3DR Solo - 使用 Solex 进行 ArduCopter 初始安装¶
这是使用安卓版 Solex 应用程序在 3DR Solo 上安装 ArduCopter 的详细说明。 在开始之前,您的独奏器应处于安全工作状态.在开始之前,它不应出现故障或不可靠。它必须是最新的 3DR 固件。开箱即用的 Solo 无法做到这一点。您必须先对新的 Solo 进行完整的飞行前更新。一旦您的 Solo 是最新的并且运行良好,您就可以开始此过程了。
备注
如果您在此过程中需要帮助排除故障或有任何疑问,请联系 独奏 Beta 测试 Facebook 群组 是最好的去处。
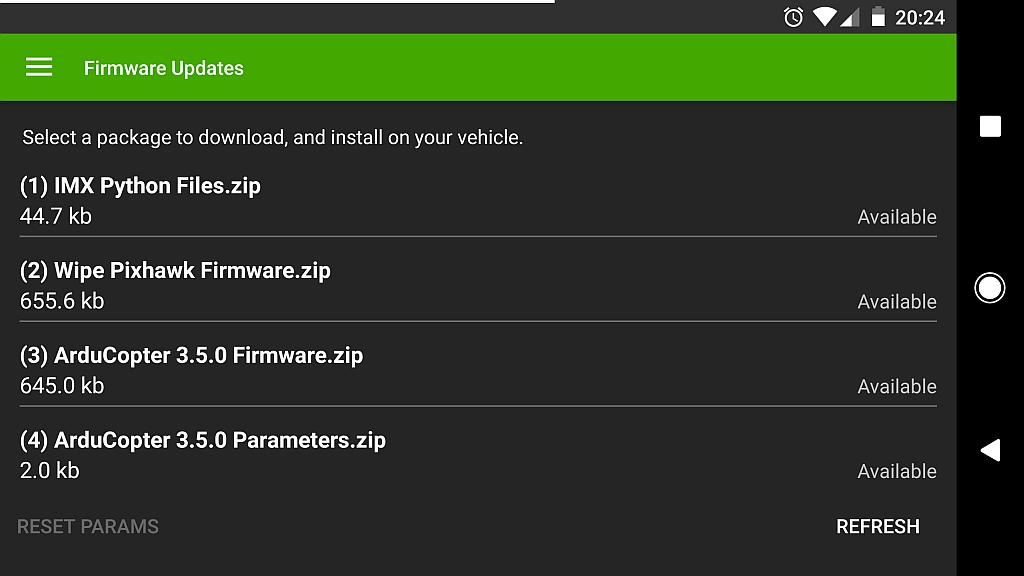
1) 将所需文件下载到 Solex: 在设备有互联网连接的情况下,进入底部的 Solex 菜单,选择 固件更新.如果在主菜单中没有看到 "固件更新",请转到 应用程序设置 并确保高级模式已启用。进入 固件更新点击刷新按钮,查看服务器上的最新文件。点击每个所需软件包进行下载。每个软件包的可用状态都将变为已下载。截至本文撰写时,所需的 4 个软件包是
IMX Python 文件擦拭 新 Pixhawk 固件.zipArduCopter 3.5.x 固件.zipArduCopter 3.5.x 参数.zip这里 指南针 参数.zip只有当您安装了 HERE 外置 GPS/指南针时
2) 更新 python 文件: 在进行其他操作之前,您必须将新的 python 文件加载到 Solo 的 IMX 配套计算机上。用 Solex 与 Solo 连接。在 Solex 固件更新菜单中选择 IMX Python 文件.zip 包装。阅读通知并选择 安装.所有文件都会复制到 Solo 的正确位置。出现提示时,启动 Solo。文件将在重新启动时编译。此步骤必须在 之前 将 Pixhawk 2.1 Green Cube 安装到单人飞行器中!
