SkyRocket 软件¶
无人机装有一个定制版 ArduPilot (Copter),该版本接近 Copter-3.5,但增加了一些功能(带阻滤波器等)。 GitHub 仓库在这里 分支中的
视频板的固件源是 这里
APWeb (这是一个微型开源网络服务器),可在无人机上运行,方便校准、修改参数、向无人机和发射机上传固件、下载日志文件、图片和视频。
发射器采用了功率相对较低的 STM8 处理器,运行由 Tridge 编写的开放源码软件(包含 Paparazzi 的部分代码)。 Github repo 在这里.
实时视频可通过 SkyRocket 应用程序或Mission Planner地面站查看。
上传替代固件¶
下面的说明介绍了如何将替代固件上传到无人机。通常我们建议用户坚持使用 SkyRocket 的官方固件,但对于那些有兴趣尝试 ArduPilot 最新功能、参与 beta 测试或希望创建自己的定制固件的用户来说,这些说明非常有用。
请注意,可使用其他固件 风险自负 而且很可能导致保修失效。
使用哪个固件?
截至 2018 年初,有两个版本的固件可供选择:
的 来自 Skyrocket 的官方固件 (请参见以".abin "结尾的文件)是最安全的固件。
的 来自 ArduPilot 的最新固件 包括一些新功能(即 SmartRTL),但也缺少一些功能(如在 RTL 期间控制载具的能力)。
使用 SD 卡上传
关闭无人机电源,从 skyviper 背面取出 SD 卡并插入电脑(可能需要 SD 卡适配器)。
