传感器位置偏移补偿¶
ArduPilot 包括对载具上传感器位置的补偿。本页说明了可以设置哪些参数以及如何设置。
备注
大多数载具的所有传感器(IMU、GPS、光流等)之间的距离都在 15 厘米以内,因此提供偏移量不太可能明显改善性能。
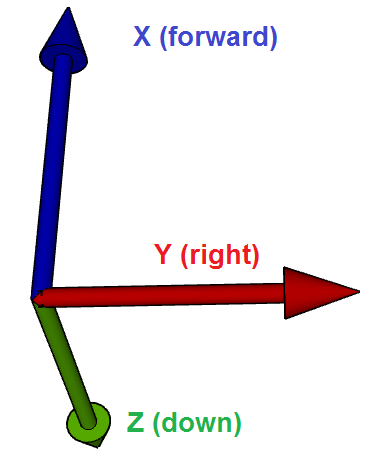
传感器的位置偏移被指定为 3 个值(X、Y 和 Z),它们是距离 IMU(可假设位于(飞行)控制器板的中间)或载具重心的距离,单位为米。
X:IMU 或重心的前方距离。正值指向载具前方,负值指向载具后方。
Y: IMU 或重心右侧的距离。正值朝向载具右侧,负值朝向载具左侧。
Z:距离 低于 IMU 或重心。正值为 降低负值为 更高.
在实践中,传感器的距离可以从(飞行)控制器的中心开始测量,除非(飞行)控制器本身与载具的重心有很大的距离,在这种情况下,可以指定 IMU 的位置偏移,然后从载具的重心开始指定其他传感器的位置偏移。
参数详情¶
IMU(又称 INS):
为达到最佳效果,(飞行)控制器(以及 IMU)应置于载具的重心位置,但如果实际上无法做到这一点,可通过设置以下参数对偏移量进行部分补偿。
INS_POS1_X, INS_POS1_Y, INS_POS1_Z 第一个 IMU 与飞行器重心的距离
INS_POS2_X, INS_POS2_Y, INS_POS2_Z 第二个 IMU 与飞行器重心的距离
INS_POS3_X, INS_POS3_Y, INS_POS3_Z 第三个 IMU 与飞行器重心的距离
补偿金仅为 偏颇 因为 ArduPilot 可以修正载具的速度和位置估计值,但无法修正加速度估计值。例如,如果将(飞行)控制器安装在载具的车头,而载具突然向后倾斜(即旋转使车头朝上),在没有偏移补偿的情况下,载具的速度估计值会瞬间显示载具正在爬升,而实际情况并非如此。增加位置偏移后,速度将不会显示这种瞬间爬升。EKF 仍会显示瞬间垂直加速度,由于我们在高度保持控制器中使用了加速度,这仍可能导致飞行器瞬间减小油门。
虽然可以为每个 IMU 设置单独的位置偏移,但大多数自动驾驶板上 IMU 的位置差异很小,因此可以对所有 IMU 使用相同的值
备注
如果指定了 IMU 偏移量,则以下所有偏移量都相对于 重心 而不是 IMU。
全球定位系统:
GPS1_POS_X, GPS1_POS_Y, GPS1_POS_Z 从飞行器的 IMU 或重力中心得出的第一个 GPS 的位置
GPS2_POS_X, GPS2_POS_Y, GPS2_POS_Z 第二个 GPS 从载具 IMU 或重心处获得的位置
测距仪(声纳或激光雷达):
RNGFND1_POS_X, RNGFND1_POS_Y, RNGFND1_POS_Z 第一个测距仪的位置与载具的 IMU 或重心的距离
RNGFND2_POS_X, RNGFND2_POS_Y, RNGFND2_POS_Z 第二个测距仪的位置与载具的 IMU 或重心的距离
光流:
FLOW_POS_X, FLOW_POS_Y, FLOW_POS_Z 与 IMU 或重心的距离
视觉测距
VISO_POS_X, VISO_POS_Y, VISO_POS_Z 与 IMU 或重心的距离