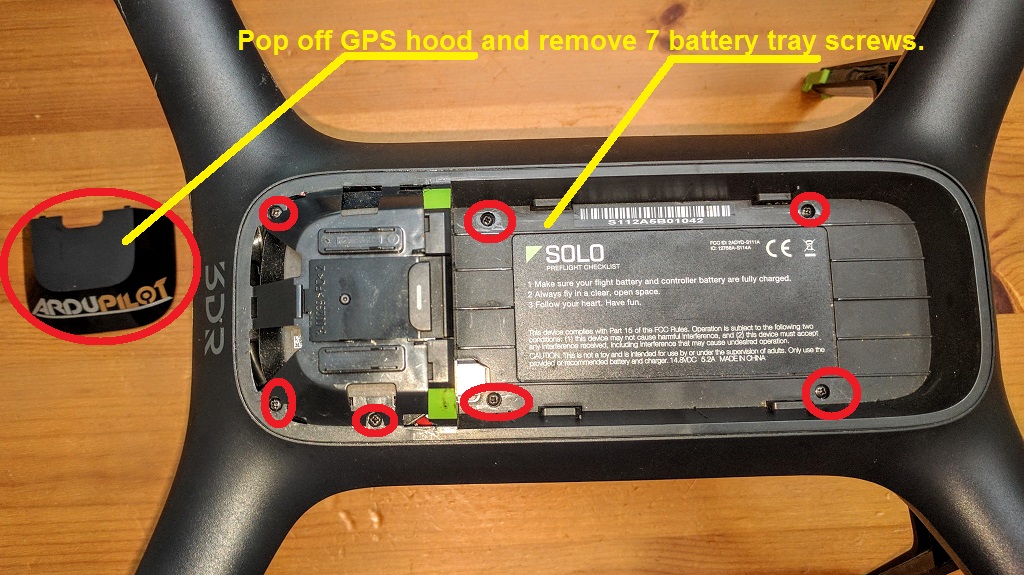
3) 取出电池盒: 取下电池,弹开 GPS 盖。然后拧下电池盒周围的所有黑色小螺丝。现在可以将电池托架抬起。小心地从载板上拔下 GPS 插头。将电池盒放在一边。
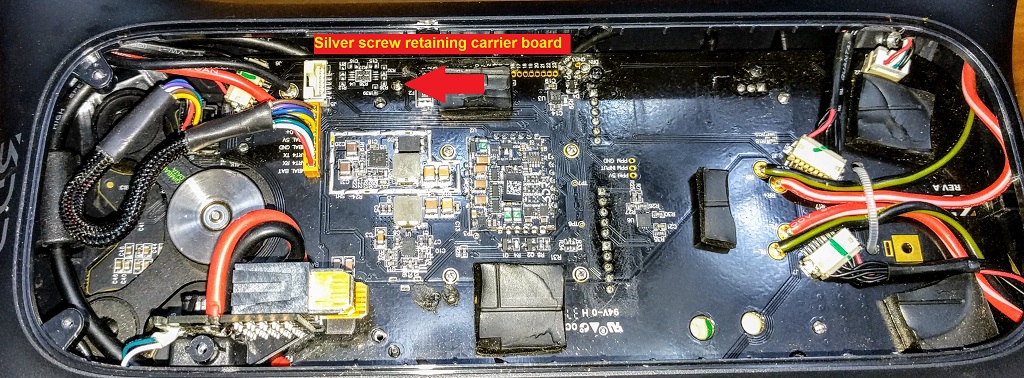
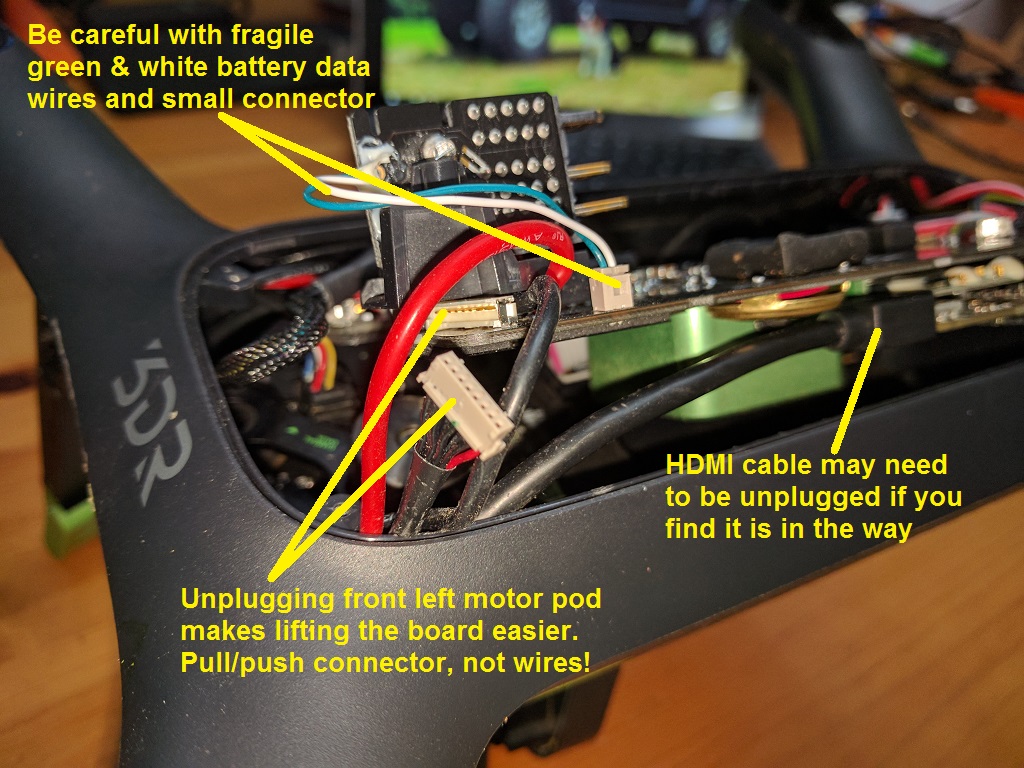
4) 抬起承载板: 找到右侧朝前的比较大的银色螺丝。将其拧下,与其他螺丝一起放在一边。现在可以非常小心地抬起载板。您需要稍微摆弄一下电机吊舱上的电线。将左前电机吊舱的插头从载板上拔下会使操作更加容易。