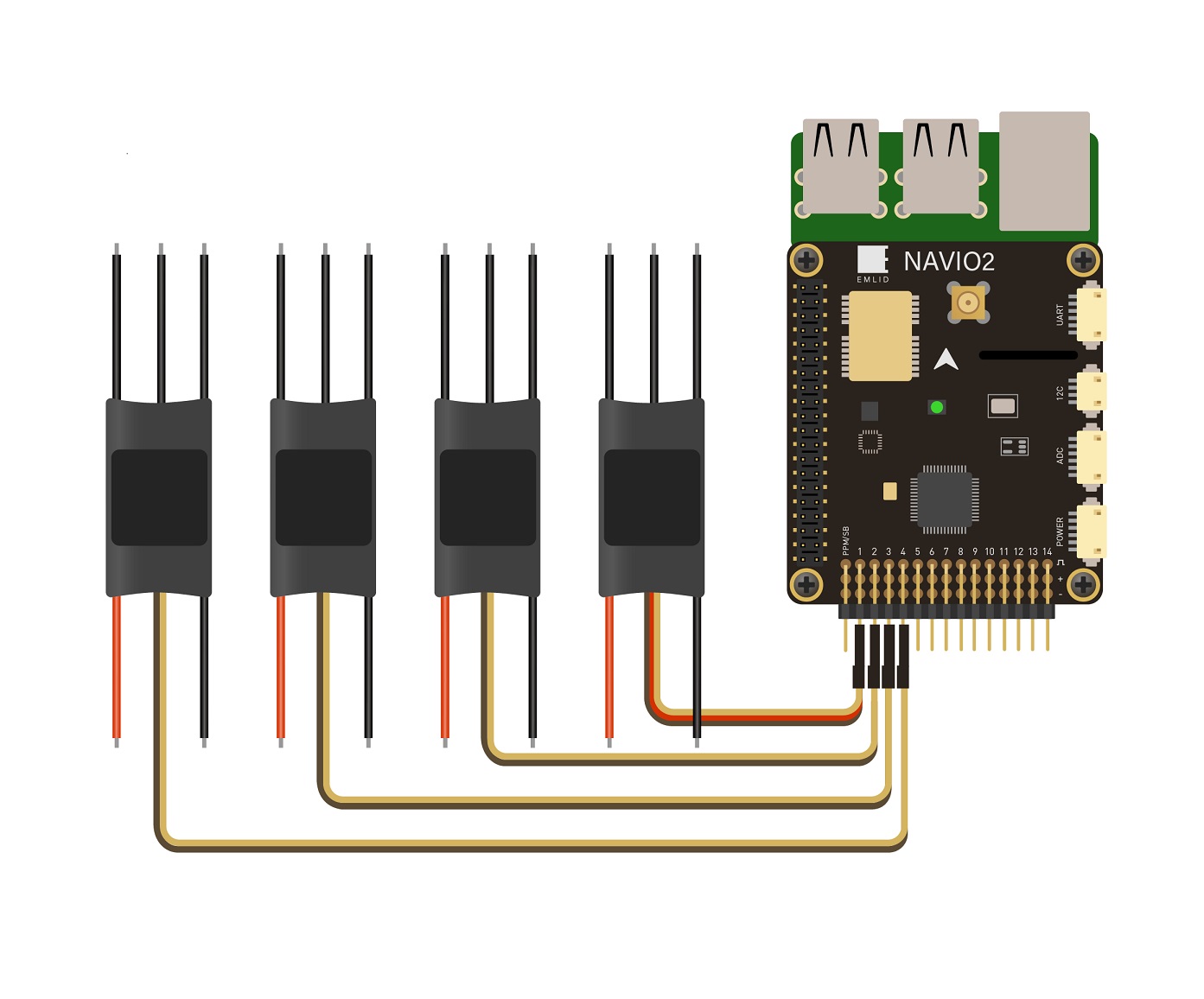
有关典型的电调设置方案,请访问 NAVIO2 文档 其中包括旋翼飞行器、飞机和漫游车装置。
备注
只能将一根电调电源线(中央)连接至 Navio2 伺服导轨,否则电调内置的 BEC 会相互发热。
连接其他外设¶
根据硬件的不同,还可能连接其他外围设备,包括传感器、摄像头、机械手等。
遥测¶
无线电调制解调器可通过 UART 或 USB 连接。
UART 无线电
对于 UART 端口,使用 /dev/ttyAMA0 串行端口。
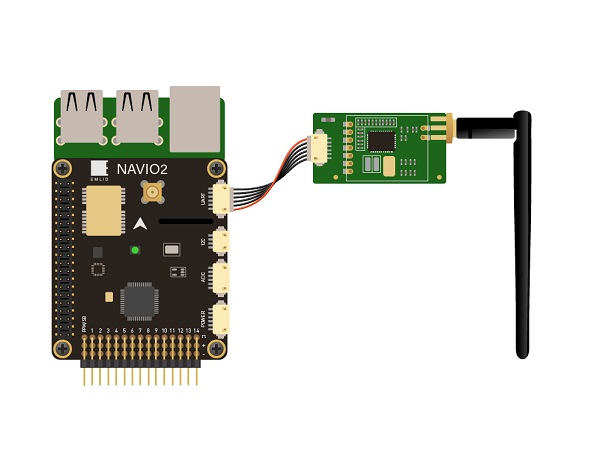
USB 收音机
使用 /dev/ttyUSB0 虚拟 USB 串口。

伺服系统¶
舵机连接到 2.54mm 接头上标有 1 至 14 的 RC 输出端。
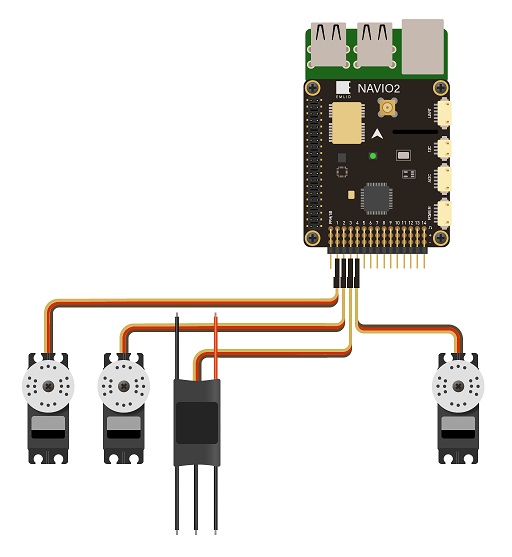
备注
电源模块不为舵机供电。要为舵机供电,请将 BEC 连接到舵机轨道。BEC 还可作为 Navio2 的备用电源。