将固件复制到 SD 卡的顶层目录,然后重命名为 "flight_fw.abin"。
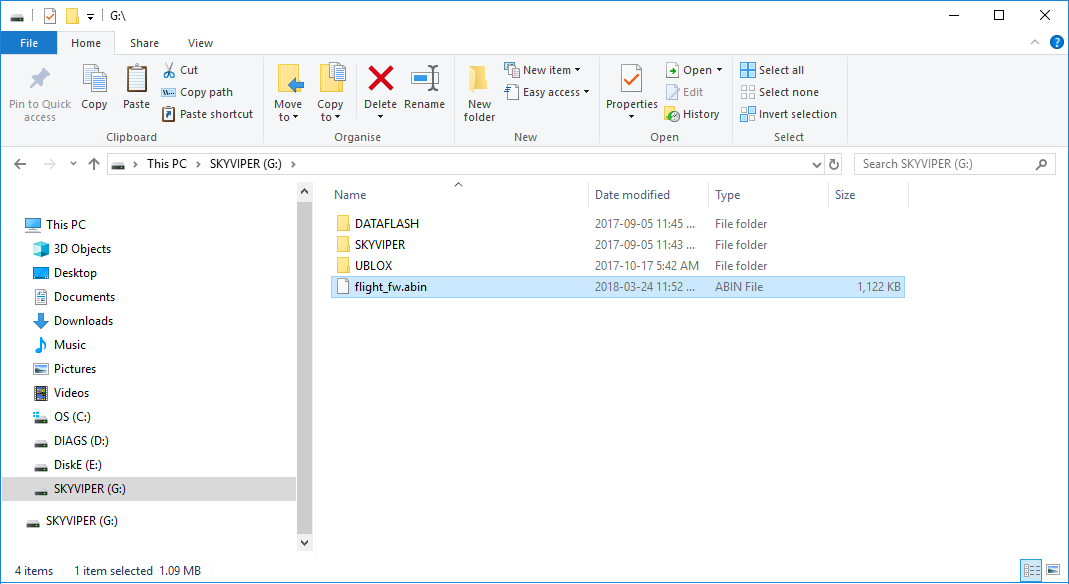
将 SD 卡放回无人机,然后启动载具
约一分钟后,LED 指示灯应闪烁,载具应重新连接到发射器
使用 APWeb 上传
从电脑连接到 SkyViper 无线接入点(通常称为 "SKYVIPERGPS-xxxxxx",密码为 "vipergps")。
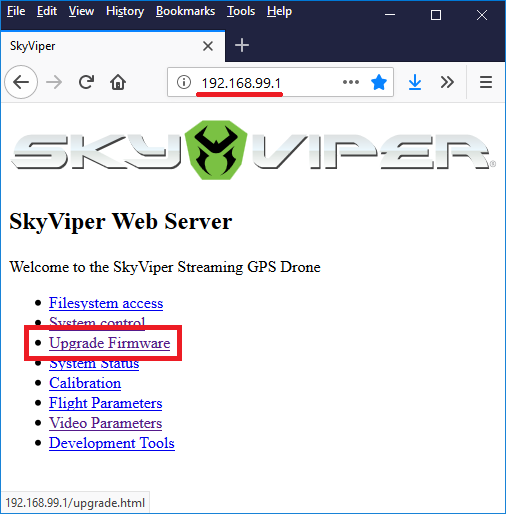
打开浏览器
http://192.168.99.1并点击 升级固件 链接
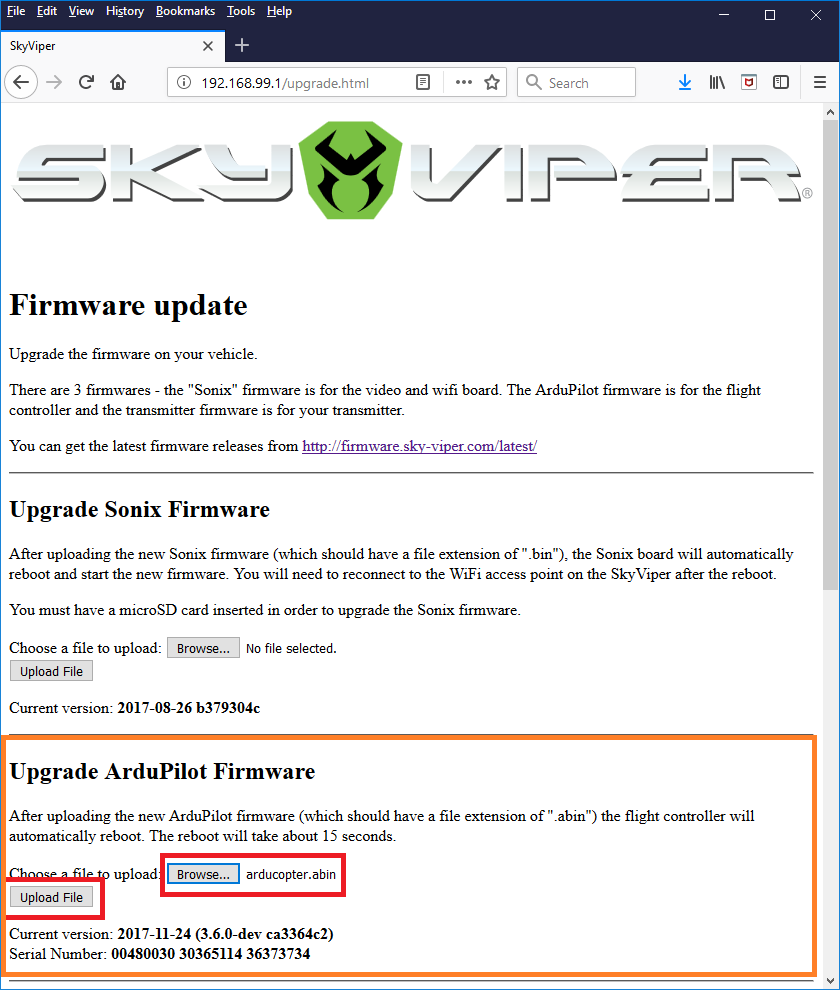
在 "升级 ArduPilot 固件 "部分,按 "浏览 "按钮并选择上面下载的 *.abin 文件
按下 "上传文件 "按钮并等待一两分钟。网页顶部的绿条应从左向右爬行,然后(飞行)控制器应重新启动并重新连接发射机
备注
固件升级后,可能需要执行加速度计校准。这可以通过网络界面的 "校准 "页面完成。
当事情出错时
如果无人机出现反应迟钝、无法连接发射器或 wifi 接入点不显示等情况,请不要担心,skyviper 几乎不可能 "变砖"。请尝试以下步骤:
从以下网址下载官方 Skyrocket 固件 这里 (查找以".abin "结尾的文件)。
使用上述 "使用 SD 卡上传 "的方法将固件上传到无人机上
如果还不行,请尝试在 ArduPilot 论坛 SkyViper 版块