电路板需要先往上移一点,然后再往后移,最后再往上移。左侧可以比右侧高一些,这很方便。这有点紧,总的来说很烦人。小心不要弄断小电线。也不要弄断其他电线。您需要将电路板升到足够高的位置,以露出安装在下面的 Pixhawk。这是一个黑色的立方体装置。
5) 拧下原装 Pixhawk: 载板顶部有 4 个很小的螺丝。拧开后放在一边。现在可以取下原装 Pixhawk。它将从载板上拉下。将原有的 Pixhawk 放在安全的地方。您将希望保留它。
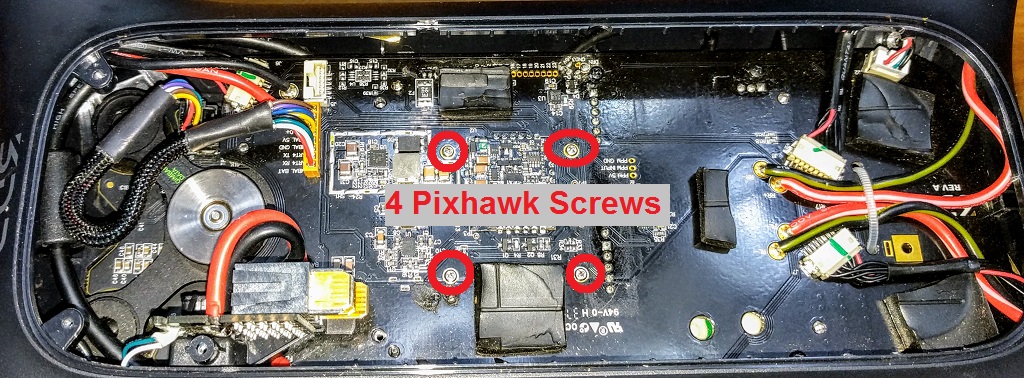
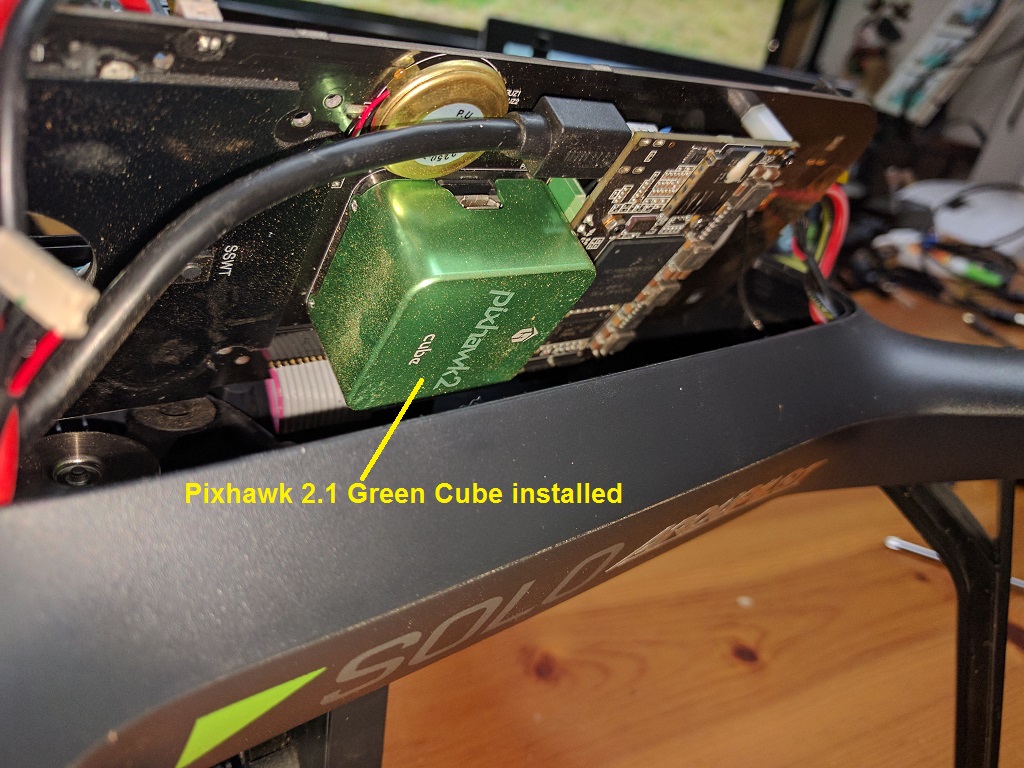
6) 安装绿色方块: 绿色立方体的安装方式与旧立方体的安装方式相同。将它从底部插入载板。然后拧上四颗螺丝。
备注
先不要重新组装: 最好在 Solo 仍然打开的情况下进行初始固件安装。如果出了什么问题,可以避免再次拆卸。
7) 接通 Solo 电源并重新连接控制器: 将电池装到独奏板上。电池就放在载板上。显然,此时应避免过多移动独奏者,因为电池可能会掉落。所以先把所有东西都放好。打开电池。Solo 会像往常一样启动。过一会儿,Solo 会像往常一样与控制器重新连接。它可能会发出各种有关校准的警告。这是正常的,也是预料之中的。
8)重新连接 将您的移动设备连接到 Solo 的 WiFi,并确保 Solex 显示它是 与载具连接.
9) 擦拭 Pixhawk: 在 Solex 固件更新菜单中,点击 擦拭 新 Pixhawk 固件.zip 包装。阅读通知并选择 安装.所有文件都会复制到 Solo 的正确位置。出现提示时,启动 Solo。它会重新启动,然后切换到启动加载器模式。正常情况下,你会看到迪斯科灯亮起。但如果未启用 LED 驱动程序,则可能看不到。别担心,它正在工作。它在工作。给它 3-5 分钟处理时间。当 Pixhawk 重新启动时,您可能会听到一些咔嗒声。3-5 分钟后,您将听到一些提示音,表明处理完成。它将恢复正常,重新连接控制器和 Solex。
10) 安装 ArduCopter: 在 Solex 固件更新菜单中,点击 ArduCopter 3.5.x 固件.zip 包装。阅读通知并选择 安装.所有文件都会复制到 Solo 的正确位置。出现提示时,启动 Solo。它会重新启动,然后切换到启动加载器模式。正常情况下,你会看到迪斯科灯亮起。但如果未启用 LED 驱动程序,则可能看不到。别担心,它正在工作。它在工作。给它 3-5 分钟处理时间。当 Pixhawk 重新启动时,您可能会听到一些咔嗒声。3-5 分钟后,您将听到一些提示音,表明处理完成。它将恢复正常,重新连接控制器和 Solex。
备注
如果 5 分钟后 Solo 似乎仍未完成固件安装,请关闭 Solo 电源并重新打开。有几个人遇到过这种情况。要经过几次电源循环才能完成。目前还不知道为什么会发生这种情况。但在这些情况下,只要通电循环 1-4 次就能完成安装。
11)重置参数: 在 Solex 固件更新菜单中,点击 重置参数 按钮。阅读通知并按 是.出现提示时,对独奏进行电源循环。(这一步是多余的,因为之前的固件擦除也会重置参数。我们这样做是为了稳妥起见)。
12)加载参数: 在 Solex 固件更新菜单中,点击 ArduCopter 3.5.x 参数.zip 包装。阅读通知并选择 安装.参数将被写入 Solo 的 Pixhawk。出现提示时,对 Solo 进行电源循环。Solo 将重新启动并重新连接控制器和应用程序。您会发现 LED 灯现在看起来像飞机而不是载具。安装完成!
备注
如果安装了 HERE 外部指南针,请加载
这里 指南针 参数.zip在 ArduCopter 参数之后和重启之前。如果您有原装的脚指南针,请不要加载 HERE 指南针软件包。
13)重新组装独奏曲: 成功完成上述所有步骤后,就可以重新组装 Solo 了。确保没有任何螺丝残留。确保插回所有电线,包括 GPS 和电机吊舱。小心连接电池连接器的绿色和白色 SMBUS 小导线。
14)连接并检查: 重新打开 Solo。连接您计划使用的所有应用程序(3DR、Solex、Side Pilot 等)并测试功能。运行乌龟/兔子速度滑块,并一路平移到兔子,然后再一路平移到乌龟。这些滑块可以更改参数。上下运行滑块可确保这些参数设置符合要求。检查所有设置。触摸所有设置并验证所有内容。不要认为这些设置与以前一样。
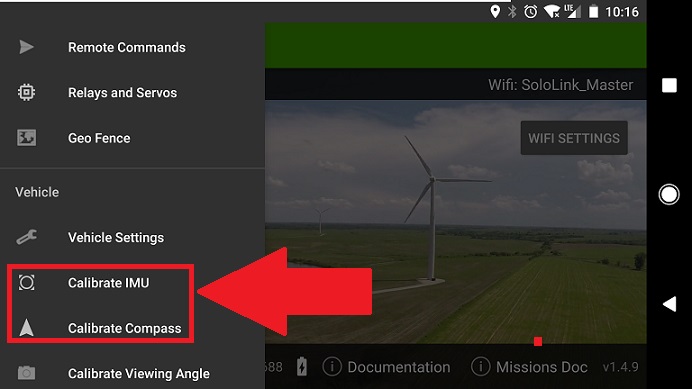
15)校准: 完成所有这些工作后,您需要进行 3D 加速计校准(又名加速度校准,又名电平校准,又名 IMU 校准)和指南针校准。Solex v1.4.9 及更高版本的菜单中有这些校准功能。它们的工作方式与 3DR Solo 应用程序中的工作方式相同。- 首先在实际水平面上进行水平校准,例如桌子。对于每个方位,将 Solo 轻轻放下,让其静止约 5 秒钟后再点击进入下一个方位。当您按下按钮时,它必须保持完全静止,因此请将手从飞行器上拿开!校准完成后,必须重新启动 Solo。- 指南针校准必须在室外的空旷区域进行,远离建筑物、载具和其他金属物体。这适用于运行任何固件的任何飞行器,不仅仅是 Solo,也不仅仅是 ArduCopter 主控器。校准完成后,必须重新启动 Solo。
16)飞! 完成以上所有步骤后,您就可以开始飞行了!
返回升级主页 了解首航详情。